电动清扫车辆动力系统研究
2020-09-10 13:24石银宏
智能建筑与工程机械 2020年2期


摘 要:清扫车作为众多生活垃圾处理车中的一种,在当前已经得到了广泛应用。我国在“十二五”规划中明确提出“节能减排”要求,汽车行业的战略重点向着新能源汽车方向不断发展。作为新能源汽车的急先锋,电动汽车无疑被社会各界给予了厚望,当前新能源车辆逐渐的在清扫车辆中得到应用。基于此,对电动清扫车开展研究具有重要意义,本文主要分析了电动清扫车辆动力系统,研究在主副电机驱动行走模式下,清扫车辆双驱动的动力系统,以期为电动清扫车辆动力系统研究提供参考。
关键词:电动清扫车辆;动力系统;分析
中图分类号:U469.691 文献标识码:A 文章编号:2096-6903(2020)02-0000-00
0 引言
随着我国城市化进程的不断加快,各地区公共场所大量增加,这导致环境清扫工作日趋繁重。当前我国的环卫清扫工作与发达国家相比,机械自动化程度低,甚至部分地区还停留在依靠“一把扫帚”的工作模式。因此,未来环卫清扫工作的发展趋势必然是以机械化程度较高的清扫设备代替传统人工。清扫车辆作为一种新型的高效清扫设备,在许多城市已经成为日常环境清扫的主力军,清扫车经过多年的发展,已经从单一的清扫模式发展到多种形式共存的发展模式。基于动力系统不同,能够将清扫车辆分成纯电动模式、发动机模式、混合动力模式等。
1 电动清扫车辆动力系统
1.1 单电动机驱动
在清扫车辆的动力系统中,单电动机驱动主要是采用单电机来驱动车辆,进行日常的作业和行走,其电动机输出动力是利用机械传动装置,将动力传递给作业系统和行走系统,该动力系统主要应用于行驶道路较为平稳的中小型电动清扫车辆。该驱动模式的清扫车辆的动力系统主要采用机械传动[1]。研究发现作业系统执行结构与电动机转速两者之间呈现线性关系。清扫车辆在该作业系统下对于清扫车的工作效率将会产生严重影响,尤其是清扫车辆在复杂的路况进行作业和行走时,对于清扫效果影响更大,再加上分动装置复杂,所以如果受到撞击或是震动时,将会非常容易损坏,难以保证其可靠性[2]。
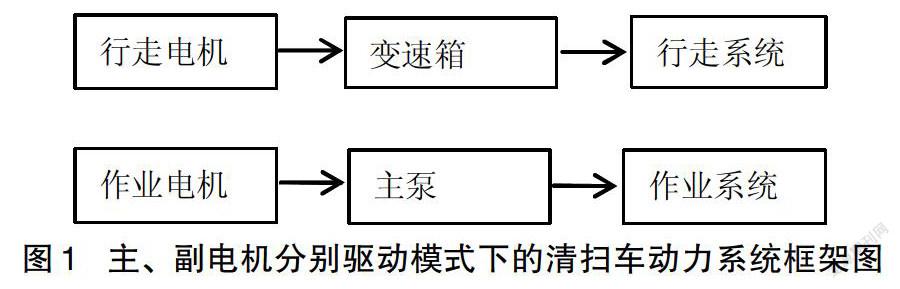
1.2 主、副电机分别驱动的动力系统
清扫车辆中的作业系统和行走系统分别由主、副电机的电力系统驱动,主电动机是为了驱动车辆行走,车辆的作业系统专门配备电机,用以驱动作业系统开展清扫工作。因此,车辆的主电机与副电机之间,分别驱动车辆的行走系统和作业系统,清扫车辆的两个系统之间互相独立,互不影响。如图1所示的主、副电机分别驱动模式下的清扫车动力系统。
1.3 驱动电机参数
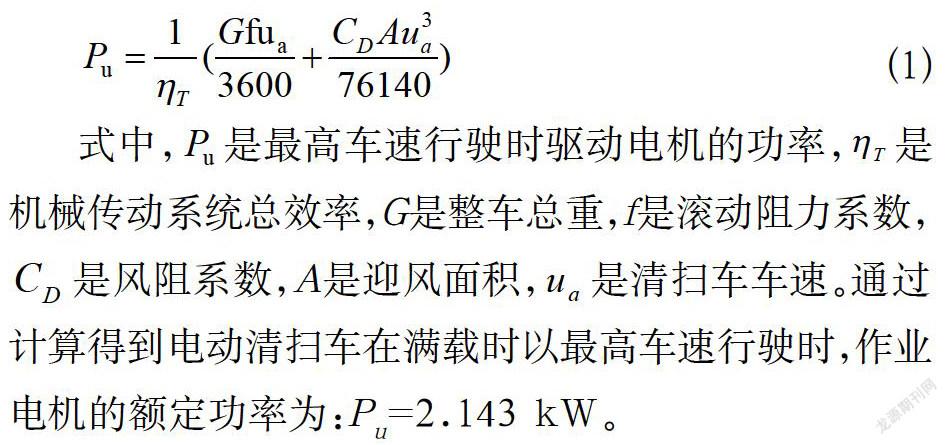
在非清扫状态下,当电动清扫车以最高速度行驶时,忽略坡道阻力和加速阻力得到电动清扫车功率平衡方程如下:
式中,是最高车速行驶时驱动电机的功率,是机械传动系统总效率,G是整车总重,f是滚动阻力系数,是风阻系数,A是迎风面积,是清扫车车速。通过计算得到电动清扫车在满载时以最高车速行驶时,作业电机的额定功率为:。
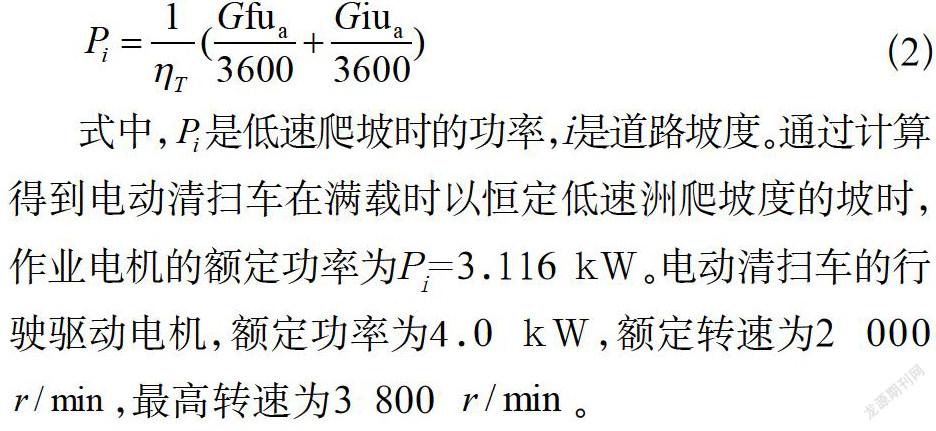
当电动清扫车以某一恒定低速度爬坡时,忽略空气阻力和加速阻力,得到电动清扫
车功率平衡方程如下:
式中,是低速爬坡时的功率,i是道路坡度。通过计算得到电动清扫车在满载时以恒定低速洲爬坡度的坡时,作业电机的额定功率为。电动清扫车的行驶驱动电机,额定功率为4.0,额定转速为2000,最高转速为3800。
2 电动清扫车辆的使用
清扫车的使用工况可分为行走工况和作业行驶工况两种。一辆电动清扫车,每天的车速随时间变化。对曲线数据进行分析统计可知,在清扫车开展日常行走过程中,其车辆的行驶速度大约在30~60km/h,最高在70km/h,因此,为了满足电动清扫车辆在日常行走时的需求,电动机的高效区需要选择在高速区。但是因为在作业行驶工况时,电动清扫车的车速平均为14.2km/h,而此时的车辆行驶工况在电机低速区。所以,如果采用单电机驱动动力系统,将会出现电动清扫车辆动力系统无法同时兼顾行走和作业的情况[3]。
3 主副电机驱动行走模式下,清扫车辆双驱动的动力系统
通过分析上述情况,对一种新的电动清扫车辆的动力系统进行分析。
3.1 动力系统的机械构成
电动清扫车辆的动力系统的行走电机以及作业电机,分别驱动着作业系统和行走系统,同时还在车辆中增加了分动箱。其主要目的是為了在车辆作业电机休息时,可以通过耦合装置将行走电机和作业电机的动力进行耦合。以此来共同驱动行走系统,使得电动清扫车辆的行走速度得到良好提升。电动清扫车辆的控制系统协调两台电机,使电动清扫车辆能够具备同时行走和作业能力。当选择清扫车辆的电机时,其行走电机只需满足日常作业时的低档车速即可。如果电动清扫车辆处于纯行走状态下,那么高挡车速的动力差可以利用作业电机来进行补充,因此行走电机使用较小的电机,这样成本会更低,如图2所示:
该清扫车辆在作业模式下,分动箱不会选择从作业电机中取力,在此模式下,力传递装置将会关闭,此时作业电机会带动电动清扫车辆的作业系统进行工作。行走电机带动行走系统进行行走。所以,该电动清扫车辆的两个系统在此时呈现出独立状态,分别驱动两个系统进行运作。在行走模式下,作业系统会停止工作。分动箱取出作业电机的动力后,电动清扫车辆会通过耦合装置与行走电机相耦合,并利用变速箱促使行走系统开展行走[4]。
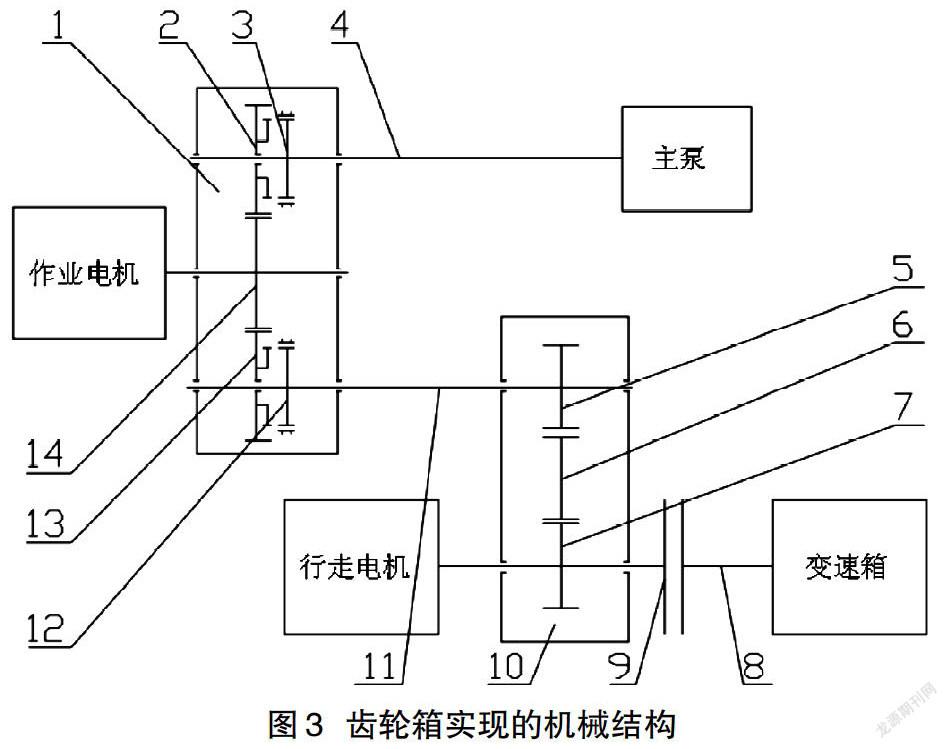
3.2 驱动系统的机械结构
电动清扫车辆动力系统采取齿轮箱的机械结构如图3所示。作业电机的14分动箱齿轮呈现为连接状态,13分动箱齿轮、2分动箱齿轮以及4、11分动箱两输出轴则是通过轴承来进行连接,11分动箱输出轴、5耦合装置齿轮则是利用耦合7齿轮来进行连接,利用离合器驱动行走系统。除此之外,该电动车辆的机械结构中,还包含了润滑系统、冷却系统、轴承以及密封等,以此来实现电动清扫车辆的众多系统功能。
3.3 驱动系统的控制策略
如图4所示,该图是搭载本动力系统的电动清扫车辆系统图。该系统可以将其分为控制系统子系统、能量供给子系统以及电力驱动子系统三个系统。其中的电力驱动子系统是该电动清扫车辆的动力系统中的核心部件,其主要由驱动电机、电子控制系统、机械传动装置、功率转换器等部件组成。而本动力系统的控制策略,则是以原有的控制策略为基础,清扫车的控制单元VCU要控制作业电机的行走和行走电机的转速,以此来使两者之间能够匹配,实现其耦合后,来驱动行走系统。该控制方法已成为当前新能源汽车控制策略中的一项十分成熟的技术。除此之外,VCU除了可以依据驾驶员的驾驶意图,将动力电池中的能量向电机驱动车辆的作业系统、行走系统进行转移,还可以在电动清扫制动时,实现再生制动[5]。
4 结语
综上所述,本文对电动清扫车动力系统进行深入分析,并介绍一种新型动力系统。该新型动力系统在以往的电动清扫车辆的动力系统下增加分动箱,在不作业时将动力取出,并通过耦合装置将行走电机和作业电机动力进行耦合,实现行走系统的共同驱动。在该电动清扫车辆的动力系统中,行走电机只需满足车辆的低车速工况,而在车辆进行高速行走时,可以利用作业电机补充动力差,相较于已有电动清扫车辆的动力系统,该新型动力系统更加易于实现,且总成本更低。
参考文献
[1] 马春生,王宽,纪清鑫.基于ADVISOR的纯电动清扫车动力系统的仿真研究[J].装备制造技术,2018(9):228-230.
[2] 白刚.某小型电动清扫车动力系统的设计与仿真分析研究[J].科技创新与应用,2016(36):21-22.
[3] 曹金龙.太阳能空调系统在纯电动清扫车上的应用探讨[J].汽车工业研究,2017(1):60-63.
[4] 李冰,刘娜,王登强.电动清扫车辆动力系统的研究[J].职大学报,2017(2):79-81+92.
[5] 严萍华.电动清扫车的总体设计以及动力系统的研究[D].南京:南京理工大学,2012.
收稿日期:2020-01-06
作者简介:石银宏(1999—),男,宁夏石嘴山人,本科在读,研究方向:车辆工程。
猜你喜欢
科学与财富(2021年36期)2021-05-10
孩子(2020年12期)2020-01-06
作文评点报·低幼版(2018年17期)2018-07-12
学会(2017年1期)2017-03-08
现代经济信息(2016年30期)2017-03-08
科技传播(2016年21期)2017-03-01
计算机辅助工程(2016年4期)2016-10-29
科技与创新(2015年19期)2015-10-14
财经理论与实践(2014年1期)2014-04-02
中学英语之友·高二版(2008年2期)2008-04-08