
固定翼航模智能飞行控制系统
2020-09-28 09:19薛昕惟黄彦淳夏秋粉
实验技术与管理 2020年5期
薛昕惟,黄彦淳,王 祎,夏秋粉
(大连理工大学 国际信息与软件学院,辽宁 大连 116600)
无人机有着比较久远的发展历史,它的诞生可以追溯到1914 年。到目前为止,无人机经历了以下四个发展过程:无人驾驶无人机、预编程控制无人侦察机、遥控指挥远程无人侦察机以及具有复合控制的多用途无人机[1-3]。无人机技术的发展使无人机更加广泛地进入现代人的日常生活。世界上领先的互联网公司也已经参与到无人机市场竞争当中。现在,无人机已应用于许多行业如城市管理、农业、地质、气象、电力、救灾等。但是在我国,军用和民用无人机的发展仍然存在着不平衡的状况[4]。
四轴飞行器在图像采集、玩具等领域应用广泛,但固定翼无人机仅军用较为广泛,使用门槛一直过高,将固定翼飞行器推广至商用及民用极具现实意义[5]。
在无人机系统的设计中,控制系统始终是最重要的部分,它如同无人机的大脑[6-7]。无人机完成自主飞行,需要飞行控制系统能够较好地控制飞行姿态、高度和速度。设计优良的飞行控制系统对提高无人机的整体性能具有十分重要的现实意义。在工程实现方面,固定翼自动导航飞机是目前无人飞机发展的主流方向,基于成本控制及可实施性,本文采用单片机为核心构建固定翼航模飞行控制系统。
固定翼航模飞行控制系统包括机上飞行控制系统、无线通信系统和遥控操控系统,因此飞行控制系统设计包括以上三个子系统的硬件电路设计和程序编写。
飞行控制系统需要实现三大功能:①遥控远程操控下飞行功能;②稳定飞行功能;③安全保护功能。遥控远程操控下飞行指的是固定翼航模在遥控模式下,能够执行一般的飞行指令如提升(或降低)高度、转向、起降等。稳定飞行指的是固定翼航模在自平衡模式下,能够抵抗外来干扰,并保持平稳直向飞行。安全保护指的是无人机在紧急情况下能够规避障碍物及防止坠落等[8]。
本文系统采用的主控制芯片、无线传感模块、传感器等均遵循低成本的原则,而整个系统软件编程实现及自平衡算法设计均自主完成,从而达到以远低于市场上的航模飞控价格,驱动基本所有的固定翼航模的目标。
1 系统总体设计
1.1 总体功能结构
本固定翼航模飞行控制系统(见图1)共包括五个子模块:①飞控主控模块;②姿态控制模块;③摇杆控制模块;④无线传输模块;⑤姿态传感模块。

图1 总体功能结构图
飞控主控模块具备五个功能:①监控实时飞行姿态;②发送飞行控制指令;③接收无线传输数据;④执行控制算法;⑤死机时快速重启。姿态控制模块具备三个功能:①接收数字控制指令;②转化数字指令;③姿态实际物理调整。遥感控制模块具备三个功能:①接收物理控制指令;②将物理指令数字化;③发送数据信息。无线传感模块具备三个功能:①接收遥控数据信息;②建立无线数据连接;③传输指令数据。姿态传感模块具备三个功能:①收集物理飞行数据;②飞行数据数字化;③传送飞行信息数据。
1.2 系统硬件设计总思路
系统总体架构为主从式,分为遥控硬件模块与飞行控制硬件模块两个部分。硬件设计总体框图如图2所示。两个硬件模块分别拥有独立的主控芯片和无线传感模块,模块之间进行单向数据传输。遥控硬件模块拥有数据采集和数据传输功能,飞行控制硬件模块拥有数据接收、数据采集和执行操作功能。
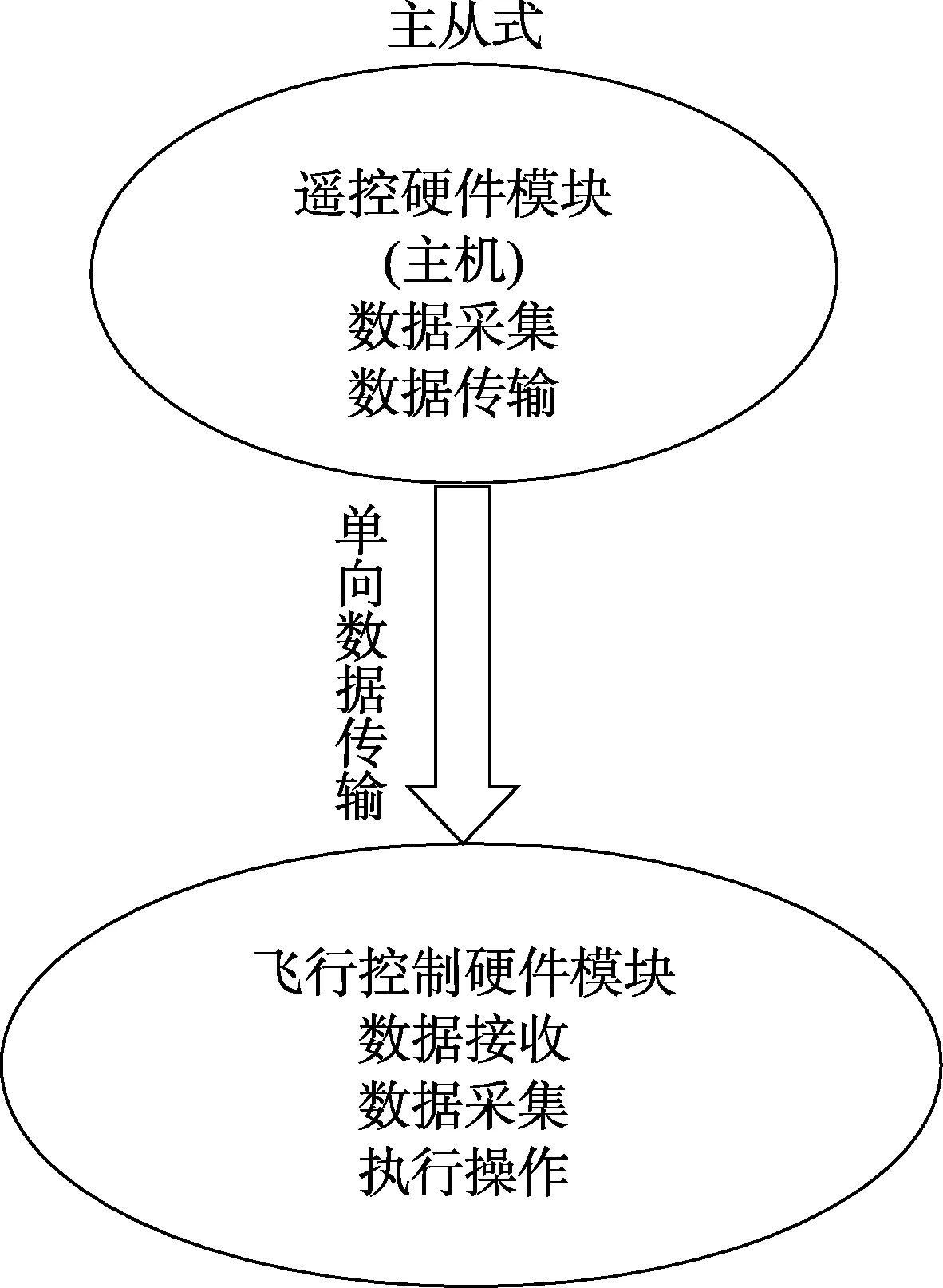
图2 系统硬件设计总体框图
1.3 系统硬件框架
系统硬件框架如图3 所示,分为控制源、自驾仪、被控对象三个部分。控制源一般是遥控器;自驾仪包括机上控制单元、陀螺仪、加速度计等;被控对象包括副翼、电机、升降舵、方向舵等。控制源与自驾仪之间通过无线通信进行连接,自驾仪则通过脉冲宽度调制(PWM)对被控对象进行操控。
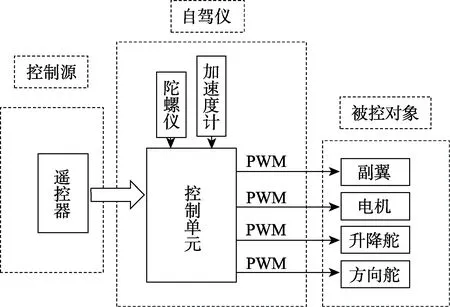
图3 系统硬件框架图
2 模块硬件选择
2.1 飞控主控模块
采用STM32F030C8T6[9]作为主控芯片,其片内集成16 kB 程序Flash、2 kB 运行内存,自带12 位AD转换和SPI。经过实验,48 MHz 的运算速度可以在20 ms 内完成运算及数据采集任务,运算能力绰绰有余。
该元件属于新型产品,功耗低,价格低,十分符合嵌入式系统对功耗的要求。该单片机的性能及引脚数量与本文的设计要求基本符合,飞控使用了全部的引脚,可以用Linux 作为上位机来进行复杂的控制;其自带的2 kB 运行内存基本满足算法的内存需求。本系统采用了通用的航模控制协议,使得飞控主控模块可以适用于各种航模。
2.2 姿态控制模块
采用4 个舵机分别独立调节左右主机翼、副翼及尾翼,使用无刷电机和电调提供稳定的动力输出。
2.3 摇杆控制模块
采用STM32F030F4P6[10]作为主控芯片,该单片机的性能及引脚数量与本文的设计要求基本符合,可以引出一对SWIM 接口和一组串口,使用Linux 作为上位机来进行复杂的控制。
左摇杆控制油门强度和调节尾翼角度来平衡飞机姿态,右摇杆控制主机翼的偏移角度和副翼的升降来控制飞机的飞行姿态。
2.4 无线传感模块
采用SI4463[4],比SI4432 性能更强(功耗降低、功率增强),频率范围为315~915 MHz。航模操控需要远距离信号传输,该模块信号传输距离可达到2.4 km,并且433 MHz 信号的绕射能力远远强于2.4 GHz 信号,在不涉及图像传输的情况下200 kB/s 的传输速度也完全足够。
2.5 姿态传感模块
采用MPU-6050 六轴传感器[11],其角速度全格感测范围为±250、±500、±1 000 和±2 000 °/s[12],可准确追踪快速和慢速动作,并且用户可控制的加速器全格感测范围为±2、±4、±8 和±16g。可通过最高至400 kHz的I2C 总线传输数据,完全符合本文对传感器的要求,能够较为准确地得到自平衡算法所需要的输入值。
3 硬件电路设计
3.1 抗干扰设计
进行数模隔离,关键部位添加滤波电路,每个输入引脚增加独立滤波电容,电源使用稳压IC 与470 uF电容来确保电源波纹最小化,进而提高系统的抗干扰能力。
3.2 飞控主控及外围电路
电路原理图和实物分别如图4 和5 所示。
3.3 摇杆控制及外围电路
电路原理图和实物分别如图6 和7 所示。
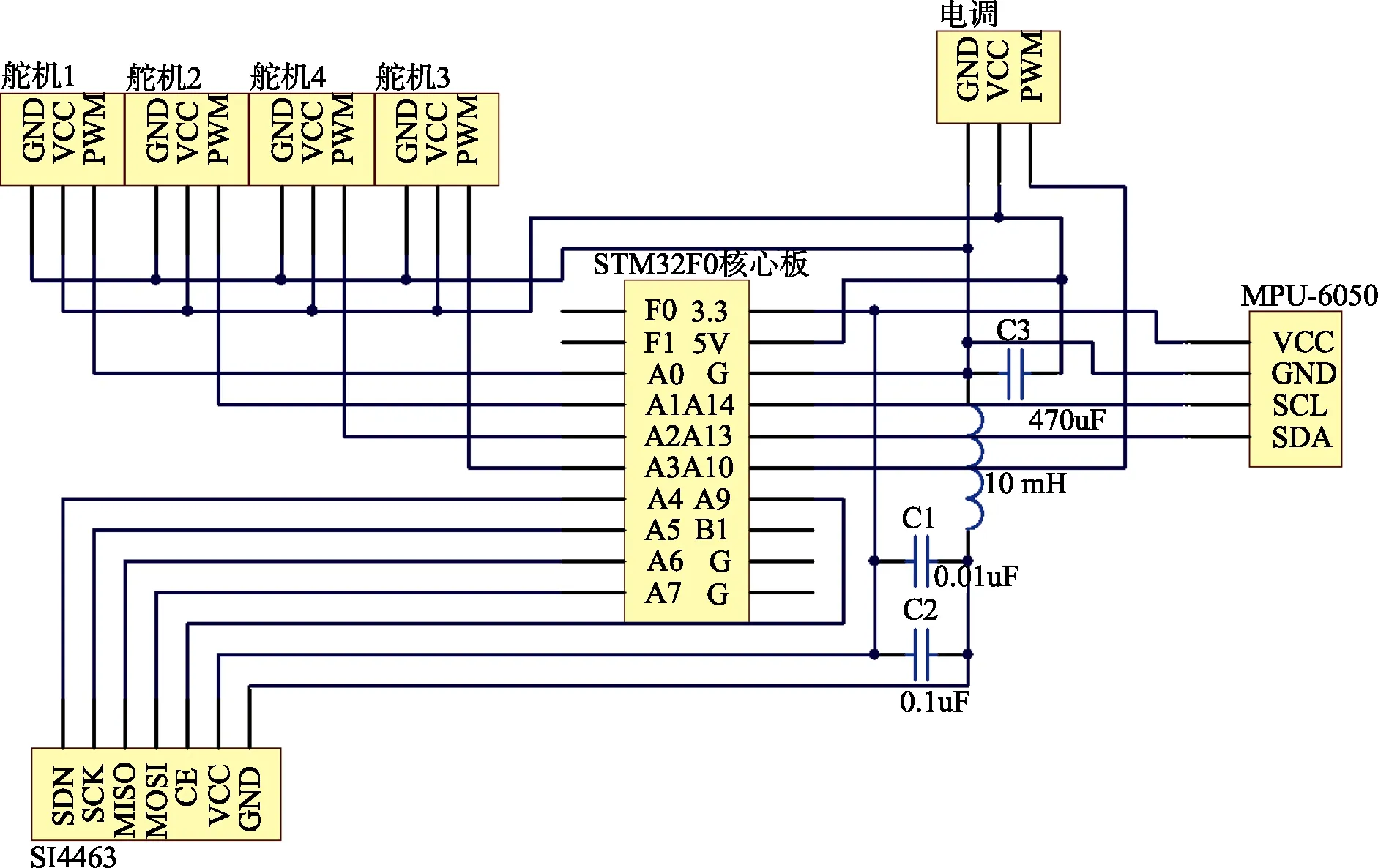
图4 飞控主控及外围电路原理图

图5 飞行控制电路板实物
图6 摇杆控制及外围电路原理图
图7 摇杆控制电路版实物
4 基础程序设计
4.1 遥控控制模式
遥控控制模式下,系统程序流程如图8 所示,主要分为两部分:遥控控制部分和机上飞控部分。遥控控制部分主要包括初始化和无线控制数据采集及发送,机上飞控部分主要包括初始化、无线控制数据接收和对舵机及电机进行操作。

图8 遥控控制模式下程序流程图
4.2 稳定飞行模式
稳定飞行模式下,系统程序流程图如图9 所示,主要分为两部分:初始化部分和循环部分。前者是指初始化MCU 各个功能,并初始化各模块寄存器的值;后者是指通过不断接收主机传输过来的控制量来确定舵机的偏转角度,并在主机不操作情况下进行自平衡算法运算来实现航模的稳定飞行。
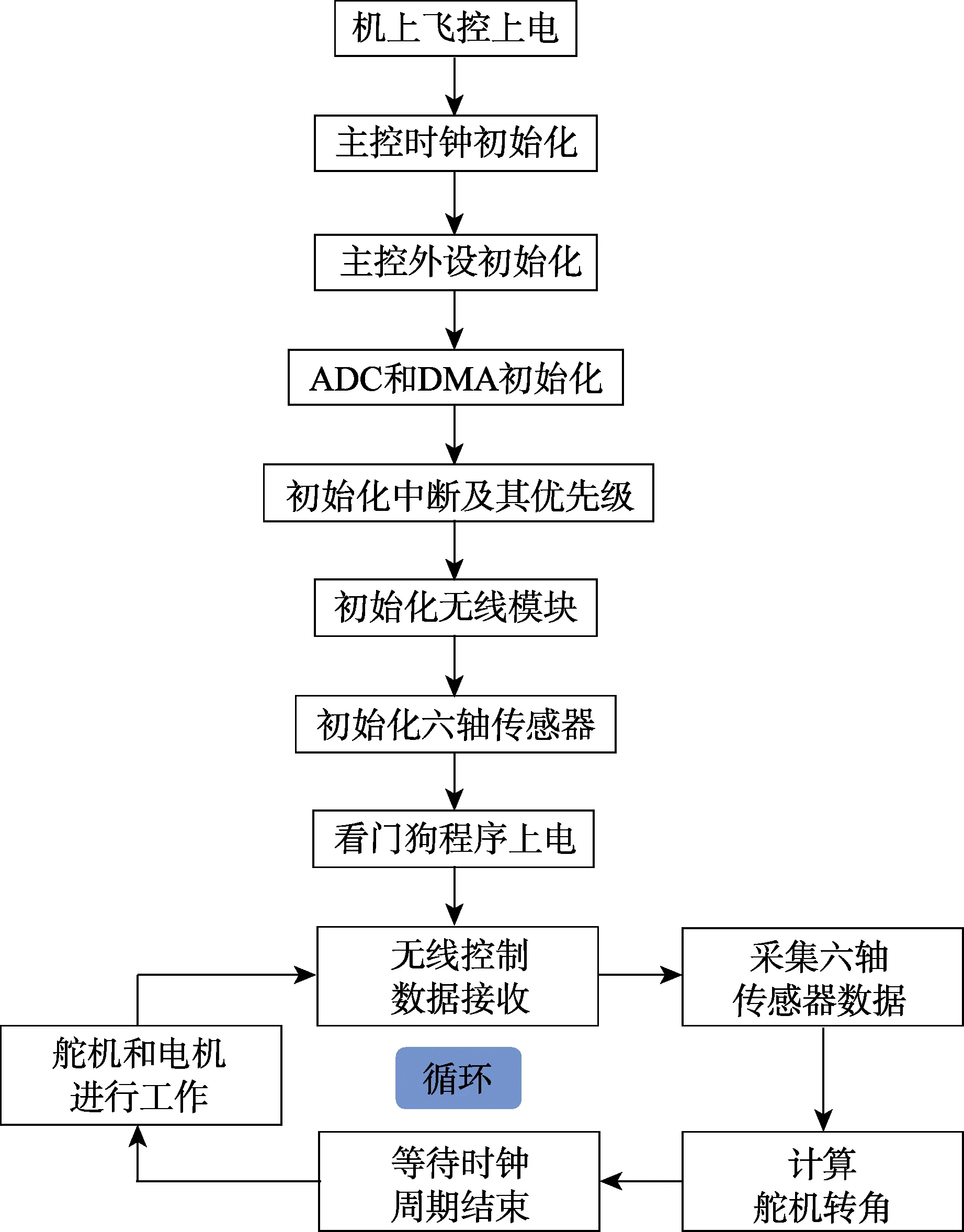
图9 稳定飞行模式下程序流程图
5 控制算法设计
5.1 遥控控制模式
先对摇杆进行采样,并根据电压划分成0~255。由航模控制标准可知右摇杆的X 轴控制倾角,Y 轴控制前后主副翼;左摇杆的X 轴控制尾翼,Y 轴控制油门。
5.2 角度输出算法设计
陀螺仪部分:陀螺仪得到的角速度为实际角速度在各个轴上的正交分解量,将各轴上的角速度与取样时间相乘可得到每个取样时间内的角度变化,将每段取样时间内的变化量相加即可得到当前各轴的偏转角度。
加速度计部分:速度变化时,加速度计得到的加速度为实际加速度在各个轴上的正交分解量,计算actan(ax∕az)便可得到加速度计x 轴与水平面的夹角,同理可得加速度计y 轴与水平面的夹角,进而确定系统当前状态。
当由加速度计得出最初角度后,再叠加由角速度积分出来的角度即得到现在的状态,但考虑到噪声等的影响,在特殊情况下进行修正以减小陀螺仪的误差。当测出的加速度与重力加速度大致相同时,则将由陀螺仪得到的除水平旋转角之外的角清零(方便PID 算法使用),这样一定程度上减少了积分的偏差。
5.3 角速度滤波算法的设计
采用信号与噪声的状态空间模型[13],利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,从而求出现时刻的估计值。过程如下:①预估计;②计算预估计协方差;③计算增益,更新估计;④计算更新后估计协方差;⑤重复以上步骤。
5.4 PID 算法的设计
只采用了PID 算法[14-15]中的P(比例),而没有引入I(积分)和D(微分),由陀螺仪算出的角度直接传入PID 算法,根据比例运算直接得到舵机应偏转的角度,进而实现自平衡。为了使舵机反应快速,将比例P 设定为较大数值以提高其灵敏性,并引入范围控制来防止输出值过大使舵机反偏。
6 结语
本文设计完成的固定翼航模智能飞行控制系统装载在市面上现有的固定翼航模上,即可完成一定的飞行任务,如作为有娱乐功能的遥控飞行器。同时,自平衡稳定飞行功能的存在,使固定翼航模能够在一定的复杂环境下完成自主飞行。
无人机在民用各个领域有着广阔的应用前景,而本系统作为一款低成本、高性能、高鲁棒性的固定翼航模通用飞控系统,具有较高的发展潜力,对实现完整的固定翼无人机飞行控制系统具有较高的参考意义。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年7期)2019-04-25
中国公共安全(2017年7期)2017-10-13
计算机测量与控制(2017年6期)2017-07-01
航空模型(2016年10期)2017-05-09
中南大学学报(自然科学版)(2016年2期)2017-01-19
舰船科学技术(2016年1期)2016-02-27
