城轨车第三轨廓形快速追踪算法研究及应用
2020-09-27 01:19赵鑫欣王胜春王昊杜馨瑜赵延峰蒋曙光
铁道建筑 2020年9期
赵鑫欣 王胜春 王昊 杜馨瑜 赵延峰 蒋曙光
(1.中国铁道科学研究院集团有限公司基础设施检测研究所,北京 100081;2.北京铁科英迈技术有限公司,北京 100081)
在我国城市轨道交通牵引供电系统中大部分线路采用了接触轨方式供电(又称第三轨)。第三轨供电方式具有安装方便、单位电阻小、节省能耗等优点,因而得到广泛应用。
第三轨系统中集电靴与接触轨的良好接触是列车稳定运行的前提,接触界面既制约着列车运行速度,也影响供电的稳定性。因此,建立第三轨廓形检测系统车载平台,有助于分析第三轨的高低和水平距离,为线路维修和养护提供科学依据[1-2]。本文介绍基于时空上下文信息的快速追踪算法及其在第三轨廓形检测系统中的应用。
1 第三轨廓形检测系统
第三轨廓形检测系统是城轨车牵引供电系统的重要子系统(图1),其直接影响到地铁供电系统甚至城轨车的安全运营。
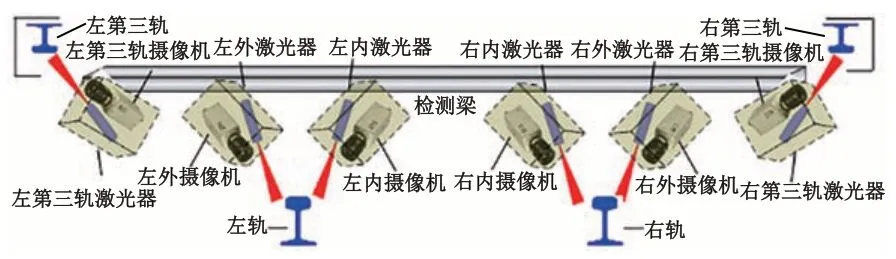
图1 第三轨廓形检测系统结构
该系统以车体为载体,其与走行轨摄像组件安装在转向架端的同一检测梁上,用于检测轨道左侧或右侧的第三轨。第三轨廓形检测系统按0.25 m 间隔输出触发信号控制摄像组件采集第三轨图像,然后处理图像内容并输出第三轨轨距点和轨顶点测量结果,最后合成第三轨几何参数进行距离超限判断。第三轨与走行轨之间相对位置关系如图2所示。
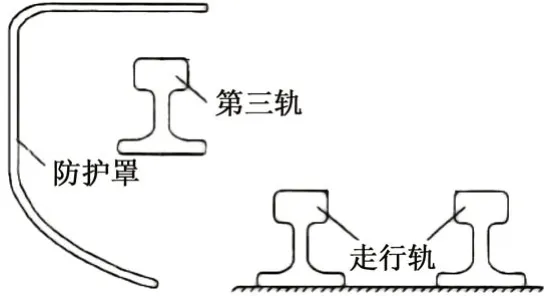
图2 第三轨与走行轨相对位置
对第三轨廓形的快速准确追踪是影响廓形检测和分析的关键问题之一。城轨车运行过程中因经过轨道不平顺、小半径曲线段等区段,车体会产生六自由度方向强振动(图3),包括垂直钢轨方向的摇头和沉浮、沿轨道纵向的点头和横摆、沿轨道横向的伸缩和侧滚振动。

图3 车体六自由度强振动示意
第三轨廓形检测系统基于结构光测量原理。高速摄像机按一定角度和高度对第三轨廓形进行拍摄,摄像机拍摄视野不固定且变化非常大,导致采集图像内容复杂多变,不仅包含第三轨廓形光条,还可能包含线路、绝缘子、防爬器、防护罩等线路设备。还需要解决因车体六自由度强振动和光照变化而导致的图像噪声,致使追踪目标特征形态缺失和畸变。
2 快速追踪算法
2.1 第三轨图像采集
轨道左右两侧只有一侧存在第三轨,所以检测系统需要实时判断第三轨所在位置,并将没有第三轨的一侧进行归零处理。
将摄像机抓拍的第三轨内侧图像计算处理得到轨距点和轨顶点位置,再结合第三轨参数,最终得到第三轨的水平和垂直距离。采集的每帧图像大小为2 048×1 088,强振动行车环境下第三轨横向移动范围约30 mm,垂向移动范围约90 mm。
2.2 目标特征描述子的选取
第三轨的轨距点不受车体强振动、第三轨结构变化和外部光照变化等影响,可以准确可靠地描述第三轨廓形目标特征。因此,选取第三轨的轨距点作为目标特征描述子。
2.3 基于时空上下文信息的快速追踪算法
常见的目标追踪算法有训练分类器[3]、均值漂移算法[4]和机器学习[5]等。快速追踪算法基于连续帧目标及其周围场景存在着的时间和空间关系设计。时间信息可以反映相邻帧间目标和位置的变化,且不会发生突变。空间信息可以反映目标和目标周围背景存在的特定关系,当目标外观发生很大变化时,这种关系可以帮助区分目标和背景,这2种信息组合在一起就是时空上下文信息。该算法首先基于第三轨廓形结构先验信息在图像中指定轨头区域作为起始目标区域,再根据贝叶斯概率模型构建轨头区域置信图(图4),最后计算置信图的最大极值点并持续追踪轨头区域。

图4 第三轨廓形
与现有追踪算法相比,该算法有2 个显著优势:①执行效率高。因为仅选取第三轨轨头作为目标区域,避免了全图遍历计算过程,追踪目标置信图处理时间仅为1.3 ms 左右。②适应能力强。该算法对环境光变化和图像内容变化不敏感,并且可以持续更新轨头目标区域。
2.4 基于最近点迭代的廓形匹配算法
运用最近点迭代算法完成目标区域追踪后,还需要提取追踪区域内的轨头数据计算轨距。由于追踪区域内数据较少且第三轨形状简单,可快速完成廓形匹配和提取目标特征。使用追踪目标区域内的激光条纹数据,沿着每个数据点的法线方向提取激光光带中心点坐标,并与标准廓形数据进行最近点迭代匹配。
城轨车强振动运行过程中,即便轨头数据与标准廓形数据差异较大且匹配点距离较远,轨头数据与标准廓形数据仍然可以准确匹配。
3 应用验证
在城轨车强振动运行情况下,采用基于快速追踪算法的第三轨廓形检测系统对多条城轨线路第三轨进行现场检测,并将检测结果与现有追踪算法(均值漂移算法)所得结果进行对比。
结果准确率Acc计算方法为

式中:Rg为手工标注的目标位置矩形区域面积;RL为追踪方法得到的目标区域面积。
如果Acc≥0.85,则追踪结果正确。

图5 现场检测结果与现有追踪算法所得结果对比
现场检测结果与现有追踪算法所得结果对比见图5。虚线矩形区域为现场检测结果,红线矩形区域为现有追踪算法计算结果。可以看出,现有追踪算法在城轨车强振动和受阳光干扰情况下,追踪结果会出现漂移和追踪错误现象。尤其城轨车经过轨道不平顺和小半径曲线段时会产生车体六自由度强振动,摄像机拍摄视野发生大范围移动导致所采集的图像内容复杂多变,无法准确追踪第三轨。而基于时空上下文信息的快速追踪算法是依据贝叶斯概率模型构建的目标区域置信图,充分考虑了第三轨廓形结构的先验信息,可以适应不同运行条件和外部光照环境,有效克服强振动和受阳光干扰带来的复杂图像内容和图像噪声,可以不断更新追踪目标置信图并持续准确追踪,不会出现追踪漂移和追踪错误的现象。
强振动和受阳光干扰2 种情况追踪结果对比见表1。

表1 追踪结果对比
由表1可以看出:强振动、受阳光干扰情况下追踪结果准确率分别为99.9%,99.5%。左右两侧第三轨廓形追踪定位时间≤2 ms。每秒最多可采集和处理500 幅图像,而现有追踪算法每秒最多可处理350幅图像,左右两侧第三轨廓形追踪定位时间是2.8 ms。执行效率提高约30%,可以满足城轨车第三轨廓形检测系统最高运行时速160 km 的检测要求。
4 结语
采用基于时空上下文信息的快速追踪算法的第三轨廓形检测系统在多条城轨线路应用。结果表明,检测系统可有效克服因车体晃动和外部光照变化带来的影响,同时兼顾了廓形检测的实时性要求,准确率≥99.5%。
猜你喜欢
大电机技术(2022年5期)2022-11-17
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
铁道通信信号(2020年4期)2020-09-21
天天爱科学(2020年6期)2020-09-10
作文小学中年级(2020年6期)2020-07-24
疯狂英语·新读写(2020年3期)2020-06-06
铁道通信信号(2020年10期)2020-02-07
山东工业技术(2016年15期)2016-12-01
城色in生活(2013年3期)2013-07-02