
经纬仪跟踪与激光指向一致性问题研究
2020-09-29 06:25贾文武张三喜
光电工程 2020年9期
贾文武,张三喜,雷 涛
1中国华阴兵器试验中心,陕西 华阴 714200;
2中国科学院光电技术研究所,四川 成都 610209

1 引 言
随着激光测距能力的不断提高[1],给光电经纬仪加装激光测距分系统构成激光单站测量经纬仪,实现单站外弹道参数测量能力已成为靶场经纬仪的发展趋势[2]。在测量时经纬仪负责对目标进行跟踪和角度测量[3],同时引导激光测距分系统测量目标的距离,从而实现对目标的单站定位与外弹道参数测量。在此过程中,由于激光光轴与经纬仪跟踪光轴的轴间距离(移轴)和平行性误差的存在,将会导致经纬仪跟踪位置与激光指向位置不一致,从而对激光单站测量产生不利影响。
目前虽然可以通过共轴光路设计的方法,使得激光发射系统与经纬仪主跟踪光学系统共轴[4-5];同时通过精密装调的方法提高激光光轴与经纬仪跟踪光轴的平行性等方法来减小上述误差的影响。但是靶场试验中有时不得不在大移轴、弱平行条件下开展测试工作。首先,靶场经纬仪通常包含测量和捕获两级跟踪系统,共轴设计只能解决其中一个跟踪分系统的移轴问题,当另一个跟踪系统工作时仍然会存在移轴与光轴平行性问题。其次,针对可换负载式经纬仪,激光测距分系统只能安装在经纬仪已有的载物台上,导致激光光轴与经纬仪跟踪光轴的轴间距离难以减小。最后,在外场测试环境下难以具备专门装调设备保证更换后激光光轴与经纬仪跟踪光轴之间严格平行。因此,在实际靶场测试中必需解决大移轴、弱平行条件下的经纬仪跟踪位置与激光指向位置的一致性问题。
综上,对大移轴、弱平行条件下经纬仪跟踪位置与激光指向一致性问题开展研究,在分析移轴与平行性误差的影响基础上,提出了一种基于偏置跟踪的激光指向动态修正方法和针对初始距离未知目标的一维搜索方法,有效解决了激光指向与经纬仪跟踪位置不一致问题。这对于降低激光单站测量经纬仪中激光光轴与经纬仪跟踪光轴的移轴量和平行性要求,并提高激光测距作用距离,降低测距盲区,提高目标定位精度具有重要意义。
2 移轴与平行性误差的影响分析
2.1 移轴影响分析
如图1所示,假设激光发射光轴与经纬仪跟踪光轴完全平行,轴向距离(移轴量)为z0,激光发散角为θ;同时经纬仪稳定跟踪目标且位于跟踪视场中心。显然此时激光光轴指向的目标位置与跟踪光轴指向的目标位置存在一个固定的偏差。由于该固定指向偏差的存在,以及激光光斑尺寸随距离的变化,将导致激光测距盲区。

图1 激光移轴对距离测量的影响Fig.1 The influence of off boresight to range detecting
首先对于小目标,当目标距离较近且激光光斑尺寸小于移轴量时,激光不能照射到位于跟踪视场中心的小目标,从而无法完成距离的测量。随着目标距离的增大,激光光斑尺寸也随之增大,当其半径大于移轴量时(如图1中L3位置),激光能够照射位于视场中心的小目标完成距离的测量。当激光光斑尺寸刚好等于轴间距离时(如图1中L2位置),激光刚好能够照射小目标。此时目标距离如式(1)所示。小于该距离则称为移轴导致的测距盲区。

其次目标尺寸大小也会对测距盲区产生影响。如图1中L1位置所示,目标尺寸越大激光越容易照射到目标。为简化分析,假设目标截面为圆形,半径为r。则此时激光光束刚好能够照射到目标的距离有:
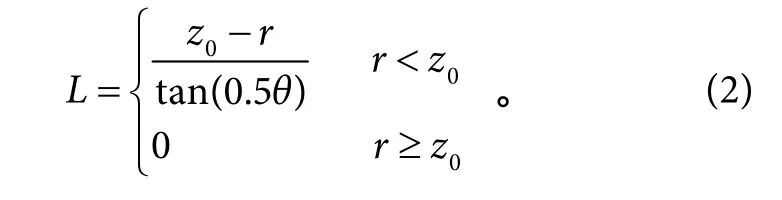
从以上分析可知,移轴将使激光光轴指向和经纬仪跟踪光轴指向之间产生一个固定偏差,使得激光测距位置与经纬仪跟踪位置不一致,并可能引发激光测距盲区。该测距盲区与移轴量、激光发散角以及目标尺寸有关,移轴量越小则测距盲区越小,激光发散角越大测距盲区越小,目标尺寸越大测距盲区越小,当目标尺寸大于移轴量时则不存在测距盲区。
对于靶场经纬仪,其跟踪系统光学成像孔径较大,移轴量也相应较大。如某型经纬仪其光学系统的安装位置与主跟踪系统的距离可达 590 mm,而同时常规靶场中大量的火箭弹、导弹类目标口径很小。比如对于移轴量为590 mm,激光发散角为1 mrad,口径为120 mm的目标,根据式(2)移轴所引起的测距盲区约为1.06 km。显然此时移轴的影响已经不能忽略。
2.2 光轴平行性误差影响分析
显然激光光轴与经纬仪跟踪光轴的平行性误差将导致激光指向位置与经纬仪跟踪位置的不一致,尤其是两者平行性误差较大时,这种指向不一致将会产生较大影响。
一是对于小目标而言,激光光轴与经纬仪跟踪光轴的平行性误差将导致激光测距作用距离的下降。图2中目标1为小目标且位于经纬仪跟踪视场中心,则目标位于激光光束的偏心位置,偏心量为平行性误差。由于激光能量呈高斯分布,位于非光束中心的目标反射的激光能量将减小,当平行性误差与激光发散角相当时,需要考虑其对激光测距作用距离的影响。而对于小发散角的激光光束,在缺乏精密装调条件的靶场试验环境下,必需考虑这种较大的光轴不平行误差的影响。

图2 光轴平行性误差影响示意图Fig.2 The influence of parallelism error
二是对于大目标而言,激光指向位置与经纬仪跟踪位置的不一致将影响对目标的定位精度。图2中目标2为大目标,经纬仪跟踪时锁定目标尾部。由于平行性误差的存在,当目标距离较近时,激光束中心指向目标尾部;随着目标距离的增大,激光束中心逐渐指向目标头部,造成测角位置和测距位置的不一致,从而影响对目标的定位精度。
在实际经纬仪中,激光光轴与跟踪光学系统光轴往往同时存在移轴和不平行。两者叠加导致激光指向位置和经纬仪跟踪位置不一致,最终导致增大激光测距盲区、降低激光测距作用距离和降低定位精度等问题。为此,建立位于激光光束中心且距离为L的目标在经纬仪成像坐标系下的成像位置关系,通过偏置跟踪的方法使得目标始终成像在跟踪视场的特定位置,此时距离为L的目标刚好位于激光束中心,从而达到动态修正激光指向并使得经纬仪跟踪目标位置与激光束指向目标位置始终保持一致的目的。
3 基于偏置跟踪的激光指向动态修正方法
由于经纬仪成像跟踪系统的视场相对激光发散角更大,可以采用偏置跟踪方法使得目标成像在经纬仪跟踪视场的特定位置[6-8],此时,目标刚好位于激光光束中心,从而有效减小激光测距盲区,提高激光测距作用距离,从而实现激光测距位置与经纬仪锁定目标位置一致。
3.1 经纬仪跟踪偏置量
与经纬仪通常以照准轴为基准建立坐标系不同,为讨论方便,以经纬仪跟踪光轴为基准建立坐标系。如图3所示,该坐标系以跟踪光学系统的投影中心为原点,水平向右为z轴正方向,竖直向上为y轴正方向,以跟踪光轴为x轴其指向为正方向,构建右手坐标系。可在试前标定激光光轴与z-y平面相交的交点坐标为(z0,y0),激光光轴相对于跟踪光轴的平行性偏差在水平方向上的角度为α(顺时针方向为正),俯仰方向上的角度为β(逆时针方向为正)。
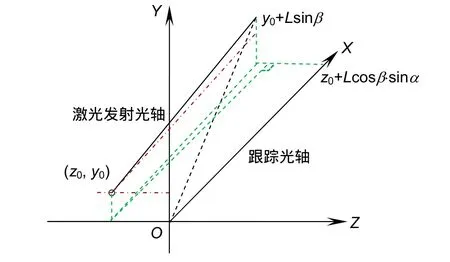
图3 跟踪偏置量计算示意图Fig.3 The offset value of bias tracking
假设目标位于激光光束的中心且距离为L,则可以求得目标在跟踪坐标系下的坐标为
根据光学成像原理,可以求得此时目标在经纬仪跟踪系统中的成像位置坐标为

显然当目标在经纬仪跟踪视场中成像位置满足式(4)时,目标刚好位于激光光束中心,因此式(4)即为经纬仪跟踪过程中需要的偏置角度大小。其中ΔA和ΔE的取值不能超出经纬仪的跟踪视场,将ΔA或ΔE位于视场边缘时对应的距离L值定义为针对小目标的最近测量距离(测距盲区)。由于经纬仪跟踪视场大于激光发散角,因此与偏置跟踪前相比,测距盲区将大大减小。同时由于目标位于激光光束中心,激光能量更高,有利于提高激光测距作用距离。
3.2 经纬仪偏置跟踪流程
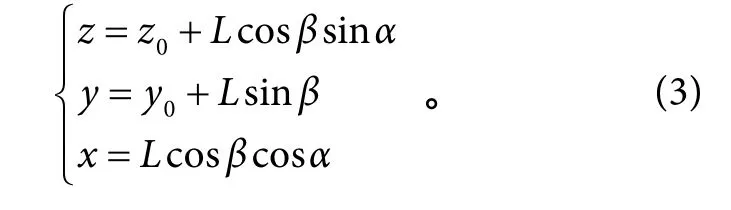
在靶场光电经纬仪跟踪过程中,目标通过光学成像系统成像,图像跟踪器对目标进行检测与识别同时提取出目标的脱靶量(ΔAr, ΔEr)。主控系统根据经纬仪的当前指向的方位、俯仰角度以及目标的脱靶量计算目标的真实位置(合成方位、俯仰角),并将目标的真实位置传递给伺服控制系统。伺服控制系统接收目标的真实位置和经纬仪的指向位置从而控制经纬仪进行跟踪,以尽量使目标的脱靶量减小至零。
为了实现激光测距位置与经纬仪跟踪系统锁定位置的一致性,需要在经纬仪跟踪过程中保持目标位于激光光束的中心而不是跟踪视场的中心。相当于脱靶量是相对于位于激光光束中心的成像位置而不是跟踪视场中心,因此需要对脱靶量进行修正,修正公式为

其中:ΔA、ΔE为根据式(4)计算的目标在跟踪视场中的成像位置。以修正后的脱靶量ΔA′、ΔE′与经纬仪的当前实际指向合成目标的“真实位置”,引导伺服进行跟踪,可使目标位于激光光束中心位置。
为此需要对经纬仪跟踪流程进行改造,改造前后的流程如图4、图5所示。图像跟踪器保持不变,其提取的目标脱靶量输入给主控系统;主控系统接收目标的距离值,在剔除距离野值后计算目标在成像靶面上的成像位置,同时对图像跟踪器输入的脱靶量按照式(5)进行修正;然后根据经纬仪的当前指向方位、俯仰角度以及修正后的目标脱靶量计算目标的“真实位置”(合成方位、俯仰角),并将修正后的目标“真实位置”传递给伺服控制系统。伺服控制系统接收修正后的目标位置和经纬仪指向位置从而控制经纬仪进行跟踪。在此过程中,图像跟踪器与经纬仪伺服控制系统保持不变,只需对经纬仪主控系统进行改造,减轻了改造难度。
图4 改造前经纬仪跟踪流程Fig.4 The tracking procedure of theodolite before rebuilding

图5 改造后经纬仪偏置跟踪流程Fig.5 The tracking procedure of theodolite after rebuilding
4 距离未知目标的一维搜索方法
根据式(4),偏置跟踪的偏置量的设置依赖目标距离的测量。当目标初始距离未知或目标丢失后重新捕获时,如果此时目标刚好出现在激光测距盲区内,则激光测距系统无法测量目标距离使偏置跟踪难以继续。为此,提出针对距离未知目标的一维搜索方法对目标进行搜索使之尽快被激光测距系统捕获。在光电经纬仪搜索目标时通常采用玫瑰扫描、利萨如扫描、逐行扫描、螺旋扫描等搜索扫描路线[9-10],如图6所示。上述搜索扫描路线均在二维方向上进行扫描,扫描时间较长不利于快速捕获目标。
为此,提出距离未知目标的一维搜索方法,加快搜索目标距离的速度。根据式(4),当跟踪光学系统焦距以及激光光轴相对跟踪光轴的移轴、角度偏差确定后,目标在经纬仪跟踪成像靶面中的成像位置仅与目标的距离有关。因此,在搜索过程中可以仅根据距离维度在经纬仪跟踪视场中进行一维搜索,从而可以大大提高搜索效率。

图6 搜索扫描曲线。(a) 玫瑰扫描;(b) 利萨如扫描;(c) 逐行扫描;(d) 螺旋扫描Fig.6 Searching cure.(a) Rose curve scanning,(b) Lissajous curve; (c) Branch scanning; (d) Spiral scanning
首先,对于目标成像位置(角度)上限,根据式(4)可以得到当目标距离趋向无穷大时,位于激光束中心的目标在跟踪系统中的成像角度ΔA极限值为水平方向上的偏差α,ΔE的极限值为俯仰方向上的平行度偏差β。
其次,于目标成像位置(角度)下限,根据式(4),目标距离趋向零时,位于激光束中心的目标在跟踪系统中的成像角度ΔA趋向±π/2。但是经纬仪跟踪系统的成像视场较小,搜索位置不能超出经纬仪的跟踪视场。因此设定目标在距离跟踪视场边缘约激光发散角的1/4视场角时,重新从视场中心开始搜索,一方面避免造成目标丢失跟踪失败,另一方面当目标运动到可测距区间时能够快速启动激光与经纬仪联合测量。
最后,于搜索路径,尽管成像位置仅与距离有关,是其与距离是非线性函数,因此对搜索路径进行改进。对水平方向的成像位置进行线性取值ΔAi,根据式(4)计算对应俯仰方向上的成像角度值ΔEi,减小非线性对搜索的影响;在此基础上根据式(5)对脱靶量进行修正:

5 实验验证
以某型光电经纬仪为基础对本文方法进行初步验证。该经纬仪具有如图7所示三个载物台,分别装有可见光测量跟踪、红外测量跟踪、红外捕获跟踪三个成像光学系统。其中,可见光测量跟踪与红外测量跟踪系统在经纬仪回转中心上下分布,红外捕获跟踪在经纬仪回转中心右侧分布。可根据需要将其中一个成像分系统更换为激光测距分系统,以实现对运动目标的距离测量和单站外弹道参数测量。

图7 某型光电经纬仪负载分布图Fig.7 The loads of a kind of theodolite
由于缺乏短波相机对1550 nm激光光斑成像,按照光路可逆原理用红外测量系统的成像视场模拟激光测距系统的激光光束。如图 8(a)所示,以红外测量跟踪系统的成像光轴代表激光光轴(图中红色十字丝中心),以合适的成像视场代替激光发散角(图中红色圆圈范围约1 mrad),模拟激光对目标的照射情况。实验时,将红外测量跟踪系统对准距离为627.8 m的方位标,其十字丝中心的目标位置即为激光光轴指向位置,通过判读其在可见光测量跟踪系统和红外捕获跟踪系统中的成像脱靶量,与本文的理论跟踪偏置量计算结果进行比较,证明偏置量理论计算的正确性。
其中,可见光测量跟踪系统的成像如图8(b)所示,其中红色十字丝为跟踪视场中心,蓝色十字丝为判读的目标成像位置,对应脱靶量为(-62.7″,-158.9″)。将“激光光轴”相对于可见光测量跟踪系统的光轴平行性偏差(-60.5″,-62.6″)、移轴距离(0,-0.287 m)、目标距离627.8 m带入式(4),可得跟踪偏置量(成像位置)为(-60.5″,-156.9″),与实际判读结果在误差范围内一致。两者不一致则主要是由于判读误差引起。图中蓝色圆圈为方位标位置处的激光光斑大小,此时传统跟踪时将目标置于视场中心(红色十字丝)处时,激光光斑将不能照射成像尺寸小于红色十字丝中心至蓝色圆圈的小目标。
红外捕获跟踪系统的成像如图 8(c)所示,其中红色十字丝为跟踪视场中心,蓝色十字丝为判读的目标成像位置,对应脱靶量为(-165.0″,-41.2″)。将“激光光轴”相对于可见光测量跟踪系统的光轴平行性偏差(23.3″,3.7″)、移轴距离(-0.59 m,-0.137 m)、目标距离 627.8 m 带入式(4),可得跟踪偏置量(成像位置)为(-170.5″,-41.3″),与实际判读结果在误差范围内一致。从而验证了关于移轴与不平行性误差的影响及跟踪偏置量的计算方法。

图8 激光束中心目标成像位置。(a) 模拟激光束及激光光轴指向;(b) 可见光成像系统中的成像;(c) 在红外捕获系统中的成像Fig.8 The imaging location of target in center of laser beam.(a) Simulating laser beam and its pointing;(b) The imaging location in visible imaging system; (c) The imaging location in infrared capture system
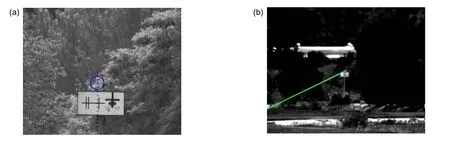
图9 搜索路径。(a) 可见光测量跟踪系统搜索路径;(b) 红外捕获跟踪系统搜索路径Fig.9 Searching path.(a) Searching path for the visible imaging system; (b) Searching path for the infrared capture system
同样,红外测量跟踪系统位置作为激光测距系统安装位置,对于可见光测量跟踪系统其成像视场为0.627°×0.470°,激光发散角为 1 mrad,则如果以搜索步长为 1/4激光发散角(0.0143°)来绘制初始距离未知目标的搜索路径,结果如图 9(a)所示。从图中可以看出,搜索路径经过了方位标距离处的目标。可以根据式(1)计算出边缘位置处的搜索点对应的目标距离为82.0 m,大大降低了大移轴弱平行条件下的测距盲区。同时,在上述成像视场和搜索步长的条件下,由于仅需搜索从中心视场到边缘视场的一维搜索,故如果按照搜索步长搜索位置,则可近似计算为(0.470°/2)/0.0143°=16个位置,并减去距离视场边缘1/4激光发散角停止搜索的一个位置,因此仅需搜索15个位置。而如果是相同视场和步长条件下逐行扫描的二维搜索算法,需要在全视场范围内进行二维搜索,需搜索位置数约为 0.627°/0.014°=44 列,0.470°/0.014°=33 行,即44×33个位置。随着成像视场的增大,二维搜索算法需要搜索的位置近似呈平方数增长。
对于红外捕获跟踪系统,其成像视场为3.7°×2.9°,搜索步长仍然为1/2激光发散角,绘制初始距离位置目标的搜索路径如图9(b)所示。可见搜索路径经过了方位标距离处的目标,其中可以计算边缘位置处的搜索点对应的目标距离为18.6 m,大大降低了大移轴弱平行条件下的测距盲区;与可见光测量跟踪系统分析类似,此时仅需搜索约128个位置,大大提高了搜索效率。
6 结 论
针对现有经纬仪改造、可换负载式经纬仪在加装激光测距时需要在大移轴、弱平行条件下测量无人机、火箭弹等目标外弹道参数的情况,分析了激光光轴相对经纬仪跟踪光轴的轴间距离(移轴)及平行性误差的影响。分析表明,移轴与平行性误差将会导致激光指向与经纬仪跟踪的不一致,进而导致激光测距盲区、降低激光测距作用距离、降低目标定位境地。其中移轴将导致对小目标的测距盲区,移轴量越大测距盲区越大。平行性误差将降低激光测距的作用距离,同时测距位置随着目标距离变化而变化,从而降低目标定位精度。针对上述问题,提出了一种基于偏置跟踪的激光指向动态修正方法,通过偏置跟踪使目标始终位于激光光束中心而不是跟踪视场中心,有效解决了激光边缘能量下降对作用距离的影响。针对某型经纬仪,该方法可使目标的测距盲区从1 km下降到82 m,约一个数量级,并且实现了激光测距位置与跟踪锁定位置的一致,从而有利于提高定位精度。由于偏置跟踪算法需要目标初始距离以启动偏置跟踪,但是当初始目标位于测距盲区内时则无法测量目标的距离,因此针对该问题,提出初始距离未知目标一维搜索方法,大大提高了对初始距离未知目标的搜索效率,有效解决了大移轴弱平行条件激光指向与经纬仪跟踪的一致性问题。这对于降低激光单站测量经纬仪对激光光轴与经纬仪跟踪光轴移轴量与平行性限制,提高外弹道测量精度具有重要意义。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
计测技术(2018年5期)2019-01-07
电脑爱好者(2018年17期)2018-11-05
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
百科探秘·航空航天(2016年9期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
中国高新技术企业(2015年25期)2015-07-24
