
动力定位穿梭油轮外输时域运动响应分析
2020-09-17 00:50吴承恩张恩勇董德龙
海洋工程装备与技术 2020年3期
杨 旭, 吴承恩, 张恩勇, 董德龙
(1. 中海油研究总院有限责任公司,北京 100029;2. 南通中远船务工程有限公司,南通 226000)
0 引 言
近年来,我国海洋石油开发正逐步走向海外。中石油、中海油等企业在巴西海域已拥有自己的油田权益。掌握巴西海域相关油田开发技术十分重要。在巴西海域,多点系泊FPSO与动力定位穿梭油轮外输的模式被广泛应用,但在我国,动力定位穿梭油轮外输还未有应用。动力定位系统的核心模块在工程上也一直未实现国产化。对于动力定位海洋工程平台,我国已成功制造了981等动力定位半潜平台,对其研究也较为深入[1-4]。但对于动力定位穿梭油轮的相关研究较少[5],国内没有对其进行时域模拟分析的相关研究,其推进器布置形式以及作业环境工况要求等与海洋平台也较为不同。
本文正是基于以上背景,以巴西海域某油田为目标油田,对一艘苏伊士型动力定位穿梭油轮进行分析。采用PID控制算法及KALMAN滤波对动力定位系统进行时域控制,采用最优化理论对推进器进行推力分配。对外输作业完整工况、推进器破损工况以及百年一遇环境工况进行时域运动响应分析与推进器功率分析。结果可为穿梭油轮推进器功率选型以及海上油田开发外输模式选型提供必要的参考。
1 目标船舶
本文以苏伊士型动力定位穿梭油轮为目标船舶,俯视图与侧视图如图1所示,其主要信息如下:
(1) 全球无限航区、低速柴油机驱动、深井泵型穿梭油轮。
(2) 具备DP2级动力定位能力,船首配有2套管隧式侧推器和1套伸缩式全回转方位推进器,船尾配套1套管隧式侧推器和1套伸缩式全回转方位推进器。
(3) 主机: MAN6S70ME-C6 Tire II×1台;SMCR: 15 400 kW×86 r/min。
(4) 主发电机: 3 380 kW×2; 4 345 kW×2。应急发电机: 700 kW×1。
(5) 管隧式推进器: 2 200 kW×3;伸缩式全回转推进器: 2 500 kW×2。
(6) 主尺度: 全长LOA=276.30 m;水线面长LBP=262.00 m;型宽B=46.00 m;型深D=24.30 m;设计吃水d=17.55 m;最大载重量为152 000 t。
(7) 主推进器为1号推进器,船首管隧式推进器为2号、3号推进器,船尾管隧式推进器为4号推进器,船首全回转推进器为5号推进器,船尾全回转推进器为6号推进器。

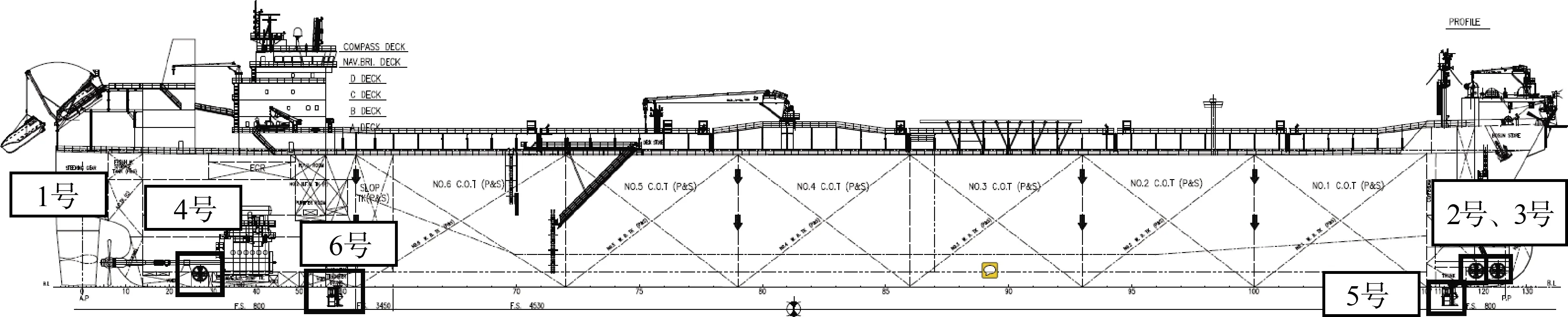
图1 苏伊士型动力定位穿梭油轮俯视图与侧视图
2 环境条件
本文以巴西海域某油田为目标油田,作业水深约为800 m。巴西海域海况相对温和。通常以8 m/s的偏北风或东北风为主。鉴于强风并不大,因此其有效波高约为2 m。巴西海域极端的风、浪主要由强热带风暴造成。从海洋南边来的涌浪数量较多,尤其是在3—10月期间。最近有证据表明,附近海区还有飓风生成,但数量相当稀少,大概一百年内有一到两个。本文的环境条件主要包括作业环境条件和百年一遇环境条件。
解脱作业工况选择Hs=4.5 m的JONSWAP谱进行分析,这个波高大于常年有效波高2 m,更为保守,根据相关水文统计,该波高累积概率可达99%。叠加的流载荷、风载荷与浪向相同,叠加一年一遇的风流载荷。常规作业条件(Hs=2.5 m/s)由于小于解脱作业工况,因此不再进行额外分析。
百年一遇环境条件选择百年一遇浪、十年一遇风及十年一遇流的组合进行分析,方向按风浪流同向考虑。具体如表1所示。

表1 巴西作业海域环境条件
3 分析方法
3.1 分析流程
本文针对一艘苏伊士型动力定位穿梭油轮进行时域模拟分析。首先,需对其进行水动力分析。水动力分析采用三维势流理论,利用SESAM/GENIE模块建立水动力网格模型,利用SESAM/HYDROD模块对穿梭油轮进行分析,确定其幅频响应算子(response amplitude operator, RAO)、附加质量、阻尼矩阵和二阶QTF,其水动力网格模型如图2所示。网格数共计3 303个,网格密度为2 m。
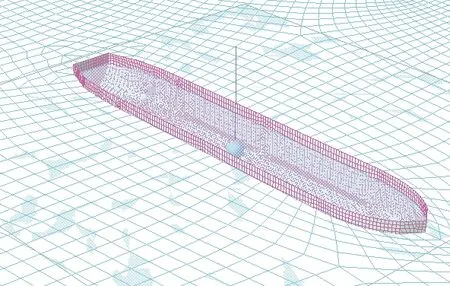
图2 动力定位穿梭油轮水动力网格模型
之后,在时域分析软件SIMO中求解时域运动方程,并考虑实时推力控制与推力分配,得到时域响应计算结果。
3.2 控制理论
本文采用PID(proportional, integral, derivative)控制理论对动力定位系统进行时域控制模拟。PID控制理论是控制领域的经典理论,自20世纪60年代第一次应用于动力定位系统以来不断发展,并被广泛应用于船舶与海洋平台的定位控制。PID理论的主要控制方程如式(1)~式(3)[6]:
(1)
ε(t)=x0-x(t)
(2)
(3)
式中:x(t)为滤波位置;x0(t)为目标位置;ε(t)为位置误差;FT0为推进器作用力;KD为微分增益系数;KP为比例增益系数;Kl为积分增益系数。
3.3 KALMAN滤波
时域波浪可分为波频部分与低频部分,波频部分无法对其进行控制,其信号对于推力分配没有意义,因此需要进行滤波,本文选择较为成熟的KALMAN滤波[7]。首先对平台进行状态预测,然后得到预测误差,再将测得的平台状态信息进行滤波,最后得到一个平台状态的最佳估计值,同时给出滤波误差。
3.4 推力分配方法
本文将推力分配视为最优化问题,每个推进器需要求解如下参数:x、y为推进器坐标;Wi为推力分配系数;Fmax为最大推力;Fx、Fy为x、y方向最大需求推力;M为需求力矩;θi、θj为推进器与x、y方向夹角。目标函数为[8]

(4)
其中,
α=arctanFx/Fy
(5)
(6)
(7)
(8)
(9)
式中: 0.1是为保证数值计算稳定所选系数。其限制条件: 最大推力;推进器方向改变角速度;推力角度限制。对于最优化问题,有多种方法可解,本文选用常见的拉格朗日乘数法。
3.5 运动方程
运动方程求解采用MARINTEK公司开发的SIMO模块进行求解,其好处是可与多种水动力模块以及RIFLEX等有限元模块建立接口,便于今后在考虑动力定位情况下进行立管-平台耦合分析与海上吊装、作业分析。时域状态下的运动方程如下[9]:

(10)
M=m+A(ω)
(11)

(12)
方程右边依次为风拖曳力、一阶波浪力、二阶波浪力、流载荷、动力定位推动力。动力定位推动力根据参考位置与现位置经PID算法得出,并输出给推力分配方法,得到各推进器分配力。
3.6 环境载荷模拟
本文在计算中考虑了风浪流载荷的影响。对于风载荷,本文选择API规范[10],对船舶受风面积、形状系数和高度系数进行分析,确认了0、 45°、 90°三个方向的定常风载荷,对其他风向进行加权和对称变化。
对于流力,同样以定常力进行分析,由于不存在锚链和立管系统,仅考虑表面流对船体的作用即可。同样,采用API规范进行估算。
对于波浪力,给予随机种子,根据波浪谱得到随机波浪时历曲线。船舶运用三维势流理论,利用面元网格模型求解得到船舶幅频响应算子(RAO)、附加质量、阻尼、慢漂力、二阶差频力,得到结果输出至时域运动方程求解软件中,并根据波浪时历曲线进行波浪力的时域计算。再按3.5节所述进行运动方程求解。
3.7 推进器推力
推进器推力与推进器功率的关系根据API RP 2SK规范相关的经验表格以及推进器的类型进行分析。
4 结果
4.1 静力分析
首先,利用SIMA软件求解无波浪载荷下的穿梭油轮平衡位置,本文根据巴西海域主流风浪流条件确定初始定位位置为(0, 0, 0),艏向角度为45°。得到平衡位置与期望值完全相同,推进器推力如表2所示。
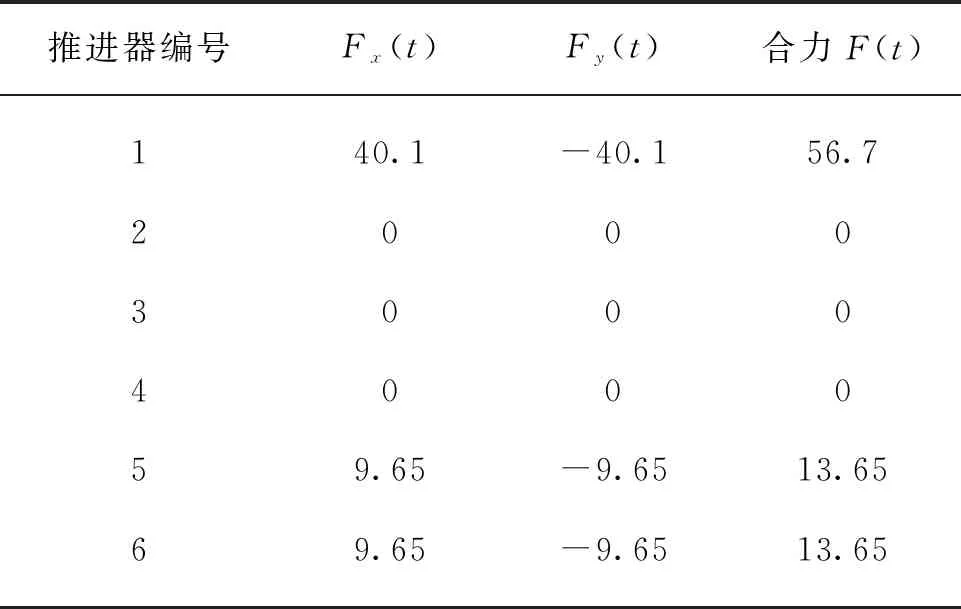
表2 静力分析推进器受力 (单位: kN)
从表中可以看出,此时贡献推力的主要为推进器1号,主要用于抵抗定常环境力(风力+流力)。推力负载约为20%。
4.2 完整外输工况
对于风浪流同向的完整外输工况,所得重心处运动响应统计值如表3所示。

表3 完整外输工况运动响应统计值
船体重心轨迹如图3所示,位移最大值为4.3 m,小于水深的3%(45 m),且艏向角基本维持在45°方向上,工况3满足规范要求。船舶重心轨迹一直在东北向,偏移至(1.1, 1.8)后逐渐向原点靠拢,基本稳定在(1.1, 0)附近的位置。
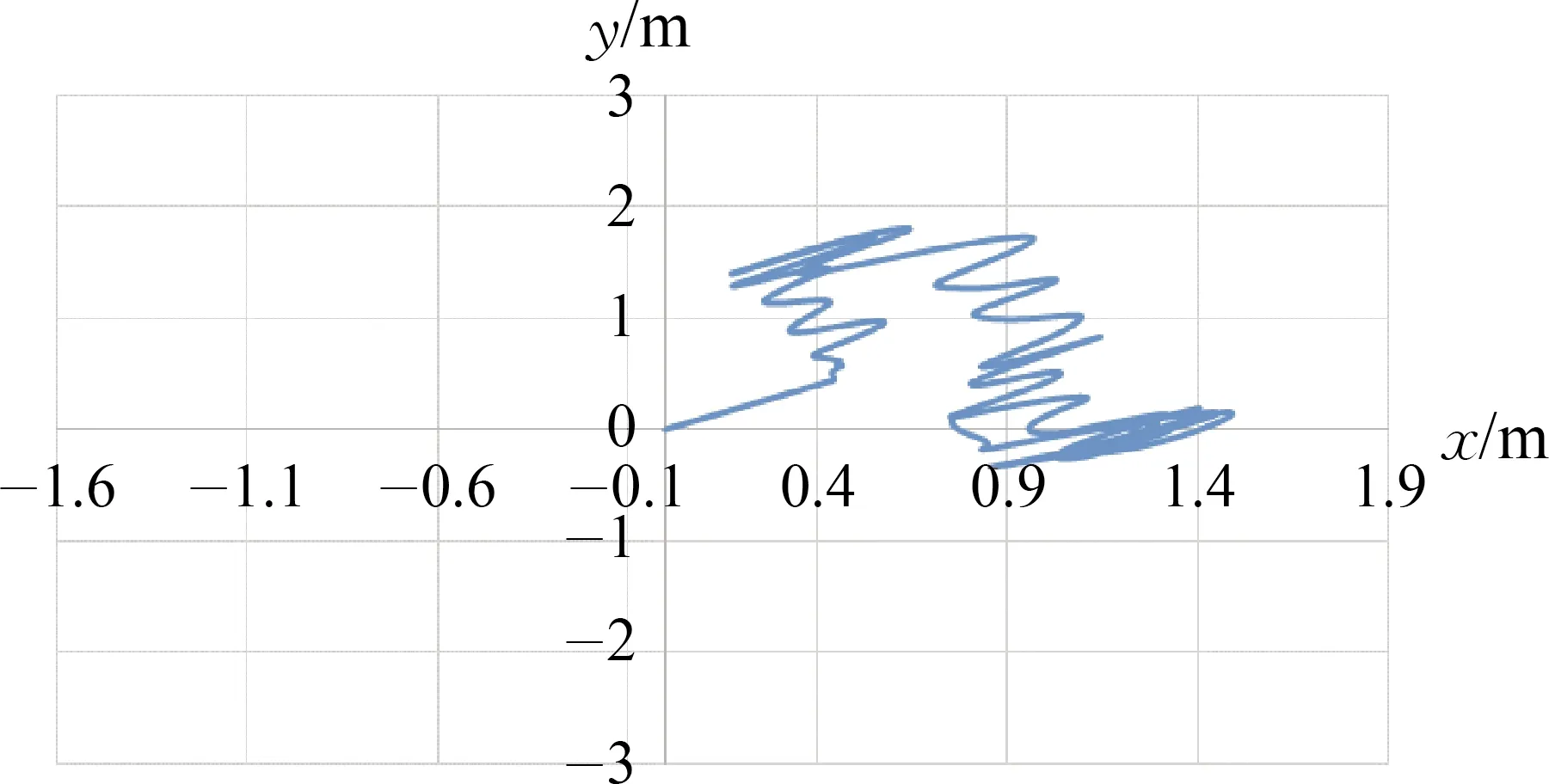
图3 完整外输工况穿梭油轮重心轨迹曲线
推进器推力如表4所示。

表4 完整外输工况推进器推力统计值
主推进器最大值为35.8%,但其平均值仅为1.2%,说明在主推进器将船体推进到理想位置后,主推进器便不再需要较大推力。2~4号推进器中,2号推进器发挥主要作用,平均推力为28.8%,最大推力为83.9%。可以看出在3个管隧式推进器中,主要是2号推进器发挥的作用,3号、4号基本处于待机状态,适时介入。5号、6号全回转推进器平均负荷为29.7%、 14.6%,最大负荷为82.1%、 39.7%。这两个全回转推进器主要用于船舶转向,功率不高,推力负荷较大。在实际海况中,可根据控制方式和紧急程度决定推力的负载情况,降低推力负载,延长转向时间。这样可保证安全性,同时降低能耗。
4.3 破损工况
对于风浪流同向单推进器破损情况,本文考虑了所有推进器单个失效的情况。限于篇幅,本文主要给出1号推进器(主推进器)在1 000 s失效的结果。图4为各推进器的时间历程曲线,限于篇幅取5 000 s,其中1号推进器在1 000 s失效。之后可看出,其他几个推进器升高代替了主推进器作用。从推力百分比可以看出,自1号推进器破坏后,5号、6号两个全回转推进器发挥了更大的作用,部分时间达到了全负荷运转。
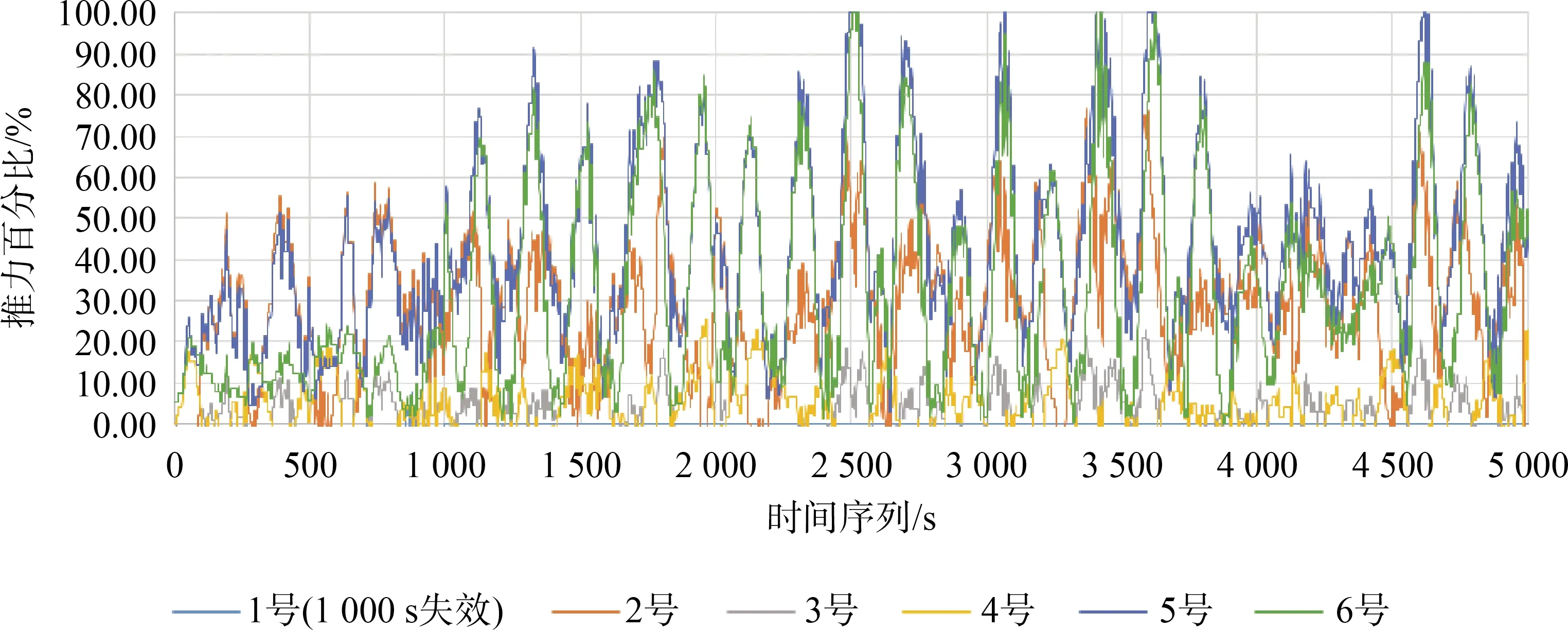
图4 破损工况推进器推力百分比
表5为该工况下穿梭油轮位移情况,从表中可以看出,1号推进器破损对整个船舶的定位能力影响不大,船舶依然可以完成定位,符合规范要求。
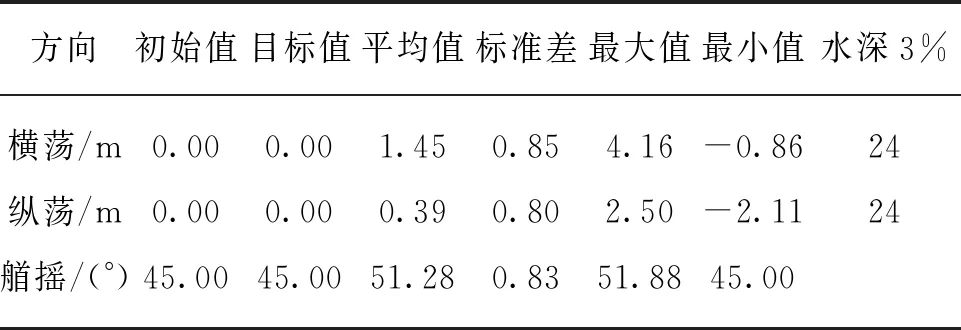
表5 破损工况运动响应统计值
4.4 百年一遇环境工况
本节分析了巴西海域风浪流同向时百年一遇环境条件下穿梭油轮定位能力,如表6所示。结果表明百年一遇海况条件下,本文目标船舶偏移最大值已超过水深的12%,艏向角偏移也达到了53°。因此,该船舶并不具备百年一遇环境条件下的定位能力,考虑到这一因素。在外输过程中,若遇到极端恶劣环境和台风预报,应提前暂停外输工作,进行避台。

表6 百年一遇环境条件运动响应统计值
5 结 语
本文采用PID算法、KALMAN滤波与最优化理论进行动力定位控制系统时域模拟,对一艘苏伊士型动力定位穿梭油轮在巴西海域外输过程中的完整工况、破损工况、解脱工况以及百年一遇环境条件进行了时域运动响应分析与推进器推力分析,根据API规范进行了校核。所得结论如下:
(1) 该船舶在Hs≤4.5 m时,位移最大值小于水深3%,动力定位能力可满足相应外输工作。
(2) 在单一推进器破损情况下(包括主推进器),该船舶可继续完成外输作业和定位,直至安全解脱。在此种工况下,部分推进器功率达到上限。
(3) 在解脱工况下,该船舶可安全进行外输解脱,满足相应定位要求。
(4) 在百年一遇环境条件下,该船舶无法进行相应定位,因此应根据天气预报,合理避台,避免在极端环境条件下进行外输。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
水上消防(2021年5期)2022-01-18
天津科技(2021年5期)2021-06-04
舰船科学技术(2021年12期)2021-03-29
锦绣·中旬刊(2020年11期)2020-12-28
科学导报·学术(2020年19期)2020-07-09
当代陕西(2018年12期)2018-08-04
风流一代·经典文摘(2017年8期)2018-01-15
中国舰船研究(2014年6期)2014-05-14
中国船检(2013年10期)2013-08-15
