一种基于区域数据关联的传感器特征挖掘方法∗
2020-10-10 02:44
舰船电子工程 2020年8期
(海装信息局 北京 100841)
1 引言
信息的精准获取已成为当前决定战争走势的重要因素,现代信息监视系统主要采用多传感器监视实现对目标的连续、精确跟踪。在实际的多次传感器组网数据融合试验中发现,传感器误差配准不够准确,数据融合效果并不如预料的那么好:一方面会导致产生虚假目标或分裂目标;另一方面航迹关联正确率及数据合成精度会降低,严重影响融合的系统性能。因此传感器误差配准是我们当前需要解决的一个关键问题。
传统的传感器误差技术研究主要集中在随机误差和系统误差两个方向。传感器随机误差一般采用基于最小二乘、卡尔曼滤波等多模自适应滤波方法去消除[1~3];传感器系统误差多采用卡尔曼、最小二乘、极大似然估计等算法进行误差建模,再对传感器系统误差进行估计校正。工程现场试验中发现,受天气、海况、电磁等复杂环境影响,传感器实际误差特征不符合传统的误差模型建立条件,传感器误差估计结果不再可信,采用传统的传感器误差模型算法常常不能够解决传感器误差带来的信息精度降低问题。因此,我们需要转变传感器误差研究模式,尝试新的科研途径,建立适合工程的传感器误差估计方法。本文根据海量情报数据,建立传感器特征挖掘框架,提出基于结构特征相似度的情报目标轨迹聚类方法,对聚类目标进行传感器特征挖掘分析并生成传感器特征知识,可为提高战场情报数据融合传感器特征处理的自动化、智能化水平提供借鉴。
2 基于区域数据关联的传感器特征挖掘框架设计
数据挖掘是一种获取内在有用知识的过程,这些知识来源于掌握的海量的历史数据信息[4]。海战场传感器特征挖掘属于数据挖掘技术,通过使用聚类、神经网络等挖掘算法[5~7],对存储在数据库中的海量历史目标情报数据,挖掘出有用的传感器特征知识。基于情报大数据的传感器特征挖掘方法,能够为实时目标的数据融合提供技术支撑。
基于情报大数据的传感器特征挖掘总体框架如图1所示。

图1 基于区域数据关联的传感器特征挖掘总体框架
如图1所示,基于区域数据关联的传感器特征挖掘包含情报数据采集、情报数据清洗、传感器特征挖掘和传感器特征知识推理等步骤,具体为
1)情报数据采集:收集各种传感器目标、天气水文等情报信息,存储到历史目标情报数据库中;
2)情报数据清洗:将数据采集或查询大数据平台存储的数据通过数据清洗处理形成有效的格式化数据,并将其传递给数据管理部分进行存储;
3)传感器特征挖掘:通过采用数据挖掘算法从历史目标情报数据库中挖掘产生传感器特征知识,挖掘出的知识存入传感器特征数据库;
4)传感器特征知识推理:对接收到的各种实时情报信息,结合传感器特征数据库,通过智能化推理技术进行推理,从而对实时战场目标进行数据融合处理。
由此可见,实现基于情报大数据的传感器特征挖掘的关键在于传感器特征挖掘和传感器特征知识推理两个方面。
3 基于区域数据关联的传感器特征挖掘算法
传感器特征知识挖掘通过挖掘传感器情报中水文、气象、目标区域、目标距离、目标方位、目标仰角等信息对传感器误差特征的影响,从而获取到传感器特征与探测环境之间的知识规则。本节首先通过结构特征相似度计算方法对同类传感器情报目标进行聚类,对聚类的目标进行传感器特征挖掘分析,生成传感器特征知识并入库,可对实时数据融合处理系统传感器数据预处理阶段提供有效的传感器特征知识推理。本节在对指定区域的情报大数据进行传感器航迹与高精度航迹、传感器航迹与传感器航迹关联基础上,建立传感器误差估计数学模型,提出基于点估计的传感器系统误差估计算法。
3.1 传感器目标航迹数据关联
轨迹聚类是活动热点挖掘领域常用的方法[8~13],本文把情报目标当成空间轨迹进行处理。本节主要对情报数据库中指定传感器的目标航迹数据进行聚类关联,首先通过把传感器航迹划分成轨迹片段,与其他航迹轨迹上的片段进行比较,计算出轨迹结构相似度,其次通过最近邻算法计算出中心轨迹片段和轨迹聚类,为后面的基于区域的传感器特征挖掘做好数据关联准备。
3.1.1 抽取传感器目标航迹的结构特征
图2表明,本文中的目标航迹转角表示目标航迹的运动趋势,通过相邻轨迹分段的转向角来量化计算。α表示一条航迹在分段出的夹角;θ1和θ2表示该条航迹的转角,分别用整数和负数来表示,为航迹轨迹结构相似度计算提供基础。
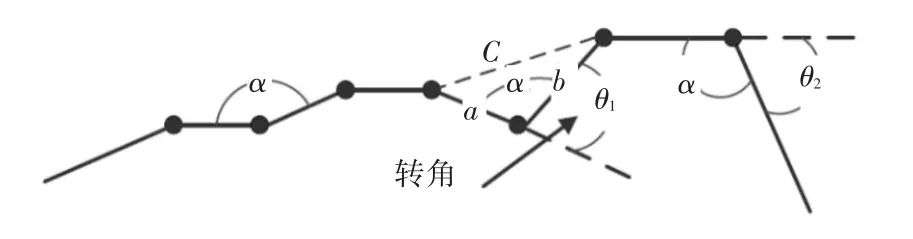
图2 目标航迹转角
由目标航迹转角图可以看出,夹角α所在的三角形的三条边为a,b,c,通过三角形夹角公式计算出α为

在夹角α基础上,计算航迹转角θ为
完成了传感器航迹轨迹划分之后,计算传感器航迹的结构距离公式为

在计算出结构距离之后,通过公式计算传感器目标航迹的结构相似度为

本文采用传感器目标航迹的结构相似度计算结果来比较目标航迹的相似程度,其前提条件是,对同一条航迹之外的所有航迹段来比较。传感器目标航迹的结构相似度值越大,表示相似程度越低,传感器目标航迹的结构相似度值越小,表示相似程度越高。因此,用传感器目标航迹的结构相似度值来衡量航迹差异是合理的,从该值的大小可以看出目标航迹轨迹的相似程度,另外可以得出距离对称这样一个结论:SSIM(Li,Lj)=SSIM(Lj,Li))。
3.1.2 传感器目标航迹结构相似度计算
传感器目标航迹结构相似度计算需要涵盖目标航迹段方向DirDist(Li,Lj)、目标航迹段速度SpeedDist(Li,Lj)、目标航迹段转角AngleDist(Li,Lj)、目标航迹段位置LocDist(Li,Lj)等几个关键信息对比((1≤i≠j≤n))。本文采用Pi1,Pi2,...,Pin(1≤i1<i2<...≤m)构成目标航迹段Li。
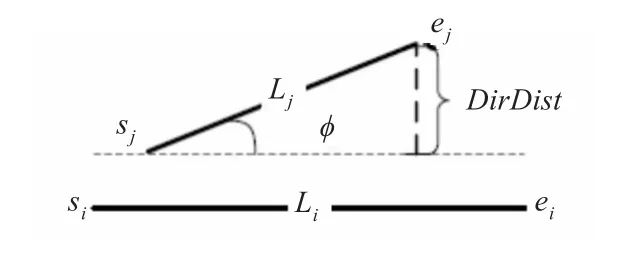
图3 航迹目标方向结构特征图
1)目标航迹段方向对比:如图3航迹目标方向结构特征图所示,假设φ为航迹段夹角,则目标航迹Li,Lj的运动趋势变化程度为DirDist(Li,Lj)为:

如果航迹段夹角φ比较大,并且DirDist为被对比的航迹段长度,则表示对比的两个目标航迹段方向是相反的;如果航迹段夹角φ比较小,并且DirDist≈0,则表示两个目标航迹段方向是同向的。
2)目标航迹段速度对比:用目标的最大速度、最小速度和平均速度等要素来衡量速度差异,则目标航迹运动速度变化程度SpeedDist(Li,Lj)为

其中,最大速度差距Smax(Li,Lj)= |Vmax(Li)-Vmax(Lj)|,同样的计算方式得到目标的平均速度、最小速度差距Savg,Smin。
3)目标航迹段转角对比:由于航迹段的运动走向决定了航迹段转角值,因此用航迹转角距离衡量整条航迹的累计转角值,则目标航迹段转角对比为

4)目标航迹段位置对比:用拓扑公式计算出目标航迹段位置距离LocDist(Li,Lj)为

其中,航迹段Li的全部点与航迹段Lj之间的欧式距离为dist(a,b),计算距离最大值即为拓扑距离h(Li,Lj)=max(min(dist(a,b)))。
3.2 基于区域的传感器特征挖掘算法
传感器特征知识挖掘通过挖掘传感器情报的特征参数,比如传感器情报中水文、气象、目标区域、电磁环境、目标距离、目标方位、目标仰角等信息对传感器误差特征的影响,从而获取到传感器特征与探测环境之间的知识规则。本节首先通过结构特征相似度计算方法对同类传感器情报目标进行聚类,对聚类的目标进行传感器特征挖掘分析,生成传感器特征知识并入库,可对实时数据融合处理系统传感器数据预处理阶段提供有效的传感器特征知识推理。本节在对指定区域的情报大数据进行传感器航迹与高精度航迹、传感器航迹与传感器航迹关联基础上,建立传感器误差估计数学模型,提出基于点估计的传感器系统误差估计算法。
3.2.1 传感器误差模型
传感器误差一般分为随机误差和系统误差,由于传感器观测误差的存在,传感器对目标的探测位置往往会偏离目标真实位置。在融合试验过程中,经常会有高精度雷达或以各种方式获得的高精度航迹,本文以高精度目标数据为基准,采用传感器探测值建立误差模型,从而估计出传感器的系统误差,供融合预处理使用。
其中:

3.2.2 基于高精度目标参照的传感器误差挖掘算法
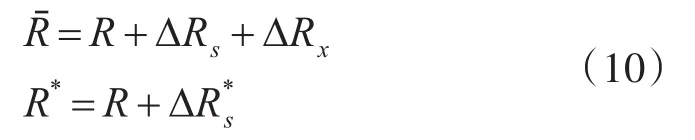
其中,R为目标实际距离值;ΔRs为传感器目标的距离随机误差;为高精目标的距离随机误差;ΔRx为传感器的距离系统误差。
本模型的前提条件是,高精参照值不存在系统偏差,则有

根据大数据样本统计理论,随着样本量n足够大时,有以下公式:

从上述公式可知,当系统误差估计样本量足够大时,雷达目标探测值和高精度参照值两者之间的差值即为雷达的系统误差。同样的模型建立方法,可以估计出雷达的方位系统误差Δθx。
4 仿真实验
实验场景设定在南海区域目标数据集,包括A型雷达探测数据和GPS数据,包括2000条多维航迹数据和500条不规律的目标航迹数据。首先用本文的目标轨迹聚类方法把A型雷达探测到的目标轨迹和GPS轨迹关联对应,从距离、方位和仰角三个维度分析雷达A的特征,再用基于区域的传感器特征挖掘算法计算雷达A的随机误差和系统误差。分析图表见图4和表1。
本文从距离、方位和仰角三个维度分别分析了传感器探测特征。图4(a)黄色图形表示随着目标距离从0km~30km由近及远,传感器探测到目标的距离、方位和仰角误差变化情况:距离在5km附近时,方位误差比较大,并且误差值不稳定;距离误差和仰角误差受目标距离影响较少。图4(b)紫色图形表示随着目标方位从0°~140°由小到大,传感器探测到目标的距离、方位和仰角误差变化情况:目标方位小于50°时,传感器方位误差比较大,且不稳定,较大值会达到0.6°以上;距离误差和仰角误差受目标方位影响较少。图4(c)绿色图形表示随着目标仰角从-0.2°~1°由小到大,传感器探测到目标的距离、方位和仰角误差变化情况:目标仰角在0°附近时,传感器距离误差和方位误差比较大,且不稳定;仰角误差受目标方位影响较少。通过以上实验分析,挖掘出A型雷达的受位置因素影响知识特征如表1所示。
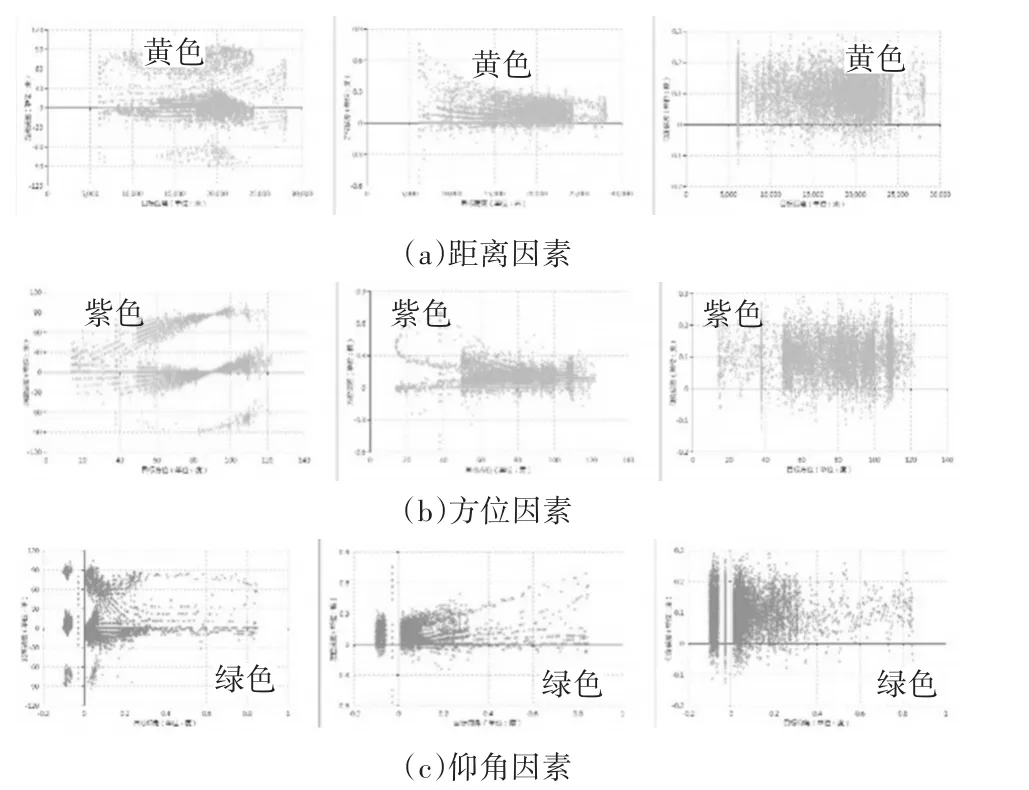
图4 传感器性能受位置影响分析图
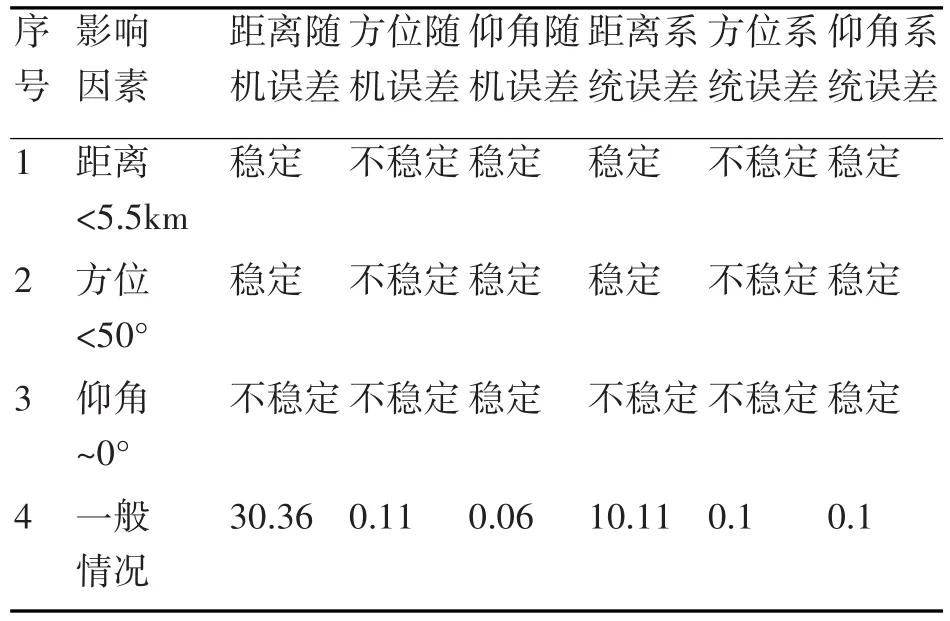
表1 传感器位置因素特征知识
实验结果说明本研究提出的基于情报大数据的传感器特征挖掘方法在大数据场景中可以挖掘出传感器特征知识,为情报处理传感器误差校准提供借鉴。
5 结语
传统的传感器误差估计方法受环境位置影响较大,本文提出了基于情报大数据的传感器特征挖掘算法,在对目标轨迹数据相关的基础上,多维度挖掘传感器距离、方位和仰角误差特征知识。仿真实验结果表明,本文提出的方法能够有效估计传感器误差。下一步还需要从传感器情报中水文、气象、电磁环境、目标区域等方面多维度对传感器特征知识进行深度挖掘。
猜你喜欢
航空学报(2022年9期)2022-10-14
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
初中生世界·九年级(2020年2期)2020-04-10
黑龙江教育·中学(2018年1期)2018-04-02
中学生理科应试(2017年2期)2017-04-01
科技视界(2016年15期)2016-06-30
红领巾·成长(2009年8期)2009-01-12