一种面向农业无人机影像分割的尺度参数自动确定方法
2020-09-12 10:11石雅娇陈鹏飞
中国农业科学 2020年17期
石雅娇,陈鹏飞
一种面向农业无人机影像分割的尺度参数自动确定方法
石雅娇1,2,陈鹏飞1,3
(1中国科学院地理科学与资源研究所/资源与环境信息系统国家重点实验室,北京 100101;2中国科学院大学,北京 100049;3江苏省地理信息资源开发与利用协同创新中心,南京 210023)
【】自动提取影像中作物种植区域信息,对于推动无人机高分辨率影像在精准农业中的应用具有重要意义。本研究针对分割评价函数中加权局部方差法(weighted local variance,WLV)的缺陷,面向农业无人机影像高精度自动分割的需求,提出改进方法并基于不同作物田间试验数据进行对比验证。针对没有充分考虑分割对象内部同质性的问题,本研究在的基础上增加对象间同质性的计算,提出了改进加权局部方差法(improved weighted local variance,IWLV)。设计玉米氮肥试验和小麦水肥试验,获取不同作物不同时期及长势下的无人机影像。基于获取的无人机影像,设置不同情景,分别耦合主流分割算法与、法开展影像分割,将它们的分割结果与人机交互分割结果进行对比,并基于单尺度对象精度(single-scale object accuracy,SOA)法进行评价。基于法选择的最优分割尺度往往偏大,分割影像时会存在欠分割现象,而基于法选择的分割尺度进行分割的结果与人机交互分割结果更为接近。对于所有设定的分割情景,法获得了更高的值。与法相比,本研究提出的法可以更准确实现无人机影像分割中尺度参数的自动确定。
尺度参数;图像分割;无人机影像;改进加权局部方差法
0 引言
【研究意义】相对于其他遥感平台,无人机遥感具有机动灵活的特点,容易获取高时间、空间分辨率影像,对于精准农业管理具有重要意义[1]。高空间分辨率的影像为准确区分作物植株与土壤等背景提供了数据支撑。长期以来,学者们一直在设计各种光谱指数来去除土壤等背景的干扰[2-4]。如果基于高空间分辨率的无人机影像直接把土壤等背景去除掉,那对于提高作物生理生化参数反演精度具有重要意义。已有学者的研究表明,基于高分辨率无人机影像剔除土壤背景可提高作物水分、植株氮浓度等参数的反演精度[5-6]。另外,准确提取田间作物,对于识别杂草、监测苗情等都非常重要。基于遥感影像区分作物与土壤背景,实际是对影像进行分类。对影像进行分类的方法包括人工目视解译法、基于像元的自动分类法和基于对象的自动分类。目前,已有研究在提取田间作物时,多采用目视解译法或基于像元分类法[6-7]。目视解译法工作量大,而像元法往往“椒盐现象”严重[8-9]。对于无人机超高空间分辨率影像来说,面向对象的分类方法往往能取得较好的结果[10-11]。面向对象分类法的基本流程是通过图像分割获得对象,然后对分割对象进行分类以达到识别目标地物的目的。因此,图像分割是面向对象遥感影像处理中的重要环节[12-13]。在分割对象时,需要设定尺度参数,它与对象大小密切相关。目前,研究人员多基于经验多次人工尝试获得,大大限制了其推广应用[14]。因此,针对无人机影像高精度自动分割需求,开展尺度参数自动确定方法研究,对精准农业管理具有重要意义。【前人研究进展】对于影像的自动分割,目前基于无人机影像的研究还较少,已有研究多基于高分辨率卫星影像数据开展[15-18]。但这些研究工作为开展无人机影像方面的相关应用提供了参考。根据“对象内部有较好的同质性,对象间有较好的异质性”的原则来构建评价函数,根据评价函数值变化的趋势,选择“变化速率最大”或“拐点”位置处的尺度参数值作为最优值,是已有尺度参数自动确定方法的核心思想[19-22]。构建对象内平均光谱角作为评价函数,Yang等[23]认为平均光谱角变化速率最快时所对应的尺度参数值为最优值。随后,针对平均光谱角只考虑对象内同质性的问题,Yang等[24]引入对象间光谱角作为对象间异质性来对前期研究进行改进。张俊等[25]在分割影像时,采用了与邻域绝对均值差分方差比作为评价分割尺度的指标,认为其局部峰值所对应的尺度为某一地物的最佳分割尺度,来实现尺度参数的自动确定;以局部方差(Local Variance,LV)[26]为切入点,王志华等[27]提出加权局部方差(weighted local variance,WLV)作为评价函数,根据评价函数“拐点”来自动确定分割尺度参数的方法。【本研究切入点】法计算简单,较易实现,但其在分割时只考虑了对象间异质性,缺乏对同质性的考虑,可能会导致分割结果欠准确。【拟解决的关键问题】本研究提出了一种改进的分割尺度参数自动确定方法,并依托不同水、肥条件下获取的玉米、小麦多生育期、不同长势下无人机影像对改进前后的方法进行对比分析,为农业无人机影像自动分割提供新的技术支撑。
1 材料与方法
1.1 田间试验
为满足实际应用需求,本研究构建了不同作物的田间试验,以丰富试验场景。
1.1.1 玉米氮肥梯度试验 于2018年5月—10月在吉林省蔡家镇(124°40′25″E,43°24′00″N)开展试验。品种为“吉单558”。试验设5个处理,3个重复,共15个小区,各小区面积为7.8 m×13 m。其中,5个氮肥处理分别为0、70、140、210、280 kg·hm-2。除氮肥外,各小区其他管理措施相同,试验示意如图1所示。
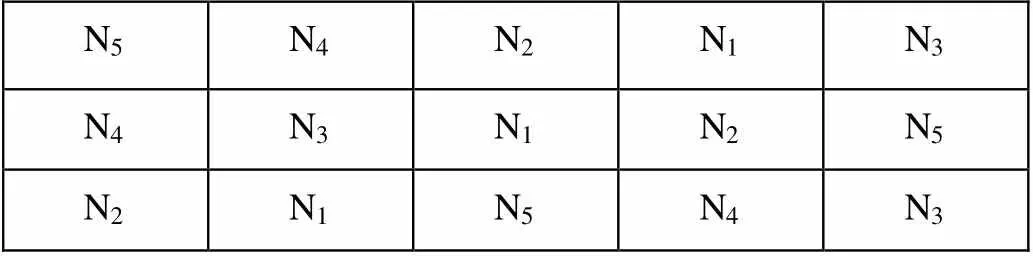
N5N4N2N1N3 N4N3N1N2N5 N2N1N5N4N3
1.1.2 冬小麦水、氮耦合试验 试验于2018年10月至2019年6月在中国科学院禹城站(116°34′13″E,36°50′00″N)内开展。品种为“维麦8号”。试验设2个水分处理,5个氮肥处理,共32个小区,各小区面积为10 m×5 m。其中,水分处理分别为90 mm和60 mm灌溉量;氮肥处理分别为0、15 000 kg·hm-2厩肥、15 000 kg·hm-2厩肥+100 kg·hm-2氮肥、15 000 kg·hm-2厩肥+200 kg·hm-2氮肥、15 000 kg·hm-2厩肥+300 kg·hm-2氮肥。除氮肥外,各小区其他管理措施相同,试验示意如图2所示。
1.2 遥感数据
分别在玉米大喇叭口期和抽雄前期,冬小麦拔节期开展无人机飞行,基于3DR Solo无人机(3DR,加利福尼亚,美国)搭载RedEdge M多光谱传感器(MicaSense,华盛顿,美国)获取相关影像数据。其中,RedEdge M传感器共有5个波段,中心波长分别为蓝光波段(475 nm)、绿光波段(560 nm)、红光波段(668 nm)、近红外波段(840 nm)和红边波段(717 nm)。无人机作业时,其航向和旁向的重叠率均设为75%,并在飞行前拍摄白板以用于后期将影像的DN值转换为反射率。其中,玉米试验的无人机飞行高度为50 m,对应影像空间分辨率约为3.5 cm;小麦试验的无人机飞行高度为30 m,对应影像空间分辨率约为2.0 cm。Pix4D ag软件(Pix4D,洛桑,瑞士)用来进行无人机影像的拼接和反射率计算。另外,基于厘米级误差差分GPS天宝GEO 7X(Trimble,加利福尼亚,美国)采集的高精度地面样点数据对影像做几何精校正。

N2W1N5W1N4W1N1W1N3W2N2W2N4W2N5W2 N1W1N4W1N3W1N5W1N2W2N5W2N1W2N4W2 N4W1N3W1N5W1N2W1N1W2N3W2N2W2N5W2 N1W1N5W1N2W1N3W1N4W2N1W2N5W2N3W2
1.3 改进的尺度参数自动确定方法
本研究在方法的基础上,综合考虑对象内同质性和对象间异质性提出改进方法。法借鉴了的理论,将对象及其相邻对象作为该对象的邻域对象集;计算各邻域对象集的局部方差,然后将所有对象的邻域对象集局部方差的算术均值作为值。其中,在计算邻域对象集局部方差时,将相邻对象的面积和中心对象与相邻对象的公共边长的乘积作为权重。的计算方法如公式(1)—(3)所示。可以看出,方法着重计算对象间异质性,没有充分考虑对象内同质性。因此,本研究在的基础上增加对象内同质性的计算,以标准差表示同质性,在公式(2)的基础上减去对象内标准差。此外,为了避免过分割和欠分割现象,将1/()作为对象内同质性的权重,将1-1/()作为对象间异质性的权重。本研究将改进后的方法称之为改进加权局部方差方法(improved weighted local variance,IWLV),计算如公式(4)和(5)所示。影像分割过程中,当分割对象与目标的尺寸相近时,对象间异质性最大,同质性最小,此时的值会大于在其他情况下分割结果的值,表现为最大。

式中,()为分割结果的加权局部方差;#为波段数;为波段集合;为波段集合中的一个波段(为了消除不同波段的量级差异,对各波段做归一化处理);为分割结果中的一个对象;()为对象的权重,在此设置为1,表示每个对象的在计算时同等重要;(,)为对象在波段上的加权局部方差,计算如公式(2)所示。

式中,()为对象的邻域对象集,包含本身;为()中的一个对象;()为的权重,由对象的面积和对象、公共边长的乘积计算而来;m()为对象在波段上的均值;m(())为对象的邻域对象集在波段上的加权均值,计算见公式(3)。



式中,()为分割结果的改进加权局部方差;(,)表示对象在波段上的改进加权局部方差,计算见公式(5)。

式中,STD()为对象在波段上的内部标准差,()为与对象相邻的对象个数。
数据模型优点在与对数据的转化能力,其可以资本成本决策工作人员输入的数据,自动的将数据具体化,通过与CAD图纸设计的有效结合,将数据转化为具体的模型,如图一所示,这样通过技术来实现数据模型的建立,很大程度的解决了上文提出的设计图纸精准度较低的问题。这样实现了对造价数据的有效转换,可以帮助资本成本决策工作人员对造价数据进行有效的分析,同时也缩短了工作时间,在提高资本成本决策工作效率的同时,达到了提高图纸精准度的目的。
1.4 数据分析方法
为验证方法,本研究将法与其进行比较。比较时,选择目前的主流影像分割方法之一均值漂移算法作为分割算法,并基于获取的玉米、小麦数据设计不同的比较情景。其中,玉米按2个生育期、5个氮肥处理分为10种分割场景(大喇叭口期不同氮肥处理用NS1表示,抽雄前期不同氮肥处理用NS2表示,表示数字1到5,对应图1所示不同施肥量);小麦按2个水分处理、5个氮肥处理也分为10种分割场景,分别用NW表示(表示数字1到5,表示数字1到2,分别对应图2所示不同施肥量和灌溉量)。需要说明的是每种情景所涉各重复小区作为一个整体参与分割。数据处理中,分别对不同场景进行分割尺度的选择和分割结果的验证。此外,根据解译经验,综合考虑影像分辨率和目标大小,本研究将尺度参数范围设置为5—90之间,并以5为步长递增,来计算评价函数值。
针对每种场景,首先分别计算不同尺度参数下的和值,得到各场景下和随尺度变化图;其次,分别以、最大值所对应的尺度参数值作为影像分割的最优尺度,获取对应分割结果;最后,在情景所涉各小区内分别随机布设1 m×2 m的矩形,在矩形内采用人机交互方式进行分割,用于评价和的精度。精度评价,采用单尺度对象精度(single-scale object accuracy,SOA)[28]作为评价指标。是计算分割结果和真实结果相似程度的指标,取值范围在0—1之间,具体计算如公式(6)—(7)所示。其中,越小,表明分割结果欠分割或过分割现象越严重;越大,说明分割结果和真实结果越接近。另外,人机交互分割时,以和方法获得的最优分割尺度参数取平均来分割影像,并采用人工目视解译的方法对分割结果进行修正。

式中,R表示参考分割影像中的对象;P表示待评价分割影像中的对象;#表示待评价分割影像中对象的个数。
2 结果
2.1 影像基本情况
不同作物的冠层结构不同,玉米和小麦的结构差异较大,因此通过低空无人机获取的影像也具有较大差异。从图3—4可以看出,本研究获取的小麦影像比玉米影像纹理上显得更为细腻,不同处理小区间颜色对比度也大。这是由于玉米个体较大,在高分辨率无人机影像中个体信息体现得比较明显,影像纹理上也显得更为粗糙;在不同的水、肥处理下,各小区小麦展现出明显的长势差异,整体上随水、肥的增加长势更优。另外,对比图3-b和图3-c,可以看出处于玉米抽雄前期的植株比大喇叭口期的植株更加茂密。总体来说,本研究获取的数据具有较复杂的场景,能为方法间的对比提供很好的支撑。

N1—N5分别表示0、70、140、210、280 kg·hm-2氮肥处理
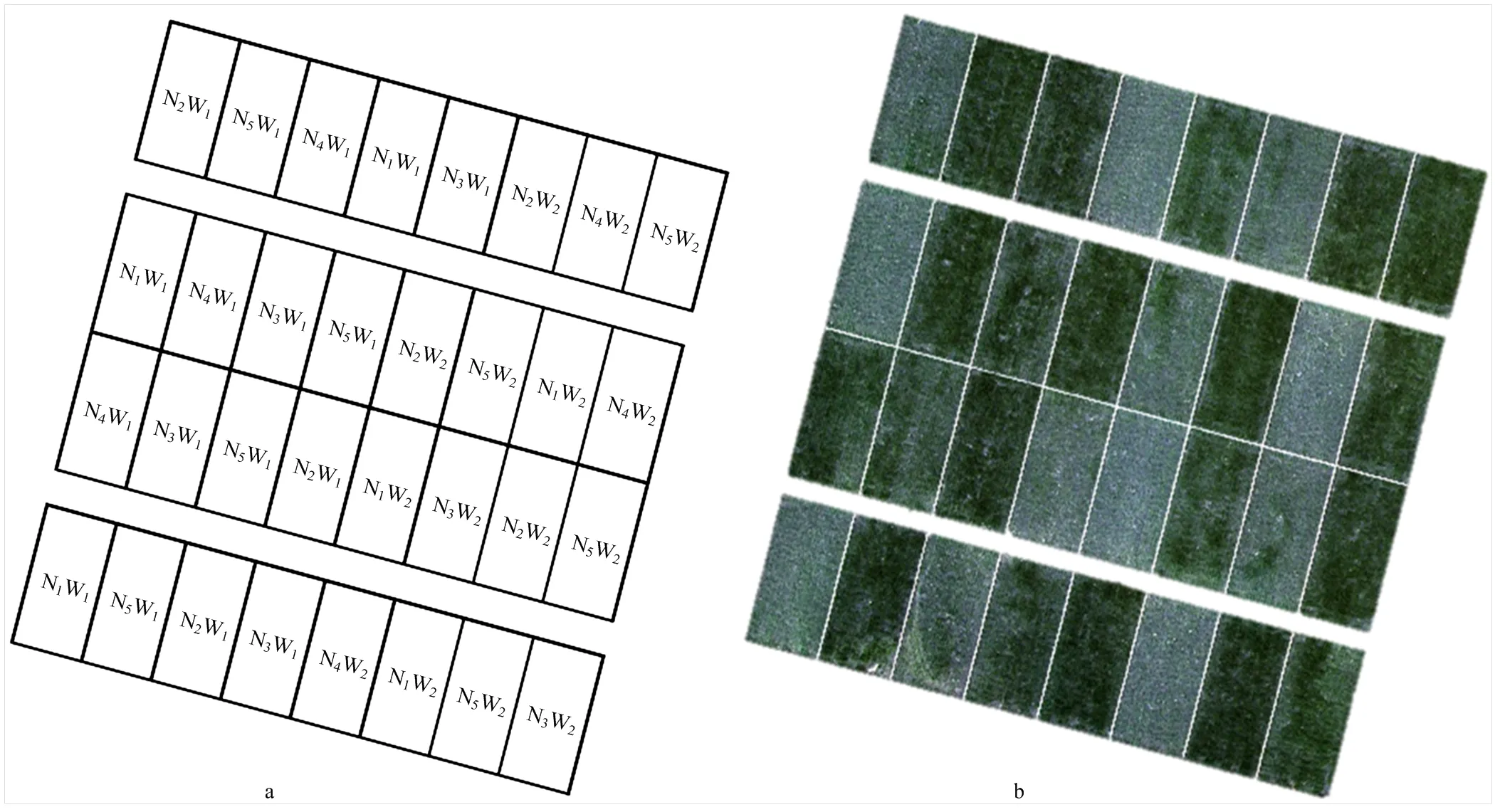
W1:90 mm灌溉量;W2:60 mm灌溉量;N1:不施肥;N2:15 000 kg·hm-2厩肥;N3:15 000 kg·hm-2厩肥+100 kg·hm-2氮肥;N4:15 000 kg·hm-2厩肥+200 kg·hm-2氮肥;N5:15 000 kg·hm-2厩肥+300 kg·hm-2氮肥
2.2 玉米影像分割结果
2.2.1 最优尺度参数选择 各种场景下、随尺度参数值变化情况如图5所示。可以看出,相对于,随尺度参数增大,先上升后下降的趋势更加明显。这表明增加考虑对象内部同质性后,法比法对分割尺度变化引起的分割差异更加敏感。另外,各场景基于法和法选定的最优尺度参数值如表1所示。从表中可以看出,各分割场景基于所选的尺度参数值都比法所选的尺度参数值小,说明法相对于法倾向把影像分割得更细。此外,对比不同生育期的分割结果,可以发现玉米抽雄前期各场景下的最佳尺度参数值普遍比大喇叭口期的相应尺度参数值小。这主要是因为随着植株生长,叶片相互交织,原本大块的裸露土壤由于被覆盖形成零碎的裸露土壤斑块,识别这些小土壤斑块需要更小的尺度参数。对比各生育期不同处理的分割结果,各处理最优分割尺度值未体现出规律性变化。
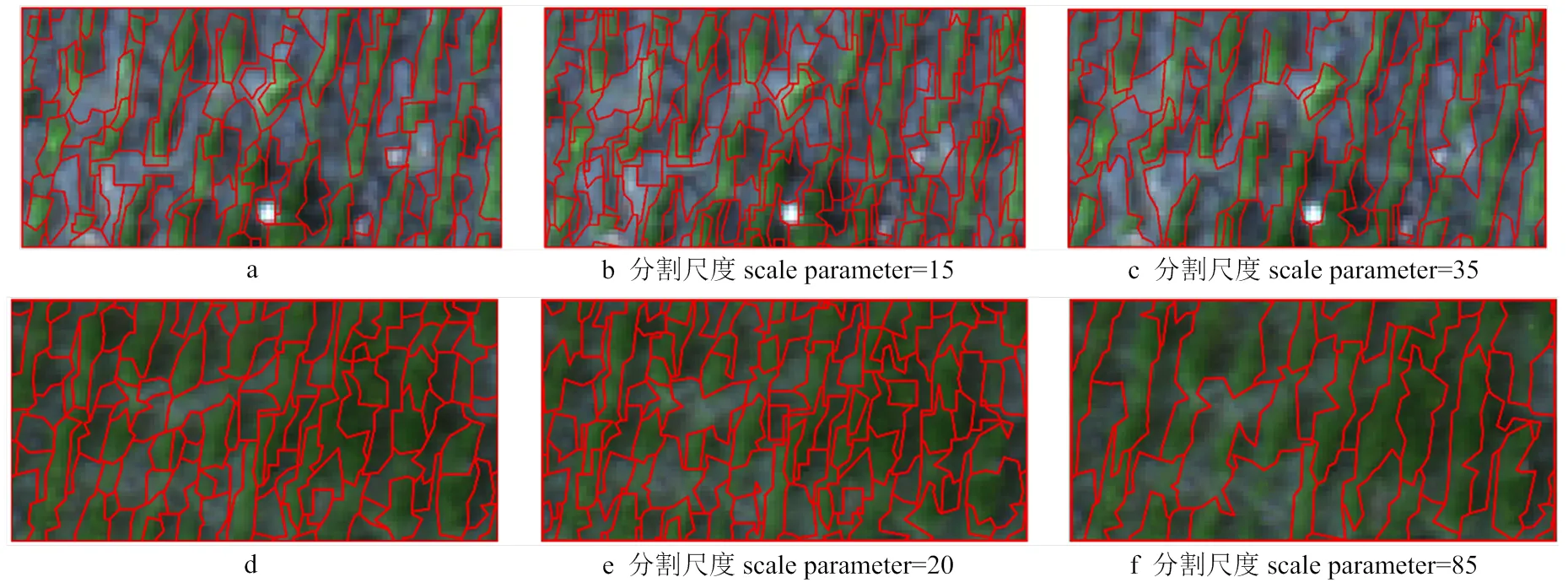
2.2.2 分割精度评价 如前所述,在各分割场景下所涉每个小区中随机布设一个1 m×2 m的矩形,在矩形中采用人机交互方式进行分割,将结果用以评价法和法在其选择的尺度下分割结果的精度。图6展示了各矩形分布情况,各场景下计算的法和法的值如表2所示。可以看出,各情景下基于法的值要比法高。另外,图7展示部分影像人机交互分割结果和分别基于法和法选择尺度下的分割结果。其中,展示样区位置如图6所示。从图中可以看出,所选尺度对应的分割结果与参考分割结果更接近,而所选尺度对应的分割结果则存在较为明显的欠分割。以上结果说明,基于玉米各场景影像,方法分割的结果精度更高。

表1 基于玉米影像WLV法和IWLV法在各情景选择的最优尺度值

表2 基于玉米影像WLV法和IWLV法在各情景选择尺度下分割结果的SOA值
2.3 冬小麦影像分割结果
2.3.1 最优尺度参数选择 各种场景下、随尺度参数值变化情况如图8所示。与玉米结果类似,在各分割场景中,随着尺度参数增大,虽有波动但先上升后下降的趋势比方法更加明显。另外,在部分场景中,随尺度参数增大,呈先上升后平稳甚至上升的趋势,导致所选尺度参数值偏大。以上结果表明,相对于法,本研究提出的法在小麦不同场景下均能取得较稳健的结果。基于法和法选定的各场景尺度值如表3所示。从表中可以看出,2种方法除N1W1所选的尺度参数相同外,在其他各分割场景中,基于所选的尺度都比所选的尺度小,同样说明相对于倾向把影像分割得更细。此外,可以发现随着施氮量的增加,选定的最优分割尺度整体呈增大趋势。其主要原因是施氮量小时,小麦群体长势较弱,相对于施氮量大时,小麦群体长势旺盛的影像需要设置相对小的尺度来识别。不同水分处理,小麦长势差异不显著,因此,选定的最优分割尺度没有趋势性变化。
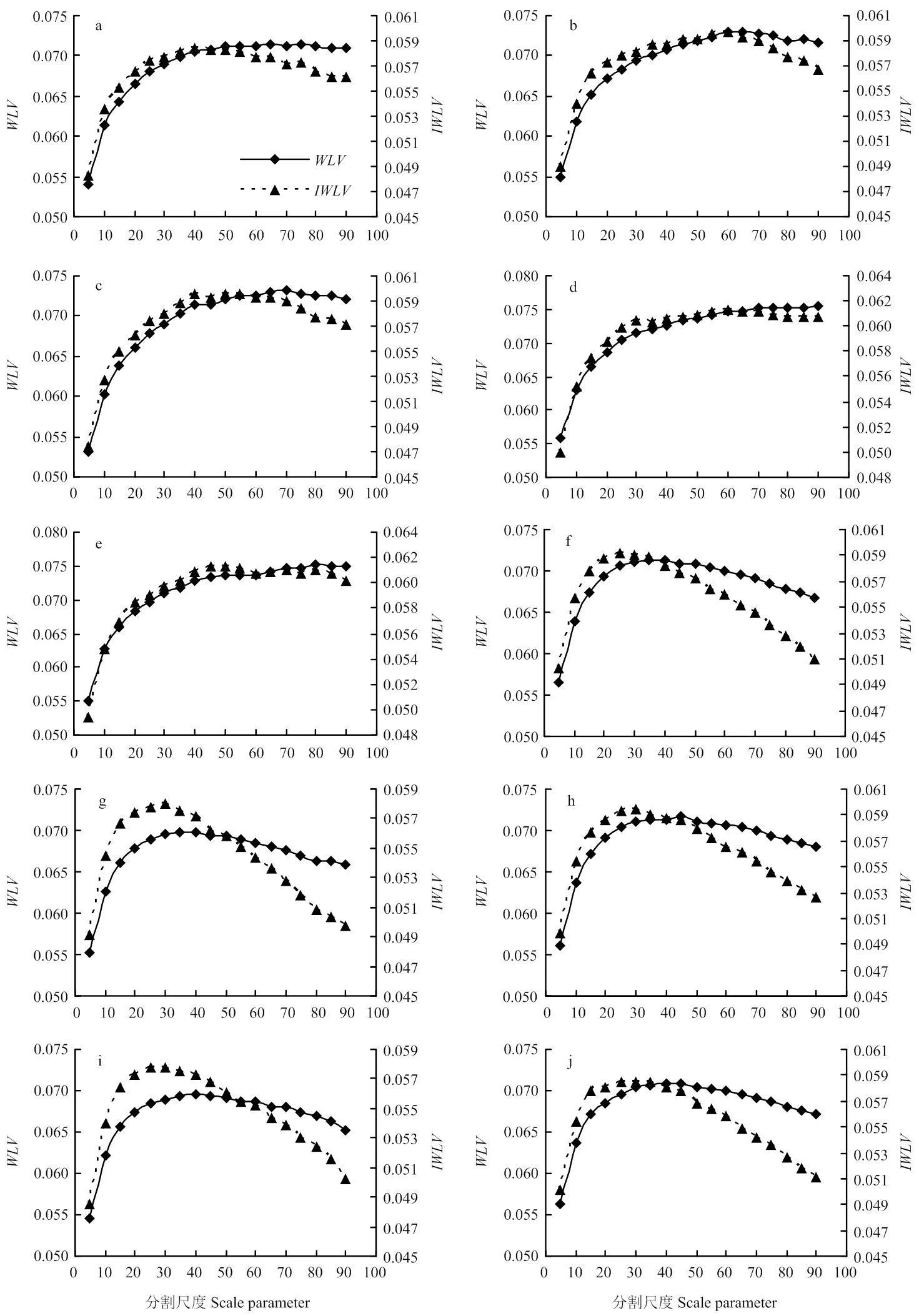
图a—e分别对应N1S1—N5S1,图f—j分别对应N1S2—N5S2
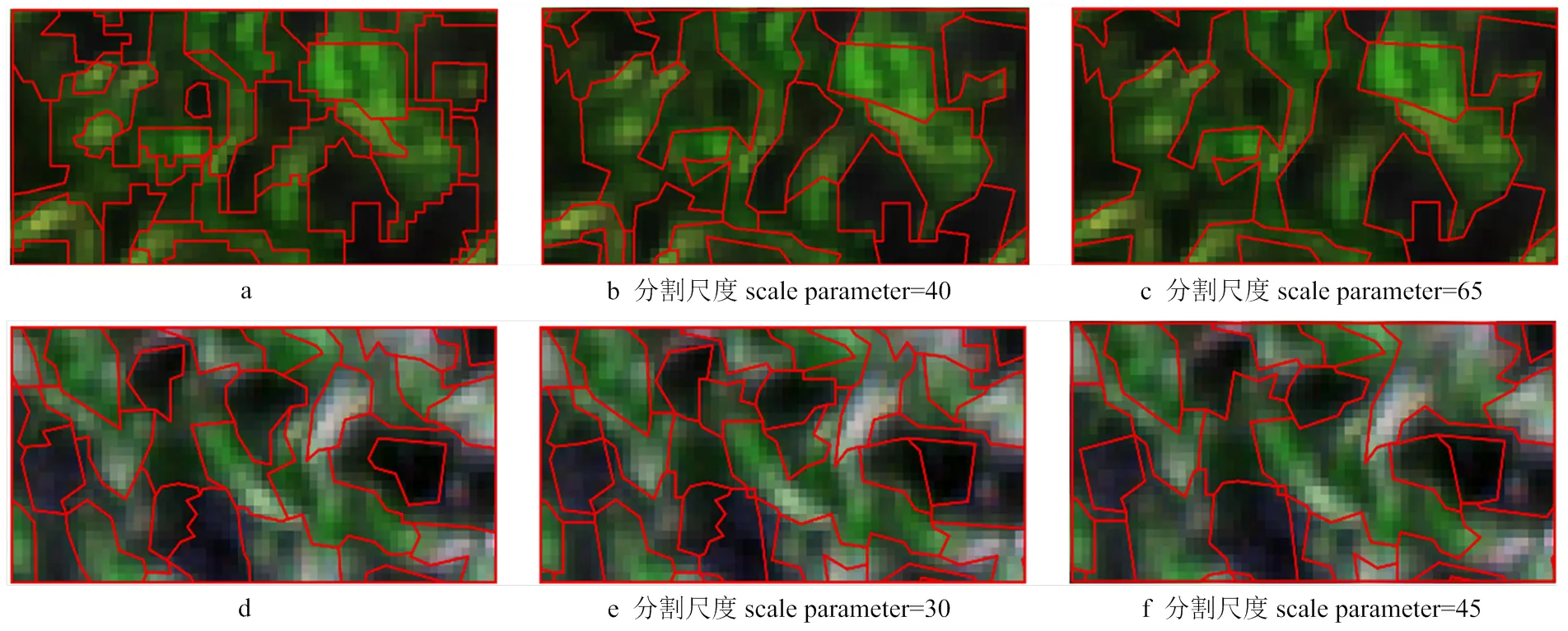
人机交互分割结果(a:N1S1场景;d:N3S2场景);基于IWLV法选择尺度分割结果(b:N1S1场景;e:N3S2场景);基于WLV法选择尺度分割结果(c:N1S1场景;f:N3S2场景)

表3 基于小麦影像WLV和IWLV法所选的各情景下最优尺度值
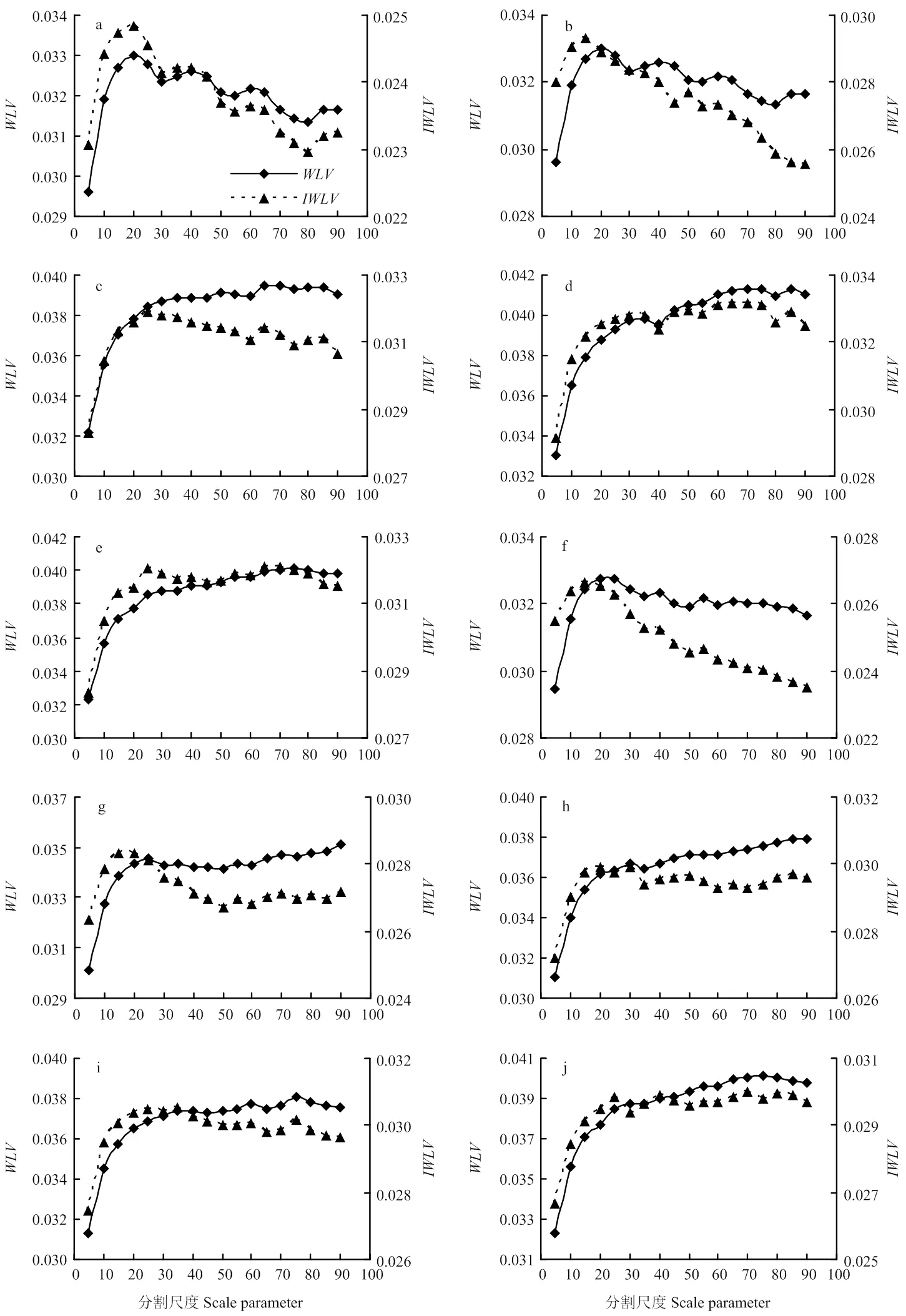
图a—e分别对应N1W1—N5W1,图f—j分别对应N1W2—N5W2 figure a-e denotes N1W1-N5W1 respectively, and figure f-j denotes N1W2-N5W2 respectively
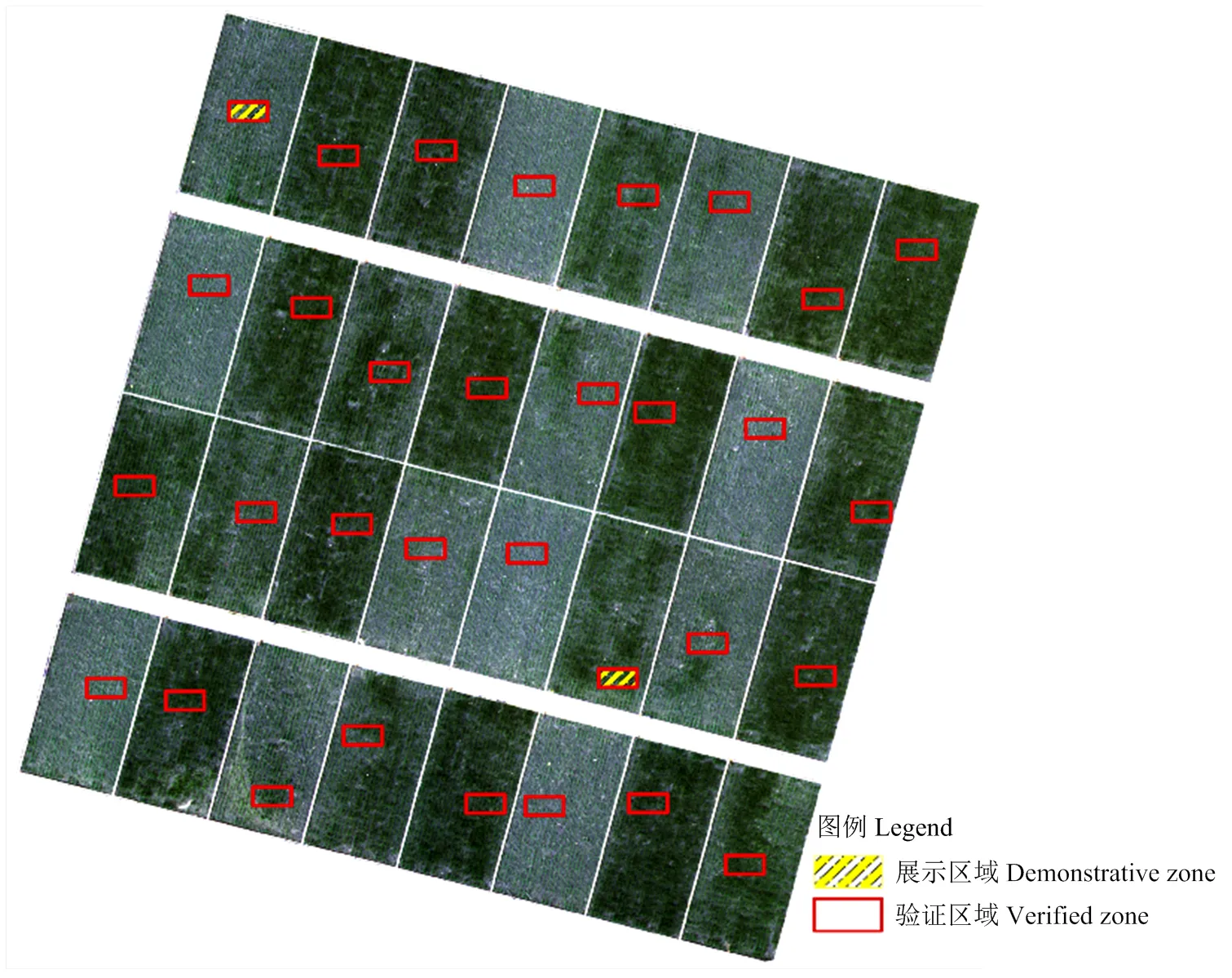
图9 小麦影像验证区域分布图

表4 基于小麦影像WLV法和IWLV法在各情景选择尺度下分割结果的SOA值
人机交互分割结果(a:N2W1场景;d:N3W2场景);基于IWLV法选择尺度分割结果(b:N2W1场景;e:N3W2场景);基于WLV法选择尺度分割结果(c:N2W1场景;f:N3W2场景)
3 讨论
相比于方法,本研究提出的方法既考虑了对象内部同质性,又考虑了对象间异质性,并用相邻对象个数作为权重参数,对同质性和间异质性赋予不同的权重,最终表明方法能较好解决方法欠分割的问题,在各分割场景下都取得了更好的分割效果。此外,在基于和等方法进行影像自动分割时,若分割尺度参数范围设置过大,则随着尺度的增大,分割对象从包含部分目标地物到包含1个、2个或者更多目标地物的过程中,计算的、值会有波动现象。因此,自动分割过程中,设定合适的尺度范围非常重要[29],先验知识是确定最优尺度参数值的重要辅助因素。
分割尺度与对象大小密切相关。同一分辨率影像下,对象越小其最优分割尺度越小。如玉米影像中,由于玉米在大喇叭口期、抽雄前期冠层基本覆盖垄间空隙,叶片与土壤交织形成的土壤斑块大小成为限定影像分割尺度的主要因素,所以随着玉米生长,抽雄前期的土壤斑块要比大喇叭口期的土壤斑块更为细碎,其需要的分割尺度也小于大喇叭口期的分割尺度;小麦影像中,由于拔节期小麦未封垄,垄间存在大片裸露地表,小麦冠层成为限定影像分割尺度的主要因素,所以长势越好,小麦整体冠层越大,其分割尺度越大。
此外,相对分辨率(影像分辨率与目标地物大小的比值)与分割精度密切相关。对比不同作物,可以看出玉米的分割精度整体高于冬小麦的分割精度。这是因为虽然小麦影像的分辨率(2.0 cm)高于玉米影像的分辨率(3.5 cm),但是小麦叶片长度约3—10 cm、宽度1 cm左右,玉米叶片长度在40—80 cm、宽度5 cm左右,分别对应2.0 cm和3.5 cm分辨率影像来说,小麦影像的相对分辨率要低于玉米影像的相对分辨率。所以,小麦分割结果的精度值(值)要小于玉米分割结果。
本研究只是基于小麦、玉米数据对法和方法进行对比评价,今后要进一步验证它们在其他作物上的应用效果。
4 结论
通过引入对象间同质性的计算,本研究对法进行改进,提出法以支撑农业无人机影像的自动分割。利用玉米和小麦不同生育期、不同长势条件下无人机影像,通过设计不同影像场景,对法和法的精度进行评价,结果表明,法经改进为法后,可有效抑制其欠分割现象。所有场景下,与人机交互方法获得的分割结果相比,基于法自动选择分割尺度的分割结果比基于法自动选择分割尺度的分割结果获得了更高的值,取得更好的分割效果。因此,改进方法提高了已有方法的精度,可以有效支撑农业无人机影像的自动分割,为精准农业管理提供技术支撑。
致谢:感谢徐志涛、刘金然、贾丹和曹庆军在田间试验过程中给予的支持和帮助;感谢李静老师为本研究工作的开展提供小麦试验基地。
[1] 陈鹏飞. 无人机在农业中的应用现状与展望. 浙江大学学报:农业与生命科学版, 2018, 44(4): 399-406.
CHEN P F. Applications and trends of unmanned aerial vehicle in agriculture., 2018, 44(4): 399-406. (in Chinese)
[2] Huete A R. A soil-adjusted vegetation index (SAVI)., 1998, 25(3): 295-309.
[3] QI J, CHEHBOUNI A, HUETE A R, KERR Y H, SOROOSHIAN S. A modified soil adjusted vegetation index., 1994, 48(2): 119-126.
[4] RONDEAUX G, STEVEN M, BARET F. Optimization of soil-adjusted vegetation indices., 1996, 55(2): 95-107.
[5] 张智韬, 边江, 韩文霆, 付秋萍, 陈硕博, 崔婷. 剔除土壤背景的棉花水分胁迫无人机热红外遥感诊断. 农业机械学报, 2018, 49(10):257-267.
Zhang z t, bian j, han w t, fu q p, chen s b, cui t. Diagnosis of cotton water stress using unmanned aerial vehicle thermal infrared remote sensing after removing soil background., 2018, 49(10): 257-267. (in Chinese)
[6] 陈鹏飞, 梁飞. 基于低空无人机影像光谱和纹理特征的棉花氮素营养诊断研究. 中国农业科学, 2019, 52(13): 2220-2229.
CHEN P F, LIANG F. Cotton nitrogen nutrition diagnosis based on spectrum and texture feature of images from low altitude unmanned aerial vehicle., 2019, 52(13): 2220-2229. (in Chinese)
[7] 刘帅兵, 杨贵军, 景海涛, 冯海宽, 李贺丽, 陈鹏, 杨文攀. 基于无人机数码影像的冬小麦氮含量反演. 农业工程学报, 2019, 35(11): 75-85.
Liu S b, Yang G j, Jing H t, Feng H k, Li H l, Chen P, Yang W p. Retrieval of winter wheat nitrogen content based on UAV digital image., 2019, 35(11): 75-85. (in Chinese)
[8] Blaschke T, Hay G J, Kelly M, Kelly M, Lang S, Hofmann P, Addink E, Feitosa R Q, van der Meer F, van der Werff H, van Coillie F. Geographic object-based image analysis – Towards a new paradigm., 2014, 87(100): 180-191.
[9] Meneguzzo D M, Liknes G C, Nelson M D. Mapping trees outside forests using high-resolution aerial imagery: A comparison of pixel-based and object-based classification approaches., 2013, 185(8): 6261-6275.
[10] Torres-Sánchez J, López-Granados F, Peña J M. An automatic object-based method for optimal thresholding in UAV images: Application for vegetation detection in herbaceous crops., 2015, 114: 43-52.
[11] 韩文霆, 张立元, 张海鑫, 师志强, 苑梦婵, 王紫军. 基于无人机遥感与面向对象法的田间渠系分布信息提取. 农业机械学报, 2017, 48(3): 205-214.
HAN W T, ZHANG L Y, ZHANG H X, SHI Z Q, YUAN M C, WANG Z J. Extraction method of sublateral canal distribution information based on UAV remote sensing., 2017, 48(3): 205-214. (in Chinese)
[12] Desclée B, Bogaert P, Defourny P. Forest change detection by statistical object-based method., 2006, 102(1): 1-11.
[13] Baumgartner J, Gimenez J, Scavuzzo M, Pucheta J. A new approach to segmentation of multispectral remote sensing images based on MRF., 2015, 12(8): 1720-1724.
[14] Johnson B A, Bragais M, Endo I, Magcale-Macandog D B, Macandog P. Image segmentation parameter optimization considering within-and between-segment heterogeneity at multiple scale levels: Test case for mapping residential areas using landsat imagery., 2015, 4(4): 2292-2305.
[15] 殷瑞娟, 施润和, 李镜尧. 一种高分辨率遥感影像的最优分割尺度自动选取方法. 地球信息科学学报, 2013, 15(6): 902-910.
Yin R j, Shi R h, Li J y. Automatic selection of optimal segmentation scale of high-resolution remote sensing images., 2013, 15(6): 902-910. (in Chinese)
[16] KIM M, MADDEN M, WARNER T. Estimation of optimal image object size for the segmentation of forest stands with multispectral IKONOS imagery//BLASCHKE T, LANG S, HAY G J.. Berlin, Germany: Springer Berlin Heidelberg, 2008: 291-307.
[17] DrǎguT L, Tiede D, Levick S R. ESP: a tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data., 2010, 24(6): 859-871.
[18] DrăguT L, Csillik O, Eisank C, Tiede D. Automated parameterisation for multi-scale image segmentation on multiple layers., 2014, 88: 119-127.
[19] Johnson B, Xie Z. Unsupervised image segmentation evaluation and refinement using a multi-scale approach., 2011, 66(4): 473-483.
[20] Espindola G M, Camara G, Reis I A, Bins L S, Monteiro A M. Parameter selection for region‐growing image segmentation algorithms using spatial autocorrelation., 2006, 27(14): 3035-3040.
[21] Georganos S, Lennert M, Grippa T, Vanhuysse S, Johnson B, Wolff E. Normalization in unsupervised segmentation parameter optimization: A solution based on local regression trend analysis., 2018, 10(2): 222.
[22] 何敏, 张文君, 王卫红. 面向对象的最优分割尺度计算模型. 大地测量与地球动力学, 2009, 29(1): 106-109.
He M, Zhang W j, Wang W h. Optimal segmentation scale model based on object-oriented analysis method., 2009, 29: 106-109. (in Chinese)
[23] Yang J, Li P, He Y. A multi-band approach to unsupervised scale parameter selection for multi-scale image segmentation., 2014, 94: 13-24.
[24] Yang J, He Y, Weng Q. An automated method to parameterize segmentation scale by enhancing intrasegment homogeneity and intersegment heterogeneity., 2015, 12(6): 1282-1286.
[25] 张俊, 汪云甲, 李妍, 王行风. 一种面向对象的高分辨率影像最优分割尺度选择算法. 科技导报, 2009, 27(21): 91-94.
ZHANG J, WANG Y J, LI Y, WANG X F. An object-oriented optimal scale choice method for high spatial resolution remote sensing image., 2009, 27(21): 91-94. (in Chinese)
[26] Woodcock C E, Strahler A H. The factor of scale in remote sensing., 1987, 21(3): 311-332.
[27] 王志华, 孟樊, 杨晓梅, 杨丰硕, 方豫. 高空间分辨率遥感影像分割尺度参数自动选择研究. 地球信息科学学报, 2016, 18(5): 639-648.
Wang Z h, Meng F, Yang X m, Yang F s, Fang Y. Study on the automatic selection of segmentation scale parameters for high spatial resolution remote sensing images., 2016, 18(5): 639-648. (in Chinese)
[28] Zhang X, Xiao P, Feng X, Feng L, Ye N. Toward evaluating multiscale segmentations of high spatial resolution remote sensing images., 2015, 53(7): 3694-3706.
[29] Böck S, Immitzer M, Atzberger C. On the objectivity of the objective function-problems with unsupervised segmentation evaluation based on global score and a possible remedy., 2017, 9(8): 769.
A Method for the Automatic Determination of Scale Parameter during Segmenting Agricultural Drone Images
SHI YaJiao1, 2, CHEN PengFei1, 3
(1Institute of Geographical Science and Natural Resources Research, Chinese Academy of Sciences/State Key Laboratory of Resources and Environment Information System, Beijing 100101;2University of Chinese Academy of Sciences, Beijing 100049;3Jiangsu Center for Collaborative Innovation in Geographical Information Resource Development and Application, Nanjing 210023)
【】The automatic extraction of crop planting area in the image is of great significance for promoting the application of high-resolution drone images in precision agriculture. At present, the method based on designing segmentation evaluation function is most commonly used in the study of automatically determining segmentation scale parameters. In order to meet the needs of high-precision automatic segmentation of agricultural drone images, an improved evaluation function was proposed to solve the defects of the Weighted Local Variance () method in this study, and the proposed method was verified based on field experiments of different crops.【】With considering thatmethod does not consider the internal homogeneity of segmented objects, this study designed the Improved Weighted Local Variance () method with adding the calculation of inter-object homogeneity on the basis offormula. The nitrogen experiments of corn and water and nitrogen coupling experiment of wheat were designed. During corn and wheat growing season, drone images were obtained in different growth stages with crop in different vigor. Based on the obtained UAV images, different scenarios were set. The mainstream segmentation algorithm was combined withmethod andmethod to perform image segmentation, respectively. Their segmentation results were compared with human-machine interactive segmentation results, and evaluated based on Single-scale Object Accuracy ().【】The selected scale parameter by themethod tended too large, which resulted in under-segmentation during segmenting images. While, based on the selected scale parameter bymethod, the segmentation result was correspond well with human-machine interactive segmentation results. Themethod had highervalues for all designed scenarios.【】Compared with themethod, the proposedmethod in this study had higher accuracy when determining the segmentation scale parameter.
scale parameter; image segmentation; drone image; improved weighted local variance method

10.3864/j.issn.0578-1752.2020.17.007
2019-11-05;
2020-02-09
国家自然科学基金(41871344)、国家重点研发计划(2017YFD02015,2017YFD0201501-05)
石雅娇,E-mail:shiyj.17s@igsnrr.ac.cn。通信作者陈鹏飞,E-mail:pengfeichen@igsnrr.ac.cn
(责任编辑 杨鑫浩)
猜你喜欢
廉政瞭望·下半月(2021年5期)2021-07-20
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
意林(2018年3期)2018-03-02
现代情报(2017年4期)2017-05-18
职教论坛(2017年4期)2017-03-13
太空探索(2016年5期)2016-07-12
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
财经科学(2014年7期)2015-04-20
时代英语·高三(2014年5期)2014-08-26
职业技术教育(2014年7期)2014-08-15