基于视觉随动技术的工业机器人应用研究
2020-09-10 20:23:46李野
内燃机与配件 2020年18期
李野
摘要:通过应用机器视觉技术在抓取效率与识别精度方面的优势,同时结合随动跟踪技术完成在线实时跟踪,本文结合视觉技术与随动跟踪技术并应用SCARA机器人,实现物体的自动识别、运动抓取、准确装箱,对研究机器人在运动控制领域具有重要意义,同时也为机器人其他应用方向提供一种有效的解决方案。
关键词:工业机器人;视觉;跟随运动
0 引言
随着现代技术的发展,在分拣装箱领域对效率的要求、灵活性的要求也越来越高,以往的分拣装箱系统采用物料停止-对中的模式,这种模式大大的增加了系统的响应时间,降低了生产效率,同时设备的频繁启停、反复运动对使用寿命有较大影响。如何实现自动识别-跟随抓取对分拣装箱系统具有重要的意义,本文结合视觉定位技术、随动跟踪技术,并应用SCARA机器人系统实现一套完整的分拣-装箱系统,为机器人在行业中的应用提供有效的解决办法。
1 机器视觉技术
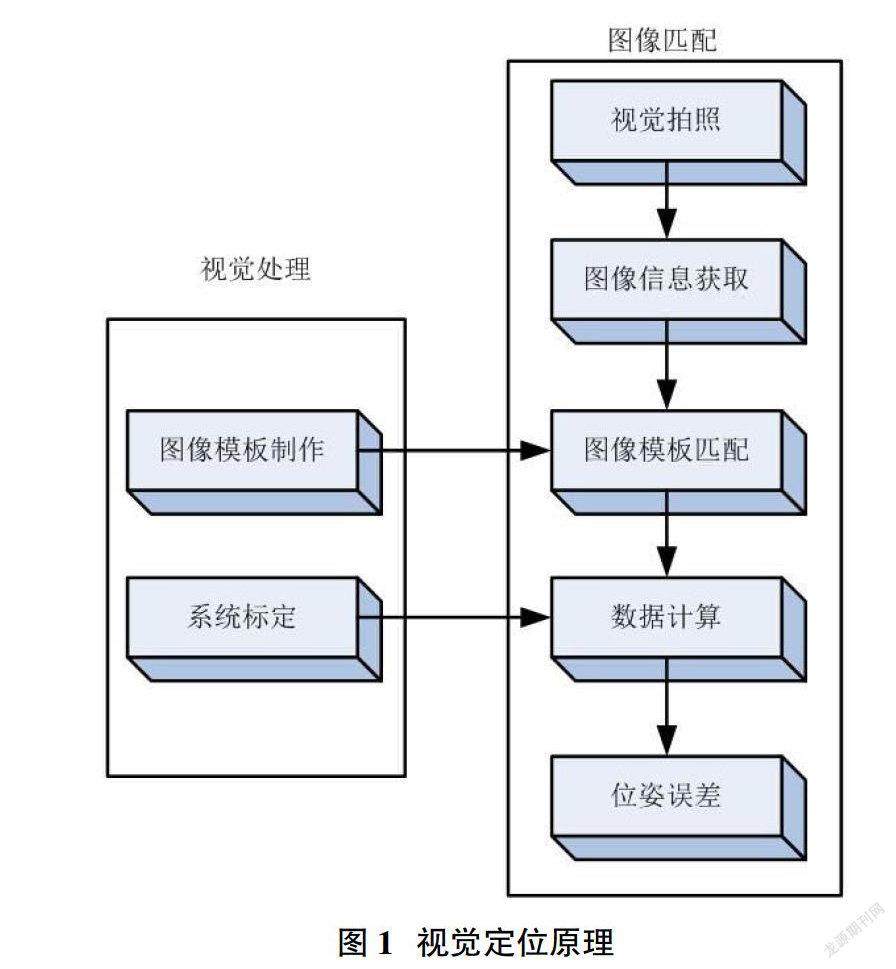
机器视觉技术通过视觉摄像机对物体进行拍照处理,获取物体图像信息,模拟人眼视觉的功能,通过视觉传感、图像采集、图像处理等多个环节[1,2],可以实现对物体的自动定位、识别、分类、比对,最终将处理的数据结果下发给执行运动机构,实现相应目标物体的抓取、摆放等动作。机器视觉技术通过预先设定的图像模板,进行图像的匹配,通过图像匹配实现物体的识别,同时在结合系统的标定参数进行视觉系统的计算,工作原理如图1所示,最终计算出位姿偏差。
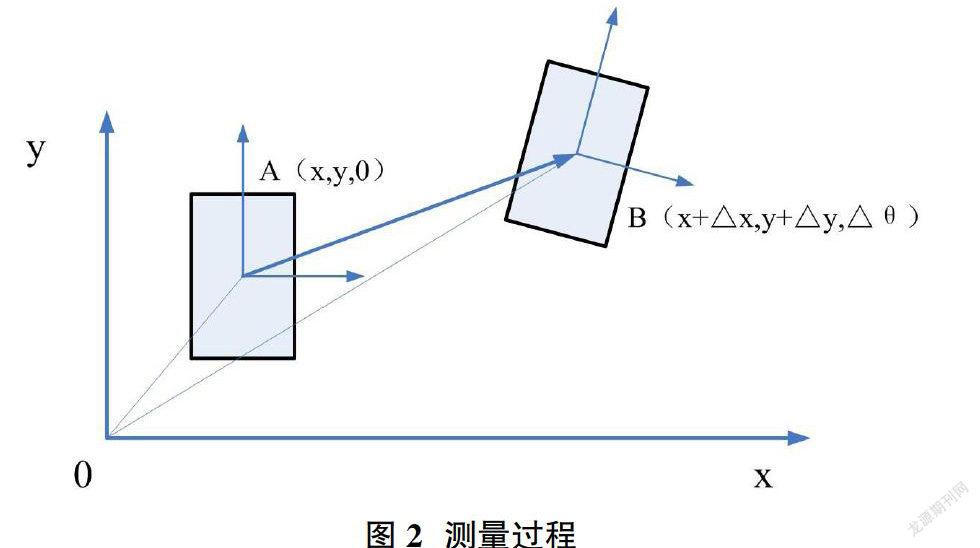
在2D视觉应用中,如图2所示,标定物体坐标参数点A,并通过上述图像匹配方法,获取图像位姿信息,计算出图像位姿点B,通过点A与点B在基础坐标系中的差值,最终可以计算出目标物体偏差值△x,△y,△θ,即平面物体的三个位姿偏差数据,将偏差发送给执行运动机构实现目标物体的搬运抓取。通过机器视觉能够采集制造过程中的多个图像[3]并通过各系统中的坐标系变换,得到目标物体的位姿信息,可使执行运动机构抓取目标物体的准确度得到很大程度的提高。
2 随动跟踪技术
执行运动机构能够按照预定的速度,在一定范围内能够与已知的理想轨迹相一致[4,5],并以相同的速度与运动物体共同运动,从而实现轨迹路径的跟踪过程,通过轨迹的跟踪,能够完成目标物体的动态抓取过程,动态的抓取过程能够很大程度上提升抓取的效率,同时随动控制方式与机器人相结合,能够更大限度的提升机器人的应用空间及场景。
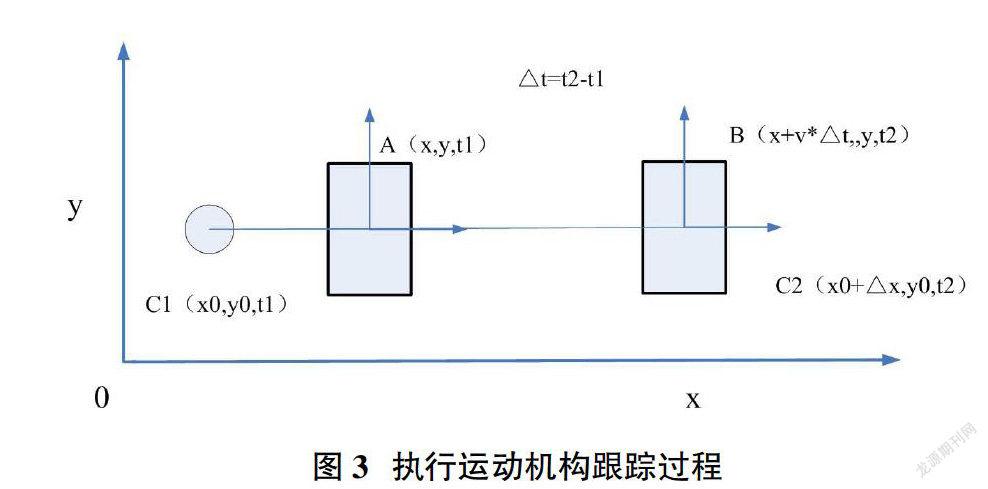
执行运动机构起点为C1,在t1时刻,目标物体的起点位置为A,在△t时间内,目标物体到达B点,同时执行运动机构在B点位置与目标物体速度相同,从而实现在△t时间内跟踪到目标物体的目的,如图3所示在此运动过程中目标物体是以恒定的速度v运行。在实际应用过程中,由于执行运动机构的结构、行程等因素限制,在△t时间内,执行运动机构运行的距离不能超出其运行最大行程范围,一旦超出执行运动机构将无法在有效的时间内跟踪到目标物体。
3 结合视觉、随动跟踪技术的应用
通過视觉系统对输送的目标物体进行拍照,确定目标物体的位姿,并以SCARA机器人作为目标物体搬运执行机构,实现目标物体的自动识别与定位,同时通过随动跟踪技术,进行实时的跟随运动,从而实现目标物体的动态抓取过程,保证了目标物体的连续运行,从而提高了系统的生产效率。系统布置如图4所示,其中实线部分为视觉拍照区域,在该区域内均可实现目标物体的视觉定位,点划线区域为跟随抓取区域,在该区域内能够实现目标物体的跟随运动及抓取动作,目标物体以四个为一组放置到指定料盒中,图4中圆形标记位置为目标物体的放置料盒,同样料盒定位方式任然以视觉拍照方式进行精确定位,确定放置位置的准确性。
在本系统中,设定视觉系统的拍照视场为800*800mm,物体在此区域内均可实现目标物体位置信息的确定,由于视觉系统受到环境光照影响比较大,为保证在视觉拍照时能够具有一个良好的环境光照条件,将视觉相机的拍照区域设定成封闭区域并加以遮光防护,保证系统能够在一个稳定的环境光照下,确保目标物体图像采集的稳定性。另外,由于SCRAR机器人的运动范围限制,在机器人工作的有效区域内,均可以实现目标物体的跟踪抓取,一旦SCARA机器人的跟随位姿点超出其运动范围,机器人系统将自动漏过该物体,以便后续物体的抓取。在SCARA机器人系统中,通过设计机器人的跟随距离、跟随速度等参数,实现SCARA机器人参数的匹配,最终实现目标物体的跟随运动,完成物体的运动跟踪抓取过程。
为保证物体输送的稳定性及可靠性,以伺服电机作为驱动装置,采用同步带传动方式,减少带传动打滑现象,从而提高物体输送精度,保证了目标物体输送的稳定与可靠,并且与实际应用相结合,配置稳定运行线速度,有利于提高抓取的准确性与跟随运动的可靠性,从而提高了系统的稳定性。
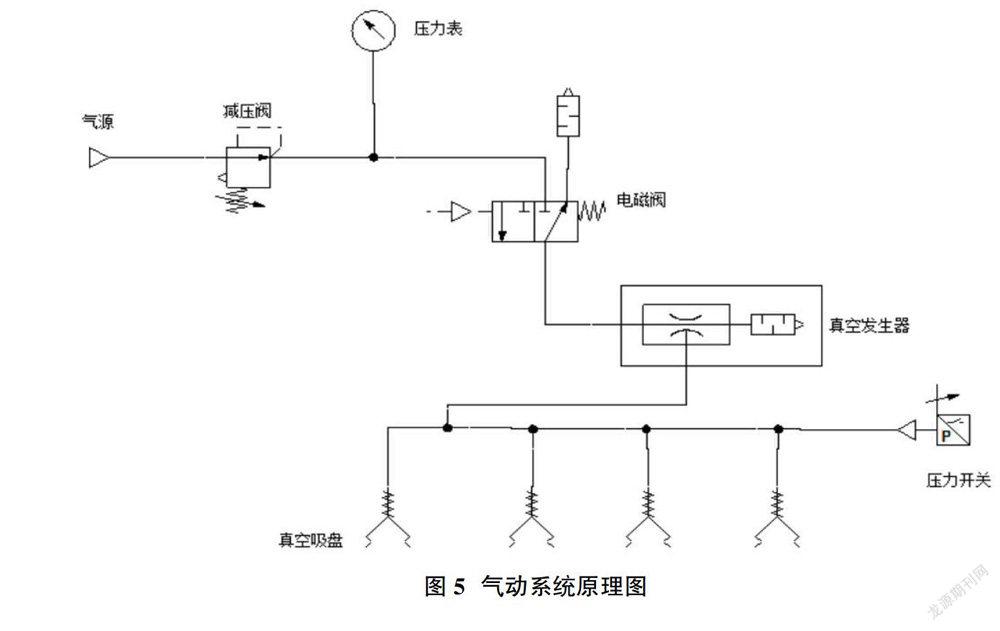
根据搬运目标物体的材质、重量、形状等信息,采用真空吸附的方式实现目标物体的快速抓取搬运,为了实现快速的响应过程,采用快速响应电磁阀及大流量真空发生器,同时配备有真空压力反馈,确保系统的稳定可靠,控制原理如图5所示。
利用SCARA机器人的快速响应,使得该生产线的生产节拍能够达到3.5s每件,可在有效的时间内对来料进行分拣搬运,同时保证了系统的连续运转,避免输送系统重复启停,大大提高了生产线的效率。同时,该系统的建立解决了生产工位单调、重复的劳动模式,生产线实现用工减少每班3人次,每天6人次的用工,极大的提高了经济效益。
4 结束语
通过对视觉系统、随动跟踪系统的阐述,并应用两种技术在机器人快速识别分拣系统中的应用,为无序分拣、动态分拣提供了一个良好的应用案例,为其技术在相关行业中的推广及应用起到示范作用,为机器人在更多领域的应用提供了一个良好的解决方案。
参考文献:
[1]张辰,等.视觉引导技术在SCARA机器人装配任务中的应用[J].传感器与微系统术,2019,38(2):157-160.
[2]盛华军,等.视觉图像技术与机器人工件抓取的协作应用[J].自动化与仪表,2020,35(2):37-46.
[3]杨旗,陈杰,崔玉博,等.基于视觉引导的ABB机器人定位与抓取[J].机械工程与自动化,2019(5):57-59.
[4]张日红,等.基于运动跟踪的工业机器人随动控制[J].现代农业装备,2018,5:63-66.
[5]江海天,等.工业机器人随动跟踪控制系统的设计[J].科技创新,2019,10:11.
猜你喜欢
科技创新与应用(2016年34期)2016-12-23 18:52:28
汽车科技(2016年6期)2016-12-19 20:40:37
科技创新导报(2016年21期)2016-12-17 12:23:00
中小企业管理与科技·上旬刊(2016年11期)2016-11-28 20:25:35
商情(2016年40期)2016-11-28 11:25:01
演艺科技(2016年10期)2016-11-26 22:12:27
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技视界(2016年18期)2016-11-03 23:15:51
青年文学家(2016年27期)2016-11-02 17:44:36
戏剧之家(2016年19期)2016-10-31 18:51:06