
基于温度和PZT协同控制的激光器频率锁定技术研究
2020-09-29 06:25于怀勇张丽哲
光电工程 2020年9期
雷 明,于怀勇,方 圆,向 强,杨 怿,张丽哲
北京自动化控制设备研究所惯性技术国家重点实验室,北京 100074

1 引 言
谐振式光纤陀螺(Resonator fiber optic gyro,RFOG)是一种基于 Sagnac效应引起谐振频率偏差变化实现角速度检测的新型惯性传感器,凭借其精度高、体积小、重量轻的技术优势,已经成为目前陀螺惯性器件的重要发展方向和研究热点[1-3]。根据RFOG传递函数可计算得到 1 °/s的陀螺转动对应的谐振频率变化通常在1 kHz以下,而激光器稳定状态下的自身频率漂移高达几十 MHz以上[4],谐振腔谐振频率受温度影响更是高达GHz/℃量级。因此,RFOG的稳定工作以激光器中心频率对谐振腔谐振频率的跟踪锁定作为前提条件,陀螺跟踪锁定精度和稳定度将会直接决定陀螺性能[5]。激光器的频率跟踪锁定方法包括:激光器中心频率调谐法[6]、相位调制器锁频控制法[7]和谐振腔谐振频率调谐法[8]。采用相位调制器锁频控制主要是基于相位调制器的移频功能,具有高调谐带宽,但频率调谐量低,频率跟踪长期稳定性差。谐振腔谐振频率调谐法是将光纤谐振腔缠绕在压电陶瓷(PZT)上,通过逆压电效应引起的形变改变谐振腔腔长,实现谐振腔谐振频率对激光器中心频率匹配,该方法响应速度快,调谐范围大,但是需要将谐振腔均匀绕制于PZT上,对缠绕精度提出了很高的要求。激光器中心频率调谐法通过控制激光器温度、电流或者激光器内部PZT电压等方式实现激光器中心频率闭环控制,具有调谐范围宽、响应速率快等技术优势。
本文针对基于光纤激光器的 RFOG,提出一种基于激光器温度和PZT协同控制的频率跟踪锁定技术方案,综合利用激光器温度调谐所具有的大范围、PZT电压调谐的高精度高动态技术优势,以实现光纤激光器中心频率对谐振腔谐振频率的跟踪锁定。本文进行了透射式谐振信号的数学仿真,对温度和PZT协同控制方案进行了硬件设计和算法仿真,重点分析了频率跟踪锁定方案中控制参数对锁定稳定性的影响情况。完成了激光器频率锁定系统的研制,实现了激光器中心频率对谐振腔谐振频率的高精度、长时间跟踪锁定,为谐振式光纤陀螺长期稳定性优化奠定了重要的技术基础。
2 系统设计与理论仿真
2.1 总体方案设计
激光器频率锁定系统如图1所示,其中由窄线宽光纤激光器FL发出的激光经光隔离器ISO后,进入起偏器P进行偏振光起偏,经相位调制器PM后通过光纤耦合器 C1耦合进入光纤环形谐振腔(fiber ring resonator, FRR)进行顺时针光传输,经多圈光传播后经耦合器C2耦合输出,在C2输出端口发生多光束干涉,经探测器PD进行光电信号转换形成透射式谐振峰信号,数字信号处理器DSP发生调制器信号施加到PM上,并进行频差信号解调,然后通过控制 FL的温度和PZT端口进行光频率调谐,实现FL输出光频率对FRR谐振频率的闭环跟踪锁定。
光纤环形谐振腔FRR作为激光器频率锁定控制的核心部件,其输出特性决定频率锁定效果,图1中透射式结构FRR的输出光强表示如下[9]:


图1 光纤激光器频率锁定系统示意图Fig.1 Diagram of the frequency locking system for fiber lasers
其中:E0为入射光电场,κ,αc分别为耦合器C1/C2的耦合系数与插入损耗,αl为FRR的传输损耗,ω0为入射光的角频率,τ为光纤环圈的渡越时间。对透射式谐振腔的输出光强进行仿真分析,如图2所示。谐振曲线表现为暗背景下的亮条纹,在激光器中心频率等于谐振腔的谐振频率时,谐振腔输出具有最大的光强输出。
图2中的横坐标FSR为谐振腔的自由谱线宽度,定义为两个相邻的谐振信号频差(ΔFFSR),表达式[10]:

其中:c为真空中的光束,L为光纤谐振腔所用光纤长度,n为光纤折射率。
2.2 频率跟踪锁定方案设计
系统光源采用丹麦NKT公司生产的可调谐DFB光纤激光光源,激光器中心频率为1550.12 nm,带有PZT调谐模块和温度调谐模块。综合激光器的频率调谐参数以及信号检测电路输出电压大小,得到频率调谐参数及指标大小如表1所示[11]。
根据式(2),20 m长光纤谐振腔的自由谱线宽度为10.3 MHz。仅采用激光器PZT调谐方式时,1 V的电压变化即可检测到一个完整的谐振曲线,在此过程中通过单独的PZT闭环,即可实现激光器频率对谐振腔谐振频率的跟踪锁定。

图2 典型的透射式谐振输出曲线Fig.2 Typical transmission resonant curve of the fiber ring resonator
在激光器频率控制速度方面,由于PZT的速度响应特点,使用PZT闭环反馈控制能够满足频率跟踪的快速响应需求,而温度的响应速度相对慢得多,但具有调节范围大的优势,因此采用温度控制作为PZT的信号补偿。在激光器频率控制精度方面,PZT电压是通过16位的并行D/A来实现的,24 V电压调谐范围对应的最小调节频率为(24 V/65536)×16.3 MHz/V=5.97 kHz,通过多点采样平滑输出,可进一步提高频率跟踪锁定精度。在激光器频率控制范围方面,PZT可实现391.2 MHz的频率控制,而谐振腔受环境温度的影响高达GHz/℃量级。如果单独采用PZT闭环控制,PZT控制电压容易溢出,导致频率跟踪失锁,因此必须在激光器频率控制中引入温度控制环节。根据表1中的温度调谐范围以及温度调谐系数,可以计算得到采用温度控制可补偿的激光器频率范围可达57.05 GHz,远高于PZT可控制的391.2 MHz频率范围。
在激光器频率锁定控制算法上,首先对频差信号进行解调,得到激光器频率与谐振腔谐振频率的频率偏差信号。将频率偏差信号经过多次累加处理后,反馈控制PZT电压输出,以实现频率的快速跟踪锁定,同时对温度进行控制,以确保锁定的长期稳定性。
PZT控制的数学模型可以表示为一个比例环节,闭环传递控制函数表示为

其中:Gopen为控制开环传递函数,z1−n为系统的传输和数据处理延迟,k0为数字信号处理内部通过累加除法而引起的增益系数,k1为开环传递函数的比例环节增益系数。由传递函数可见,影响锁定精度和稳定性能的因素为n和k0k1。
n值反映延迟时间和数据累加过程中的数字延迟。n越大,系统频率锁定的响应速率就越快,但也越容易出现超调,当延迟时间过长时,系统将不再稳定。在数字信号处理器内部通过控制累加时间有效避免系统超调。k0k1影响频率锁定速度和稳定程度,在调节k0k1实现锁频时,随着k0k1的增加,系统的响应速度越来越快,继续增大将会导致系统超调甚至震荡。k1是固定值,k0通过数字信号处理器的移位次数进行调节。

表1 光纤激光器频率调谐参数Table 1 Frequency tuning parameters of fiber laser
温度控制模型为一阶系统,可表示如下:

其中时间常数T是惯性环节的主要参数,定义为以初始速度等速上升至稳态值所需时间。T越大,温度响应速度越慢,目前光纤激光器温度响应在秒量级。
采用Matlab中的Simulink模块来完成基于温度和PZT协同控制实现激光器频率锁定仿真。Simulink建立的仿真模型如图3所示,用阶跃信号Step表示陀螺角速度变化,一定角速度下FRR通过内部增益Gain3产生与陀螺转速成正比的光频移f,经过光电探测器内部增益Gain1将光频移f转换为反应频偏的方波电压差,通过AD转换为数字量并通过零阶保持器得到解调数字信号data_jt,随后采用数字累加方式实现积分运算,积分后的数字信号data_PZT通过DA增益项控制 PZT电压实现激光器频率控制,形成Out1,其中z-12表示累加运算带来的数字延迟,k0为附加增益,后端通过并行 DA实现数模转换产生电压信号PZT_voltage,并根据激光器接口电路构成形式和PZT调谐系数,进行延迟和增益转换,在Gain环节实现电压-频率转换。另一路上,data_jt的值经过低频采样得到data_PZT,通过零阶保持器并送给温度控制环节,产生温度设定信号T_set,形成 Out2。温度环节通过一个一阶系统进行延迟和转换后经过 SDA构成的Gain4增益项转成模拟量,并通过运算放大Gain2施加到激光器的温度控制端,实现激光器频率补偿。在此过程中不断将激光器实测温度T_act传递给控制系统,同时考虑温度系统的响应延时,避免温度稳态控制误差,实现温度控制的精确性和可靠性。
基于Simulink仿真模型,对阶跃输入条件下控制系统的PZT控制信号Out1和温度控制信号Out2进行仿真分析。可以调整的控制参数有增益项 DA、SDA和数字延迟(Integer delay),在FPGA内部改变上述参数以获得不同的控制结果。对参数不断优化调整,当设定 Gain6和 Gain4增益分别为 0.005、300,Integer delay为12时,PZT和温度控制信号的仿真结果为图4所示,分别为下方曲线和上方曲线所示。可见,当转速发生变化而产生频率偏差时,PZT电压和温度电压会向相反方向变化以实现激光器中心频率对FRR谐振频率的跟踪同步控制。在控制前期,电压幅度会迅速增大到极点以实现激光器频率的快速调谐,由于激光器的温度响应慢,在控制后期PZT和温度电压会逐步回调以确保频率的稳定,在此过程中电压的变化幅度会逐渐减小,最终达到频率锁定的稳定状态,整个稳定锁定时间大约在3 ms以内,待到频率稳定后,PZT和温度控制电压的变化逐步趋于稳定,从而最终达到平衡状态。
3 系统搭建及测试
搭建了如图5所示的光纤激光器频率锁定系统,采用保偏光纤进行光纤谐振腔绕制,光纤长度20 m。采用基于FPGA的硬件处理电路进行频差信号解调、激光器温度/PZT电压闭环反馈、频率锁定控制以及锁定精度输出等功能。
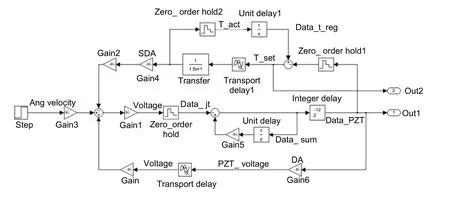
图3 基于温度和PZT协同控制的Simulink仿真模型图Fig.3 Simulation model based on temperature and PZT control
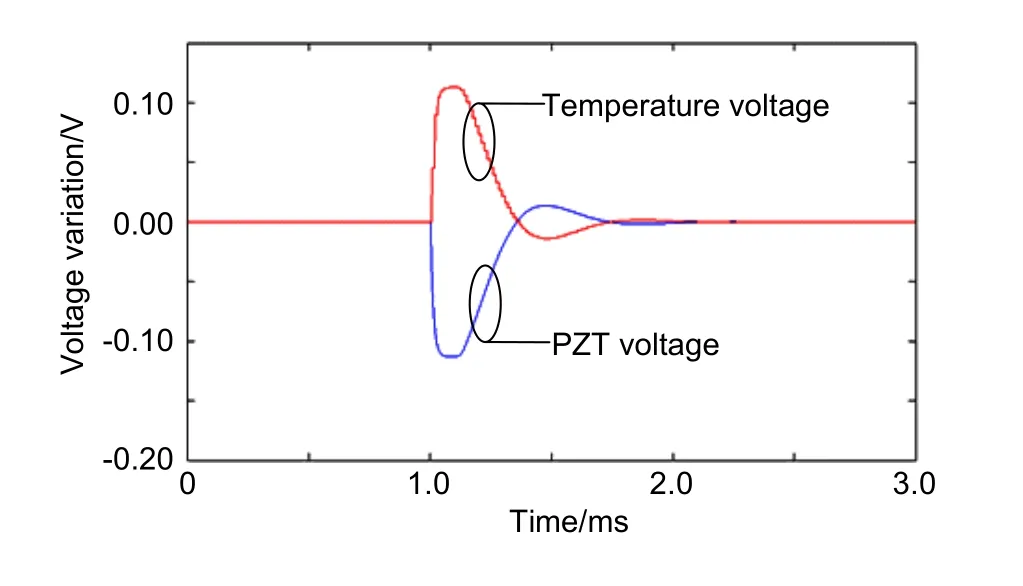
图4 基于温度和PZT协同控制的Simulink仿真结果Fig.4 Simulation results based on temperature and PZT control

图5 光纤激光器频率锁定系统实物Fig.5 Fiber laser frequency locking system
采用激光器频率锁定系统进行了频率跟踪锁定实验研究,测试结果如图6所示。从图中可见,其锁定过程如下:首先信号检测电路发生线性扫频锯齿波施加在激光器的PZT电压端,此时激光器的温度保持恒定,当激光器输出光频率线性扫频通过整个谐振信号时,从探测器输出上将会观察到明显的谐振峰信号,与图2中的仿真结果相吻合。当锁定控制信号到达时,再次接近谐振峰信号一侧时,激光器PZT电压不再线性增大,而是根据谐振频率偏差大小进行闭环反馈控制,从开始闭环到实现频率跟踪锁定(即探测器输出为直流电压信号)仅需要10 ms的时间。为确保锁定效果,激光器的温度设定电压也开始作用以补偿外界温度变化引起的FRR谐振频率漂移,最终通过激光器温度和PZT电压的复合控制,达到频率跟踪锁定的稳定状态。
为验证本文提出的频率跟踪锁定控制系统精度和长期稳定性,需要进行常温条件下激光器频率锁定精度测试。首先对陀螺的标度因数进行速率转台标定,得到陀螺常温标度因数K为142260 °/s。随后进行常温条件下锁定输出测试,若系统稳定,则锁定后探测器端为持续稳定的直流电压,解调后的锁定偏置应该始终在零点附近,而且需要对锁定后波动标准差进行实时采样输出,以衡量常温下的锁定精度。图7给出了锁定路静态测试数据及锁定过程中的环境温度变化情况,其中前1 h和后1 h分别为频率锁定前和锁定后的输出数据,2 h测试时间内外温度的最大变化量在1 ℃左右。当激光器频率锁定控制命令到达前,一旦进入接近谐振中心频率,锁定路输出呈现完整的频率偏差解调曲线(如图中尖峰脉冲所示),当激光器频率锁定控制命令到达后,激光器频率被实时跟踪锁定于谐振腔的谐振频率上,此时锁定路输出并没有明显的尖峰脉冲和漂移,而是稳定地维持在0.56 °/h零偏附近,已经无限接近锁定零点位置。进一步可知,常温条件下激光器的频率锁定精度为4.3 °/h(对应4.8×10-9频率稳定度),能够满足中低精度谐振式光纤陀螺的频率跟踪锁定需求。

图6 光纤激光器频率锁定过程Fig.6 Frequency locking process of fiber lasers

图7 常温条条件下激光器频率锁定输出测试结果Fig.7 Test results of fiber laser frequency locking under normal temperature
为了验证环境温度变化对激光器频率跟踪锁定效果的影响,将光纤谐振腔置于硅油循环浴中进行变温条件下频率锁定输出测试。设定硅油循环浴的温度变化范围为18.5 ℃~31.6 ℃,温变过程中激光器的温度及频率锁定输出测试结果如图8所示。从图中可见:在5.5 h测试时间内,激光器频率跟踪锁定输出稳定,未出现明显的频率跟踪失锁现象,测试激光器频率锁定精度为 87.6 °/h (对应 9.74×10-8频率稳定度),说明基于温度和PZT协同控制的频率锁定方案同样可以实现变温条件下激光器频率对谐振腔谐振频率的长期同步跟踪锁定。

图8 变温条件下激光器频率锁定输出测试结果Fig.8 Test results of fiber laser frequency locking under variable temperature
4 结 论
本文针对谐振式光纤陀螺应用需求,提出一种基于激光器温度和PZT协同控制的频率跟踪锁定控制方案,综合利用激光器温度调谐所具有的大范围、PZT电压调谐的高精度高动态技术优势,实现光纤激光器中心频率对谐振腔谐振频率的跟踪锁定。并进行了透射式谐振信号的数学仿真,对温度和PZT协同控制方案进行了硬件设计和算法仿真,重点分析了频率跟踪锁定方案中控制参数对锁定稳定性的影响情况。完成了激光器频率锁定系统的研制,实现了激光器中心频率对谐振腔谐振频率的跟踪锁定,常温条件下1 h测试时间内的频率稳定度为4.8×10-9,变温条件同样可以实现激光器中心频率对谐振腔谐振频率稳定跟踪锁定,5.5 h测试时间内的频率稳定度低至9.74×10-8。
猜你喜欢
物理学报(2022年23期)2022-12-14
舰船科学技术(2022年20期)2022-11-28
包装与食品机械(2022年4期)2022-09-16
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
电子制作(2018年9期)2018-08-04
制造技术与机床(2017年3期)2017-06-23
电子制作(2016年21期)2016-05-17
长春理工大学学报(自然科学版)(2015年6期)2015-10-12
燕山大学学报(2014年4期)2014-03-11
