柔性自动化制造实训设备的硬件系统设计
2020-09-10 07:22傅康
内燃机与配件 2020年18期
傅康


摘要:基于西门子S7-200 型PLC设计柔性自动化制造实训设备硬件系统。本文首先概述了设备的框架结构及设计需求,其次对组成设备的各硬件模块进行了选型,并分析了相应的功能,最后对应用设备进行实训生产操作的流程进行了简述。本系统由来料、搬运、运料分拣和人机交互等硬件模块组成,能够精准识别来料加工产品的颜色和材质,并进行智能分拣,具有组态人机交互功能,方便操作人员远程操控系统,降低了直接操作设备部件的损耗率,可用于高校自动化类专业实训教学或物流企业包裹智能分拣,具有一定的实用推广价值。
关键词:柔性自动化制造实训设备;西门子S7-200 PLC;电气系统
1 柔性自动化制造系统概述
柔性自动化制造系统(简称FMS),是一种以计算机或微处理器作为控制核心,外接机器人、机械手、数控机床、自动化生产线、各类传感器、组态等构成的能够完成产品智能加工、运输和仓储保管的现代化智能制造系统。其特点为:智能化、柔性化、自动化和无人值守,是现代制造业发展最重要的辅助系统。伴随《中国制造2025》纲要的推出,近年来柔性制造系统在国内的研发和应用趋于白热化,很多典型的FMS系统被相继研发,如:2017年深圳市利和兴股份有限公司研发的FMS系统,2018年武汉华中数控股份有限公司研发的FMS系统等。应该说,FMS系统已成为现代制造企业生产应用的主流。
2 设备硬件设计需求和结构概述
2.1 设备设计需求
目前,市场上柔性自动化制造实训设备存在采购成本高昂、维护不便和人机交互体验不佳等问题,基于此,以优化采购研发成本支出、提升维护检修便捷性和增强人机交互使用体验为需求设计一款可用于高校实训和企业生产的柔性制造设备具有十分现实的意义。本文以西门子S7-200型PLC为控制核心部件,结合搬运机械手、MCGS组态设备、三相异步减速电机、各类传感器等设计模块组合式柔性自动化制造实训设备,以实现对国内工科类高校自动化专业柔性制造实训教学的辅助。
2.2 设备整体结构
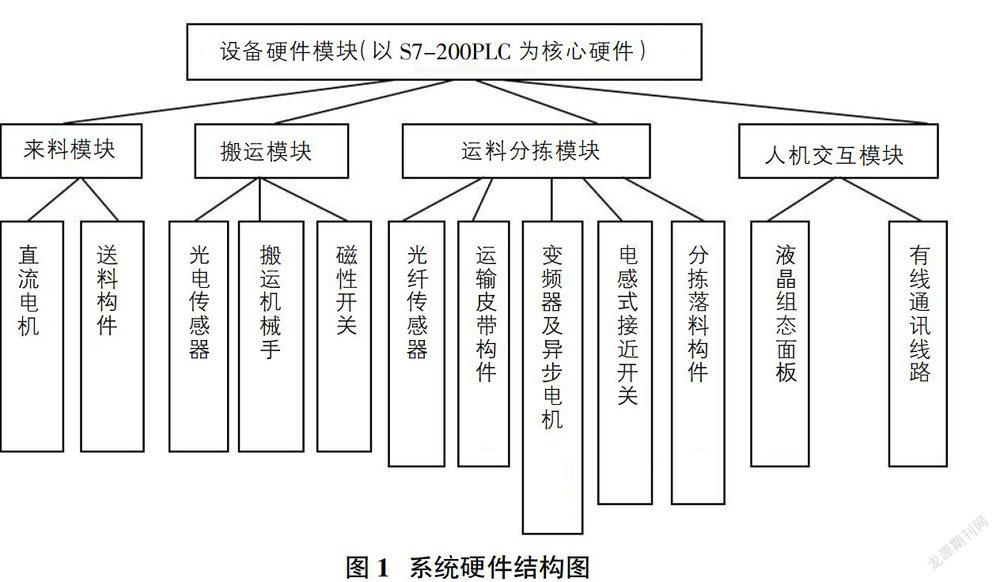
如图1,本系统以西门子S7-200型PLC为硬件核心,功能模块涵盖来料、搬运、运料分拣和人机交互四个子部分,各模块又由不同的硬件机构组成,相互配合能够完成对待加工产品来料识别、搬运传送、归类分拣和远程触摸控制等操作,具体的部件选型以经济性、维护便捷性和功能质量保障为原则。
3 设备硬件选型与功能模块设计
3.1 來料模块设计
来料模块用于本系统待传送分拣产品的初级传输,一旦该模块机构中检测到有物料产品置入,便会启动传输动力装置运送来料产品至搬运模块机构。该模块的硬件选型及功能描述如下:
①来料承载机构。
由来料装载盘、高度调节支架和固定装置构成,其中来料装载盘用于装载物料产品,为圆形或椭圆形盛料机构;高度调节支架和固定装置用于调节承载机构的高度和固定整个机构,机械安装上可根据来料的体积、重量等参数自行设计调整。
②来料运输机构。
由直流减速电机和拨料装置构成,拨料装置与直流减速电机的转轴连接,当电机转动时拨料装置一同转动运输物料产品,电机的型号根据实际需求选定。
③来料检测机构。
用于检测送料口是否有物料产品,倘若有产品则停止直流减速电机,并启动搬运机构,若送料口无产品则直流减速电机继续运转送料,该机构的核心部件为E3Z型光电传感器。
3.2 搬运模块设计
当来料口有物料产品时,便会启动搬运模块搬运物料至运输模块,可以说搬运模块是连接来料和运输模块的中间机构。在硬件设计上,该模块由2只单出双杆气缸、4只电控阀、5只磁性开关和1套机械搬运手组成,各硬件设备的选型及功能描述如下:
①单出双杆气缸。本设备的该类气缸由双联、摆动和标准三类气缸构成,其中双联气缸可实现对机械搬运手“伸出-缩回”动作的控制,摆动气缸可实现对机械搬运手“左摆-右摆”动作的控制,标准气缸可实现对机械搬运手“上升-下降”动作的控制。
②电控阀。用于启动/停止各单出双杆气缸的动作,设计上由PLC程序控制电控阀的导通和关断。
③磁性开关。即磁性传感器,用于检测机械搬运手的运动限位,以判断机械搬运手是否运动到限位位置。
④机械搬运手。包括机械手爪、手臂、节流阀、缓冲阀等部件,手爪通过抓紧和松开完成物料产品的抓取运输,实际用PLC编程进行控制。该模块的设计图如图2。
3.3 运料分拣模块设计
运料分拣模块是执行物料产品运输和分拣的机构,其中运输机构由三相异步减速电机和传送皮带组成,分拣机构由各类传感器、气缸、物料存储推送装置、变频器和电磁阀组成,各主要硬件选型和功能描述如下:
①三相异步减速电机。选用380V,40r/min的三相异步减速电机,电机运转轴与传送皮带绑定,电机运转时带动传送皮带运动,实现产品传输。
②传感器组。包含1个金属传感器(额定电压DC10-30V,检测距离2-5mm,用于检测金属材质产品)、2个光纤传感器(额定电压DC10-30V,检测颜色精度可调,用于检测不同颜色的产品)和1个光电传感器(额定电压DC10-30V,检测距离3-100mm,用于识别落料口是否有物料产品)。
③变频器。选用西门子MM440变频器。
④物料存储推送装置。由落料口、料槽、进气机构、推料气缸构成,各部件根据物料产品的体积、重量等指标机动选型。
3.4 人机交互模块设计
基于本设备的人机交互模块,实训或技术人员可用远程触摸的方式实现对系统工作状态的操作和监控,以体现出自动化远程控制的优势。该部分由1个昆仑通泰7寸液晶人机交互触摸屏和1套RS485通讯线缆组成,通讯线缆用于触摸屏与西门子S7-200型PLC之间的数据通信,具体的连接示意图如图3。
4 设备操控应用流程
本设备基于PLC进行产品自动化运输、识别、分拣循环控制,根据操控需要编写PLC梯形图程序后,实训或技术人员操控设备的流程为:
①启动系统。按下系统启动按钮SB1。
②初始化自检。系统启动后,将调用初始化程序进行自检,主要检测各硬件机构是否连接、有无损坏等,倘若存在问题则发出报警信号,同时停止系统运行。
③自动化制造循环运行。倘若系统自检无问题,则自动进入“运送来料-搬运物料-识别物料-分拣物料”的循环生产过程,整个过程中各类传感器检测系统运行状态,倘若出现掉料、过载、空载、误操作等故障,传感器能够自动检测并断电报警。
④通过MCGS触摸屏实现柔性自动化制造过程的操作及监控,若要停止系统运行,只需按下停止按钮SB2即可。
5 结语
通过硬件选型和各模块功能的设计,初步完成了柔性自动化制造实训设备硬件系统的设计,该设备硬件选型经济适用,各模块功能科学实用,完全能够作为一套物料产品的运输、识别、分拣和存储实训所用,具有一定的应用推广性。在下个阶段的设计中,将根据硬件设计完善系统软件设计、组态设计和机械结构设计等内容,并将硬件和软件整合起来设计若干实训项目,以使整个设备体现出实训实用价值。
参考文献:
[1]张贵军,陈安,王文,吴浪,李章维.模块化柔性制造综合实训教学管理系统开发[J].实验技术与管理,2017,34(12):161-163.
[2]杨娟,农应斌.智能制造实训设备现状研究[J].中国新技术新产品,2019(23):142-143.
[3]谢民雄.高校机械工程训练中实施柔性制造实训的探讨[J].产业与科技论坛,2019,18(06):192-193.
猜你喜欢
中国新通信(2022年3期)2022-04-11
现代企业(2021年11期)2021-12-08
中国计算机报(2019年29期)2019-09-18
现代职业教育·中职中专(2019年1期)2019-06-11
现代职业教育·高职高专(2018年5期)2018-05-14
农民致富之友(2018年7期)2018-05-04
现代职业教育·高职高专(2017年9期)2017-07-09
科技创新导报(2016年9期)2016-05-14
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
人民交通(2009年1期)2009-01-19