基于Simulink的小型离网风光互补控制器仿真研究
2020-09-23 08:20田相鹏廖红华刘三军余铮术王晋鑫
湖北民族大学学报(自然科学版) 2020年3期
田相鹏,廖红华,刘三军,余铮术,王晋鑫
(湖北民族大学 信息工程学院,湖北 恩施 445000)
风能和太阳能作为两种互补性较强的能源,在电网资源匮乏的偏远山区得到越来越多的应用[1].目前,国内外学者在风能、太阳能等新能源领域的研究主要集中于大型并网发电场及单独风力发电和单独太阳能光伏发电的控制,对于小型独立的风光互补发电系统涉及的相对较少[2-3],所采用的方案也较为复杂,从电路拓扑结构来看,光伏发电的DC-DC电路和风力发电的AC-DC电路结构多样化[4],难以实现可伸缩性的扩容或者升级;从软件方面来看,核心的MPPT算法较多,复杂度也较高[5],提高了控制器的成本.这就限制了小型风光互补控制器的快速发展.
针对以上问题,从实际应用来考虑,本文的风光互补控制器直流变换环节均采用Buck-Boost拓扑结构,统一的电路结构可以快速的实现系统的扩容和升级.光伏发电部分的MPPT算法采用改进的分段自适应变步长MPPT算法,风力发电部分的MPPT算法采用基于系统输出功率的爬山搜索,在满足应用的同时可极大简化系统的输入参数和复杂度.
1 系统结构与理论分析
1.1 风光互补发电系统结构
离网型小功率风光互补功率控制器总体结构如图1所示,系统主要由发电部分、电能变换部分和电能存储消耗环节三部分组成.发电部分由风力机和光伏板构成;电能变换部分由DC/DC变换器构成,通常光伏板发电的DC/DC变换电路采用Buck电路,风机发电采用Boost电路[6-7],采用不同的拓扑结构可以充分利用该拓扑电路的优势;电能储能和消耗部分为储能电池和负载构成.

图1 风光互补电路结构图Fig.1 Wind-solar complementary circuit structure
1.2 理论分析
光伏电池组件将太阳能转化为电能,其输出功率是关于光照度强度、器件结温的相关函数.光伏电池输出方程[8]为:
(1)
式中I0为二极管饱和电流;q为电荷量;A为二极管质量因数;K为波尔兹曼系数.可以推导出如图2(a)所示的光伏电池输出特性曲线[9].可以看到光伏电池的P-V曲线为为单峰值函数,存在最大功率输出点.在Pmax附近,利用在最大功率点左右的曲线斜率正负值不同来进行最大输出功率跟踪.

(a)光伏电池输出特性曲线 (b)风能利用系数曲线图2 MPPT算法原理曲线Fig.2 The MPPT algorithm principle curve
风力机从自然风能中吸取能量的程度用风能利用系数Cp表示,可以根据数值近似计算的方法,得到Cp的计算公式[10]:
(2)
式中λ为叶尖速比,β为风轮桨距角,其中λi满足:
(3)
从式(2)和式(3)可以得到Cp-λ的曲线,如图2(b)所示.在特定风轮桨距角的情况下,存在一个最优的叶尖速比λ使得风能利用系数Cp最高,即风力机的输出功率最大.因此,可以采用控制风机的叶尖速比实现风力机的MPPT,但是这种方法需要测量风速、风力机转速、风力机输出功率等参数,会增加系统复杂性.可以通过公式推导证明[11],在风力机的最大输出功率点,系统输出功率P与Buck-Boost变换电路的占空比D存在dP/dD=0的关系,也即是可以直接通过测量系统的输出功率来进行MPPT算法实现.
2 风光互补系统建模
2.1 电路拓扑建模
小型离网风光互补系统的Simulink[12]模型如图3所示.该模型分为三个部分:风力机发电模型、光伏发电模型和DC/DC电路变换.
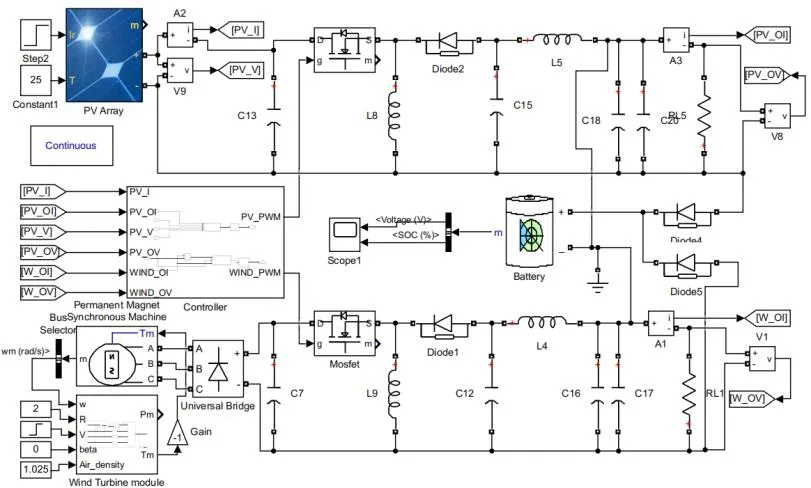
图3 系统电路拓扑建模Fig.3 System circuit topology modeling
风力发电控制电路建模分为三个部分:风力机发电部分、Buck-Boost变换电路和MPPT控制模块.风力机发电部分由风力机模型和发电机模型构成,风力机模型根据经典的风力机参数模型得到,发电机采用Simulink自带的PMSM电机模型,风力机叶轮半径0.5 m,桨距角为0°.MPPT模块的输入参数为系统的输出功率,输出参数控制DC PWM模块产生PWM信号,驱动MOS开关管.
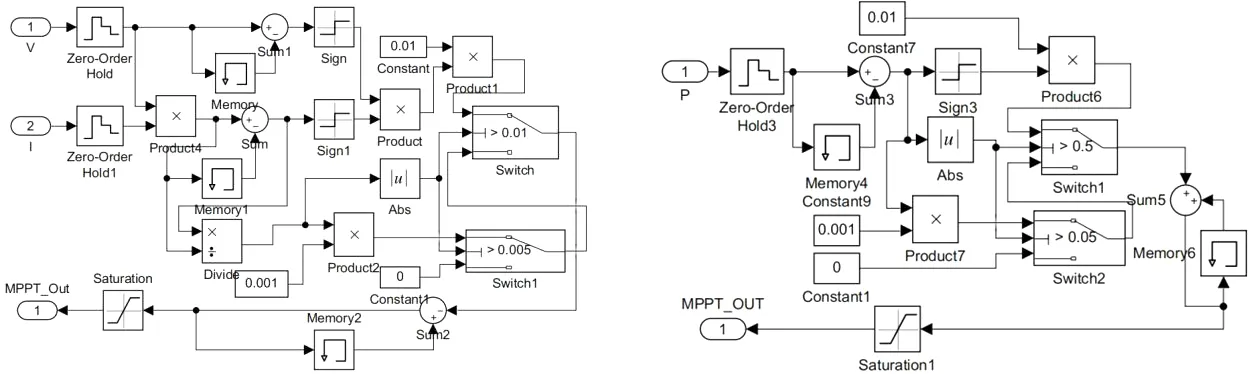
(a)光伏MPPT建模 (b)风力发电MPPT建模图4 MPPT算法建模Fig.4 MPPT algorithm modeling
光伏发电控制电路仿真模型包含三个主要部分:光伏板建模、Buck-Boost变换电路和MPPT建模.光伏板建模采用Simulink内建的PV Array模块,模块参数配置为:最大输出功率213.15 W;开路输出电压36.3 V;短路电流Isc为7.84 A;最大功率输出时的电压为29 V,电流7.35 A.
为了方便系统的扩容和升级,本系统的DC/DC变换电路部分统一采用Buck-Boost电路,该电路结构既可以实现升压,也可以实现降压,可以实现将不同电压等级的光伏板或者风力机接入到控制器中,极大增加系统的灵活性.由于Buck-Boost电路的输出纹波较大,因此输出滤波电路[13]采用LC构成的п型滤波结构.
2.2 MPPT算法建模
MPPT算法建模如图4所示,该模块在系统中的位置为图3中的Controller模块,分为光伏发电MPPT和风力机发电MPPT算法.综合考虑,本文选择改进的扰动观察法实现MPPT,并且以|dP/dV|作为步长变化控制量[14-15].算法流程和仿真实现图如图4(a)所示,首先采集光伏输出电压U与电流I,然后计算k时刻的功率P(k)和|dP/P|,根据|dP/P|的大小判断当前点与最大功率点的距离.如果距离大于δ1(本文设定值为0.02),则采用恒定步长为K1(本文设定值为0.01),步长的正负即当前是处于最大功率点的左侧还是右侧,由采样dU和dI的乘积来表示;如果小于δ1则进入自适应变步长控制.自适应变步长的步长计算为K2*(dP/P),K2设定值为0.001;当|dP/P|的值小于δ2(本文设定值为0.001)时,为了防止震荡,认为已经达到最大功率点.
为了实现最低成本,避免测量风机的转速和风速,本文选择改进的爬山搜索算法,和传统的扰动参数(通常为风力机励磁电流)不同,本文选择扰动参数为Buck-Boost变换电路的占空比.如图4(b)所示为风力发电MPPT算法的仿真结构图,该算法的思路和光伏MPPT类似.首先采集系统输出的电压和电流,计算输出功率P(k),然后计算ΔP(k),根据ΔP(k)的大小δ3(本文设定为0.5)来判断是采用定步长的K3(本文设定值为0.01)还是自适应步长;然后,自适应步长的参数K4设定为0.001;最后,当ΔP(k)小于δ4(本文设定为0.05)时,认为已经达到最大功率点.
3 结果分析
Buck-Boost电路结构的变换结果如图5所示.在如图5(a)为占空比突变时,电压存在突变,其中曲线①为普通电容滤波结果,曲线②为采用п型LC滤波后的结果,可以看到采用п型滤波后电路震荡减小,响应时间均在10 ms左右.如图5(b)所示为纹波电压图,曲线①为普通电容滤波结果,曲线②为采用п型LC滤波后的结果,从图中可以明显的看到采用п型LC滤波后纹波大幅减小,纹波系数经过计算后小于0.5%,而高频的毛刺噪声已经得到大幅度的消除.
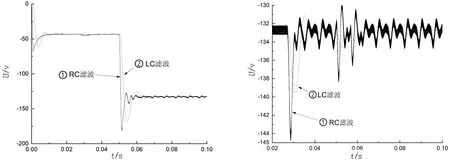
(a)电压突变图 (b)电压纹波图图5 Buck-Boost电压变换结果Fig.5 The voltage transformation result of Buck-Boost
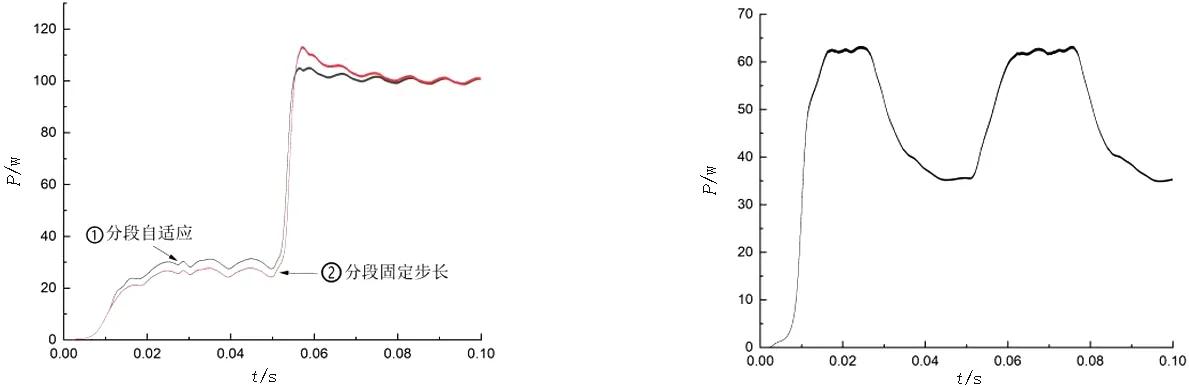
光伏发电MPPT仿真结果如图6所示.在图6(a)中,曲线①和曲线②的初始光照强度为500 W/m2、400 W/m2,在0.05 s时,光照强度突变为1 000 W/m2,曲线①为采用固定步长(以ΔP为输入参数)的MPPT算法结果图,曲线②为采用自适应步长(以ΔP为输入参数)的MPPT算法结果,两种以ΔP为输入参数的MPPT算法均能够实现最大功率跟踪,但是存在不同程度的震荡,快速响应能力在10 ms左右.在图6(b)中,曲线①和曲线②的初始光照强度均为500 W/m2,在0.05时,光照强度突变为800 W/m2,曲线①为固定步长(以|dP/P|为输入参数)的MPPT算法结果图,曲线②为分段自适应步长(以|dP/P|为输入参数)的MPPT算法结果图,两种以|dP/P|为输入参数的MPPT算法能够实现最大功率跟踪,但分段自适应步长的算法震荡最小,快速响应能力在5 ms左右.可以看到:基于|dP/P|为输入参数的分段自适应MPPT算法在响应时间和抗震荡性均是最优的.
(a)以ΔP为控制参数的MPPT (b)以|dP/P|为控制参数的MPPT图6光伏发电MPPT仿真结果Fig.6 The simulation results of photovoltaic power generation MPPT
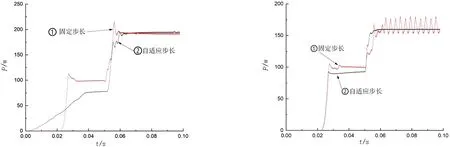
风力机发电MPPT算法的的结果如图7所示.图7(a)中,初始风速为3 m/s,在0.05 s时风速突变为6 m/s.曲线①为分段自适应的MPPT算法结果图,曲线②为分段固定步长的MPPT算法结果图.可以看到二则均存在轻微震荡,但都能实现最大功率跟踪.图7(b)为在周期性风速突变情况下的自适应MPPT算法仿真结果,可以看到采用基于系统输出功率的分段自适应MPPT算法可以快速的实现MPPT,满足小功率离网系统的需要.
(a)自适应与固定步长结果 (b)周期突变风速响应结果图7风力发电MPPT仿真结果Fig.7 The simulation results of wind power generation MPPT
4 结语
综合考虑光伏发电与风力机发电原理,将二者结合应用于诸如家用场景的小功率风光互补功率控制器,为了实现低成本和电路结构的统一性和扩展性,运用Buck-Boost的DC/DC电路拓扑结构是可行的.而且,在算法层面,尽可能的降低算法复杂度,采用基于|dP/P|的分段自适应光伏发电MPPT的算法在响应速度和稳定性方面均是最优的;采用基于ΔP(P为系统输出总功率)的分段自适应的风力机MPPT算法,不仅省略了风速测量、风机转速测量和大量风能数据记录,而且算法实现结果也满足小功率场景,极大降低成本.
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
农业工程学报(2022年7期)2022-07-09
太阳能(2022年2期)2022-03-07
成都信息工程大学学报(2021年5期)2021-12-30
中国惯性技术学报(2020年2期)2020-07-24
船舶与海洋工程(2019年6期)2019-12-25
中南大学学报(自然科学版)(2019年5期)2019-06-13
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2016年12期)2016-02-27
军民两用技术与产品(2016年3期)2016-01-05