
福州市区汽车行驶工况构建的研究
2020-09-14 06:02唐哲常振虎林伟成曹文胜
五邑大学学报(自然科学版) 2020年3期
唐哲,常振虎,林伟成,曹文胜
(五邑大学 数学与计算科学学院,广东 江门 529020)
本世纪初,我国直接采用欧洲的NEDC 行驶工况对汽车产品的能耗/排放进行认证,有效促进了汽车节能减排以及相关技术的发展. 近年来,随着汽车保有量的快速增长,我国道路交通状况发生了很大变化,以NEDC 工况为基准所优化标定的汽车,实际油耗与法规认证结果的偏差越来越大,影响了政府的公信力. 另外,欧洲在多年的实践中也发现了NEDC 工况的诸多不足,转而采用世界轻型车测试循环(WLTC),但该标准最主要的两个特征工况怠速时间比和平均速度与我国实际汽车行驶工况的差异更大. 因此,制定反映我国实际道路行驶状况的测试工况,显得越来越重要. 另一方面,我国地域辽阔,各个城市发展程度、气候条件及交通状况不同,使得各个城市汽车行驶工况特征存在明显的不同. 因此,基于城市自身汽车行驶数据进行城市汽车行驶工况的构建也越来越迫切. 我们希望所构建的汽车行驶工况与该市汽车的行驶情况尽量吻合,理想情况下能完全代表该市汽车的行驶情况. 本文根据福州市区的实际道路特点,利用GPS 设备对汽车的行驶工况数据进行采集,将采集后的数据进行分析处理,再使用BP 神经网络反复训练、验证并测试数据,从而构建出福州市的汽车行驶工况曲线.
1 车辆行驶数据的采集与预处理
1.1 数据采集
本文运用中国汽车技术中心专门定制的数据采集车载终端进行汽车行驶数据采集. 将车载终端与实验车辆的OBD 接口相连接,以1 Hz 频率进行实车数据采集. 采集的数据可分为汽车行驶状态数据和汽车所处环境状态两个部分. 汽车行驶状态数据包括:车速、发动机转速、扭矩百分比、档位、瞬时油耗、进气歧管温度、空燃比、发动机负荷、进气歧管压力. 汽车环境状态数据包括:经度、纬度、环境温度.
1.2 数据预处理
由于以下原因,有些采集数据会出现异常:
1)GPS 需要同时接收到4 颗以上的卫星信号才能定位成功,因此采集设备的GPS 信号在某些环境下会受到干扰,如汽车在驶过信号较差的偏远地区或两栋很高的建筑物之间、进入隧道等,GPS 信号有可能被干扰或直接被屏蔽,这样可能造成汽车虽在运动,但GPS 速度为零、经纬度不变等情况.
2)速度数据存在噪声. 即使GPS 能成功记录下速度数据,但是GPS 采集设备有时会产生零点漂移,进而导致数据有误差.
3)在长期塞车或者发动机故障时,汽车的怠速时间过长,会影响行驶片段的数据收集.数据预处理的步骤如图1 所示.

图1 数据预处理
预处理好的数据文件导入MATLAB,采用采用文献[1]方法从预处理数据提取如图2 所示的运动学片段.
2 汽车行驶工况构建
车辆行驶的整个过程中,工况是非常复杂的,但从各种特征综合考虑,大致上可以分为匀速工况、加速工况、减速工况和怠速工况等4 种,区分4 种工况的标准如下[2]:
2)加速工况:车辆速度 v≠0 km/h,并且加速度a>0.1m/s2;
3)减速工况:车辆速度 v≠0 km/h,并且加速度a<-0.1m/s2;

图2 运动学片段
采集的实验数据由一定数量的运动学片段组成,而代表性行驶工况是从大量的运动学片段中选择合适的片段组合而成的. 因此,我们需要选择特征参数来评价这些运动学片段. 为保证片段描述的全面性,我们定义了 如表1 所示 的12 个特征参数来描述运动学片段. 我们把所有运动学片段计算的特征参数值组合在一起,就可以得到一个样本数量×特征参数的矩阵,该矩阵可以用于行驶工况解析流程中.

表1 乘用车道路行驶工况特征值
在12 个运动学片段特征参数中,有很多参数不可以直接测得,但可通过相关参数计算得到. 各个速度工况对应的加速度值利用相邻两个数据的GPS 速度来求取,其公式如下:

其中,n 为一个运动片段的数据个数;ai,i+1为第i 秒到第i+1 秒的瞬时加速度,我们规定 a0=0;iv 与vi+1分别为第i 秒和第i+ 1秒的速度; ti与ti+1分别为第i 秒和第i+ 1秒的时刻. 将采集后的多组数据进行预处理,通过编程将数据分成2 409 个运动学片段,再分别求出总体试验数据和各个运动学片段的特征参数,得到一个代表性的运动学片段是样本数量×特征参数的矩阵. 各个运动学片段的部分特征参数值如表2 所示.

表2 各个运动学片段特征参数
在这些运动学片段中,以速度快慢为依据,可把它们细分为Low,Mid,High 三类.利用BP 神经网络对这三类数据反复训练、验证和测试,以此构建汽车行驶工况及汽车运动特征评估体系[3-7]. 具体步骤如图 3所示.
以Low 类为例,用BP 神经网络对Low类数据进行处理,这些数据的零点误差集中分布在-0.053 聚类点的附近,说明本文模型对数据的预测误差较小,符合要求. 运行结果如图4 所示.
图5 中的4 个图分别是训练、验证、测试和综合的回归系数图,如图中显示,4个R 值均很接近 1. 直线 Y=T 与直线 Fit很逼近,这说明本文模型的预测效果不错.
根据预处理后的数据,使用BP 神经网络等方法,构建出如图6 所示的Low 类的行驶工况图曲线(400 ~450 s).
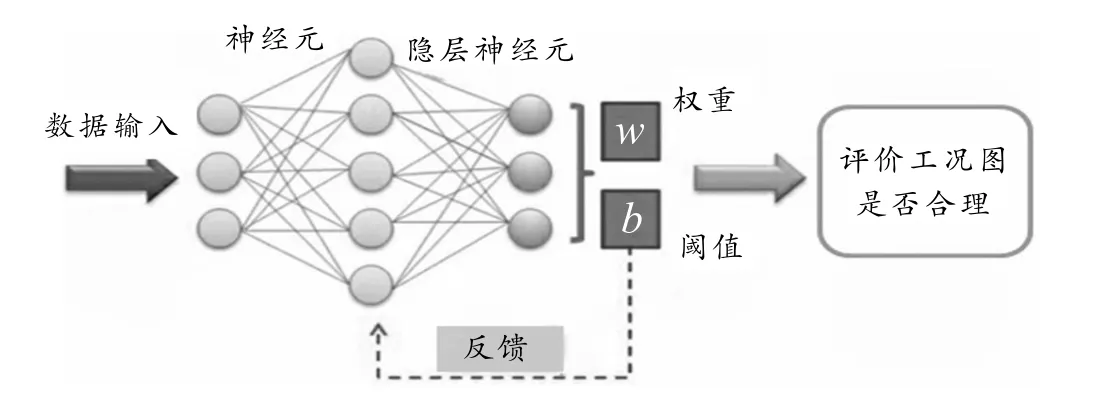
图3 BP 神经网络评价工况流程图

图4 Low 类的均方误差分布直方图

图5 Low 类的回归系数
同理可得Mid 类和High 类的汽车行驶工况图曲线. 最后我们把三类汽车行驶工况曲线合并成如图7 所示的一个完整的行驶工况曲线.由于Low 类、Mid 类、High 类都是经过BP 神经网络反复训练得出的最优汽车行驶工况图曲线,故构建的总汽车行驶图曲线也是最优的.

图6 Low 类的行驶工况曲线
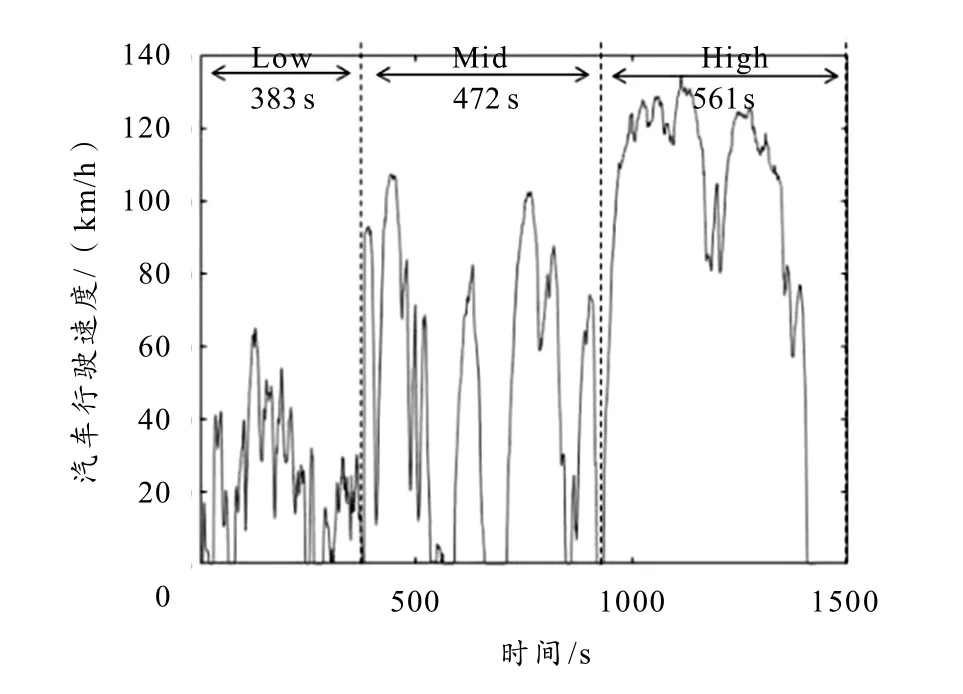
图7 构建的总汽车行驶图曲线
3 结论
本文根据道路汽车试验和数据分析,将运动学片段法和BP 神经网络相结合,应用在福州市区汽车行驶工况构建过程中,全国其他城市汽车行驶工况构建也可以参考本文方法. 本文的不足之处:
1)在模型建立时,对扭矩百分比、进气歧管温度等因素考虑不足,与实际情况有偏差;
2)在模型建立时,由于算法自身局限性导致需要进行大量的数据运算,模型求解对计算机运算能力要求高.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
材料与冶金学报(2022年2期)2022-08-10
舰船科学技术(2022年10期)2022-06-17
温州大学学报(自然科学版)(2022年2期)2022-05-30
建材发展导向(2021年23期)2021-03-08
杭州电子科技大学学报(自然科学版)(2020年6期)2020-12-03
电子制作(2019年15期)2019-08-27
制导与引信(2017年3期)2017-11-02
电子技术与软件工程(2016年22期)2016-12-26
冰雪运动(2016年5期)2016-04-16
