
基于视觉识别的垃圾分类机器人系统的设计
2020-09-12 14:20覃南强梁先斌贾国库
企业科技与发展 2020年8期
关键词:工业机器人
覃南强 梁先斌 贾国库
【摘 要】为解决垃圾分类自动化的问题,文章设计一套基于视觉识别的智能分拣系统,介绍了系统的总体方案和控制方案,设计了传送带装置、视觉系统,通过视觉系统识别和工业机器人动态跟踪抓取实现了垃圾分拣功能。
【关键词】工业机器人;垃圾分拣;视觉识别;AGV小车
【中图分类号】TP242 【文献标识码】A 【文章编号】1674-0688(2020)08-0046-02
0 引言
人类活动产生越来越多的垃圾无法处理,然而垃圾是放错地方的资源,通过实施垃圾分类措施,可以变废为宝,既处理了无法安置的垃圾,又节省了生产原料。但因各种原因,例如人们的环保意识不强和垃圾种类繁多等,目前实际的情况是很多垃圾混合在一起,并没有真正做到垃圾分类。本文设计一套垃圾分类系统,实现垃圾分类的自动化,可用于教学和演示,也可以作为实际垃圾分类工程应用的雏形。
1 系统总体设计
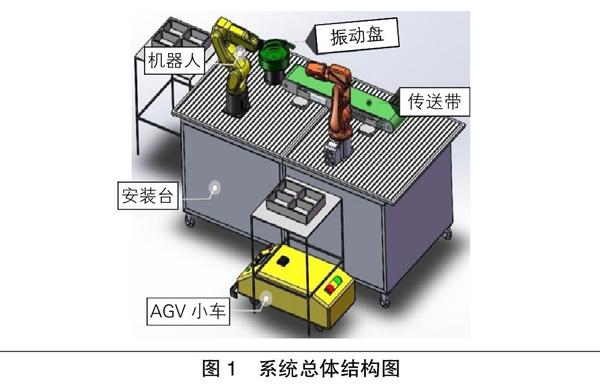
系统采用两台小型工业机器人、工业视觉识别系统、小型传送带、AGV小车、通用台架等设备,自动完成对分拣对象的传送、识别、抓取、分拣和装载等一系列任务,形成一条小型循环演示生产线。整个系统采用模块化设计,可单独分为机器人识别分拣系统和机器人上下料系统,每个分系统也可单独进行操作演示(如图1所示)。
整个过程有如下几步。第一步:传送带上传送着各类物品,分拣机器人通过视觉控制系统识别分拣对象,将从传送带上抓取的物品放入相应的垃圾盒内。第二步:AGV小车载着垃圾桶沿着指定路线开向下一个站点。第三步:AGV小车到位后,负责装载的机器人抓取垃圾盒,将垃圾全部倒在振动盘上,与此同时,AGV小车开始将备用垃圾盒运回初始位置。第四步:振动盘将垃圾逐个振出到传送带上,此时小车已回到原点,实现循环演示。
2 系统控制方案
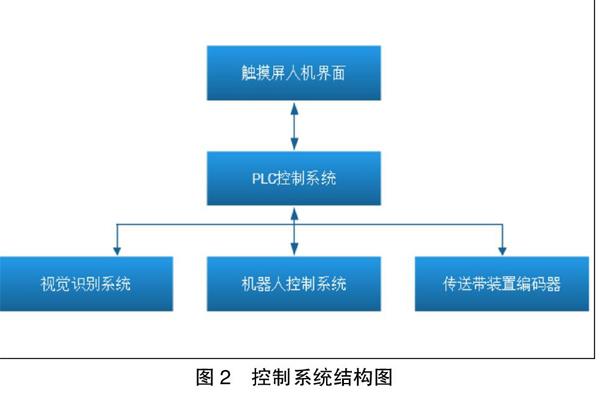
在智能分拣中,控制系统是核心部分,保证智能分拣各个组成部分的协调工作。控制系统结构如图2所示。
控制系统中,PLC作为中央控制系统,接收并处理视觉检测识别系统、工业机器人和传送带编码器发送过来的信号,控制系统的启停和告知机器人执行相应的程序,控制整个系统的工作和循环。PLC接有人机交互的触摸屏,触摸屏主要负责系统各部分的参数设置、状态显示等。
3 智能分拣系统的实现
3.1 工业机器人选择
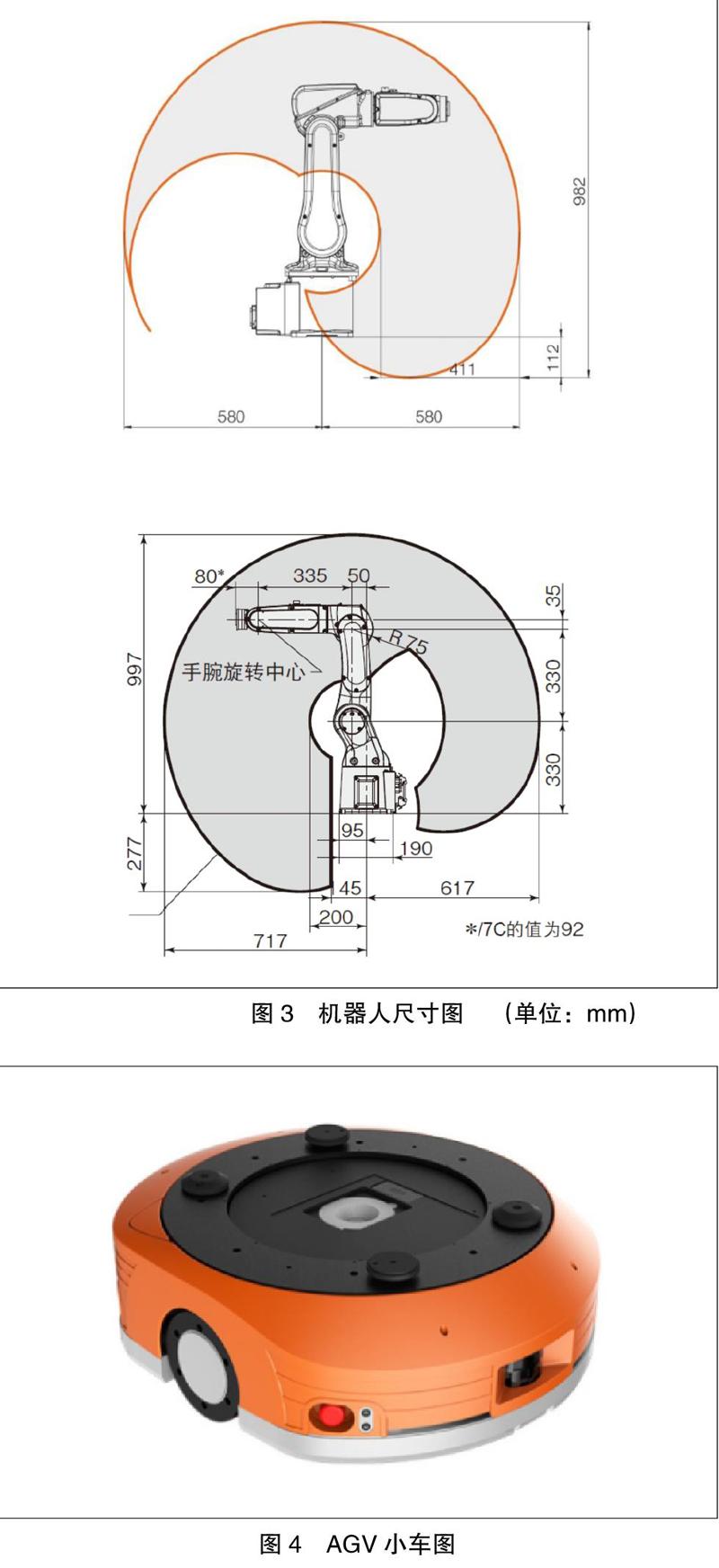
需要一台品牌为“ABB”、型号为IRB120-3/0.6的小型工业机器人作为分拣执行单元,负责将传送带上的物品依次捡取并分类放入垃圾盒内。控制轴数为6轴;工作范围为580 mm;机器人重量为25 kg;载重为3 kg;重复定位精度为±0.01 mm。
另需一台品牌为“FANUC”,型号为LR Mate 200 iD的小型工业机器人作为装载单元,负责将垃圾盒里的垃圾一次性全部倒在振动盘上。控制轴数为6轴;工作范围为717 mm;机器人重量为25 kg;载重为7 kg;重复定位精度为±0.02 mm。机器人尺寸图如图3所示。
3.2 视觉系统设计
视觉检测识别系统主要包括支架、智能相机、镜头、光源和IO通信模块,其中智能相机、镜头和光源安装在工业机器人手腕端,IO通信模块通过线缆与智能相机连接。
3.3 传送带设计
传送带的作用为接收振动盘上掉落的垃圾,以可调的速度,将垃圾从FANUC机器人端运到ABB机器人端。根据机器人分拣操作速度、AGV小车循环一周时间及安装台尺寸,确定传送带相关参数如下:长1 000 mm、宽175 mm,框架铝板,皮带1 mm,绿色,承重20 kg,速度为0~10 m/min,預留接口与机器人和控制系统通信。
3.4 AGV小车
当垃圾盒装满垃圾后,AGV小车将垃圾盒连同架子顶起,接着运输到垃圾中转站。为了实现演示循环,本文设计了两套垃圾盒及货架。AGV小车将垃圾放下后,继续移动向前,将另一空垃圾盒及架子顶起,然后运输到循环起点处。考虑到场地何负载问题,最终选择快仓公司的朱雀M15A小车,尺寸大小为620 mm×538 mm×221 mm,自重为78 kg,负载为150 kg,导航方式为激光导航,含顶升机构(如图4所示)。
3.5 振动盘
垃圾盒内的垃圾在传输的过程中混为一体,甚至叠加在一起,不利于摄像头识别及机器手的抓取作业。因此,可以利用震动盘将垃圾分散,依次振动出去,有序传输到传送带上。振动盘结构简单,只有一圈,将首个垃圾振动出去的时间小于等于AGV小车从中转站到循环起点的时间。振动盘出口向下倾斜,直接搭到传送带上方,防止垃圾掉落在传送带外面。
3.6 安装台
安装台面应有槽口,用于固定各设备,且方便调整设备在台面上的位置。安装台应为两个台拼接而成,方便分离,实现每个工业机器人可单独演示的功能。安装台内应有空间放置工业机器人的电控箱。安装台有滑轮,方便移动。
4 结语
本智能分拣系统已在实验室安装完成,用于演示与学习。
参 考 文 献
[1]许丽川,刘佳峰.物料分拣虚拟仿真实验系统设计[J].实验技术与管理,2017(2).
[2]蒙启泳,全友钦,吴奈霖,等.基于机械手的物料分选装置设计[J].电子制作,2014(1).
[3]庄琼云.基于OpenMV的智能寻迹小车设计与实现[J].黎明职业大学学报,2018(4).
[4]牛秀明.机器人:引领物料处理新方式[J].物流技术(装备版),2012(16).
猜你喜欢
中国科技纵横(2016年20期)2016-12-28
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年22期)2016-12-23
汽车科技(2016年6期)2016-12-19
科技创新导报(2016年21期)2016-12-17
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技视界(2016年18期)2016-11-03
企业导报(2016年13期)2016-07-19
科技视界(2016年15期)2016-06-30
成才之路(2016年4期)2016-03-23
