
自平衡双轴旋耕水田平整机设计
2020-09-08 01:40王理想奚小波仇维佑王明友张剑峰张瑞宏
扬州大学学报(自然科学版) 2020年2期
王理想, 奚小波,2*, 单 翔, 仇维佑, 王明友, 张剑峰,2, 张瑞宏,2
(1. 扬州大学机械工程学院, 江苏 扬州 225127; 2. 南京沃杨机械科技有限公司, 南京 211200;3. 农业农村部南京农业机械化研究所, 南京 210014)
目前,水田平整机械可分为传统平整机和激光平地机.传统平整机大多是通过在土壤上施加一定的压力,通过机具前进达到田面平整的目的.余水生[1]针对高茬水田耕整作业次数多,耕后的平整度难以达到水稻种植要求等问题,设计了一种秸秆还田耕整机,其中平地装置采用弹簧支撑杆连接平地板结构,从而实现秸秆还田后的田间平整度.但该机在平整操作过程中需要通过人工目测方式进行控制与调节,平整作业时间长,且耕整后的平整度难以达到水稻种植要求[2-3].激光平地机是利用激光控制技术在田间耕整时能对平地装置进行实时控制调节,有效提高耕整后田面平整度,但对水田本身的要求较高,在有秸秆或高低差过大的情况下效率低,且功能单一,机具成本高,不利于大规模推广使用[4-6],因此研制操作简单、价廉、高效的水田平整机成为一种趋势[7-9].本文拟采用双轴旋耕装置,配合自平衡和施肥装置, 完成水田深旋耕灭茬、施肥、起浆、平整等作业,提高作业平整度的同时减少作业时间, 从而提高水稻种植的质量和机具的作业效率[10-11].
1 平整机设计
1.1 整机结构
自平衡双轴旋耕水田平整机主要由机架、动力传动系统、液压系统、施肥机构、旋耕机构、平整机构、水平控制系统等组成,其总体结构如图1所示. 表1为主要性能参数.
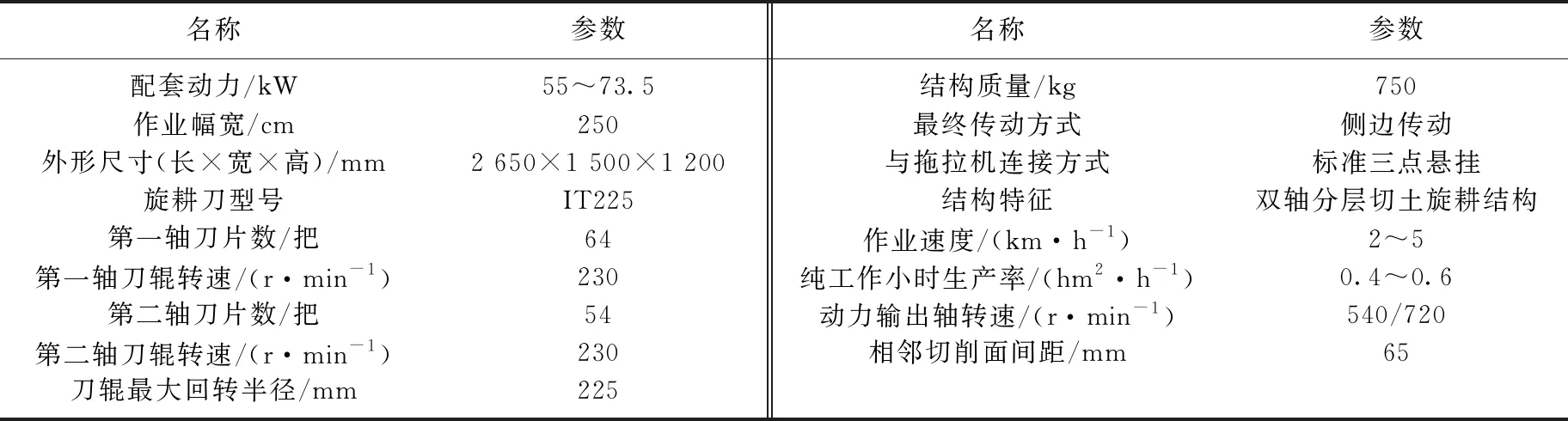
表1 主要性能参数
1.2 工作原理
自平衡双轴旋耕水田平整机由73.5 kW拖拉机驱动,由拖拉机后动力输出轴输出720 r·min-1的转速, 通过传动轴到达水田平整机的中间箱,再由中间箱通过2根传动轴分别向两边传动,带动两边齿轮传动,从而带动旋耕轴的旋转达到旋耕的目的;整机通过拖拉机的标准三点悬挂装置进行挂接升降;旋耕装置后面的挡板由水平自平衡装置控制,转角油缸控制挡板和平整板进行刮土、平土、运土的作业,自平衡装置是由传感器传递信号到主机,再由主机发送信号至电磁阀控制液压缸的伸缩量以达到自平衡,同时也可以根据实际情况手动调节平衡油缸达到特定的角度;平整板由压力弹簧和转角伸缩油缸控制,扩大平整幅宽.
2 主要部件设计
2.1 旋耕装置
图2为双轴旋耕装置.该机具采用的双轴旋耕能实现大耕深, 且具有秸秆还田彻底、水田起浆效果好等特点, 更有利于水稻的种植.
2.2 平整板
平整板位于机具后侧,工作过程中平整板的位置会随着地势的变化发生横向或纵向不同角度的切斜,使水田的平整度达到水稻种植的要求.由于传统水田平整机平整板存在幅宽窄、单液压缸控制、角度不可调、浮动较大的缺点,本文提出的机具改用液压缸伸缩式、宽幅和角度可调、浮动可控、变形压簧与液压缸共同控制的平整板结构,平整效率更高.图3为平整板结构示意图.
2.3 自平衡装置
2.3.1 液压系统
图4为液压系统示意图.采用独立供油,由拖拉机后输出轴与安装在中间箱上的齿轮泵通过链条连接传递动力; 液压泵采用CBN-G316型齿轮泵, 公称排量为16 mL·r-1, 额定压力为25 MPa, 可以满足整个液压系统的需求; 整个液压阀组采用插装式组成, 并采用可调式溢流阀.整个油路采用串联布置,第一路与平整板的伸缩油缸相连,由1组三位四通电磁阀控制; 第二路控制自平衡装置, 由1组三位四通电磁阀和1组液压锁止阀控制,电磁阀信号接入水平控制装置,并及时反馈有效的信号控制平整装置的稳定性; 第三路由1组三位四通和1组两位两通电磁阀共同组成,能有效控制平整板完成刮土、运土和平土的工作.
2.3.2 控制系统
以拖拉机12 V供电为基础, 电气控制调节盒作为控制器, 水平仪和陀螺仪为检测装置, 液压缸为执行装置.电气控制调节盒对传感器在机具工作过程中的不同工况反馈的数据进行及时处理[10-11], 当水田平整度大于5 cm时,电气控制调节盒通过电磁控制阀控制液压系统,使各个工作液压缸运动,达到及时调节平整板角度和浮动高度的效果,在特殊情况下可以转换到手动控制,以满足不同的平整要求,实现液压系统的自平衡控制,其工作流程如图5所示.图6为控制器总成, 由12 V电瓶供电通过控制盒上面的开关通向电源输入,再通过稳压器给整个电路供电,由传感器接入端传入的传感器数字信号通过模数转换器进行模数转换,再将模拟信号传递到处理器进行处理,处理完毕,发出模拟信号,再由模数转换器转换成数字信号后传入电磁继电器,通过给电磁液压阀供电控制液压油缸;信号比例调节端口和校准端口分别接入比例调节和校准开关,对反馈信号和初试信号进行调节.
3 田间试验
为了获得更精确的平整数据, 在扬州市江都区丁伙镇进行了田间作业试验, 具体的试验条件见表2.先将水田进行泡水处理, 然后用平整机进行初耕将麦茬和杂草等作物进行粉碎深埋, 初耕之后进行平整作业,此时机具的前进速度为5 km·h-1.图7为机具田间作业效果图.从图7可以看出, 作业后土壤表面秸秆和杂草的数量很少, 这是因为双轴旋耕装置使得土壤和秸秆混匀效果好, 有效降低了土壤秸秆比, 秸秆还田效果显著.

表2 试验条件


表3 地表平整度测量记录表
4 结论
1) 本文设计了一种自平衡双轴旋耕水田平整机,包括双轴旋耕装置、水田自平衡装置、平整板等装置,机具一次作业可完成水田深旋耕灭茬、施肥、起浆、平整4道工序.采用双轴旋耕装置实现了水耕条件下的大耕深作业, 使得土壤与秸秆混匀效果较好,作业后的土表秸秆较少, 秸秆还田效果显著.
2) 使用水田平整自平衡装置,实现了水田平整的高效率作业, 达到平整度在3 cm以内的作业要求, 平整后土壤相对高度的标准偏差仅为2.04 cm.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
鞍钢技术(2022年3期)2022-06-12
科技创新与应用(2022年14期)2022-06-02
现代装饰(2020年5期)2020-05-30
华声文萃(2020年2期)2020-03-16
文萃报·周五版(2019年41期)2019-09-10
文教资料(2018年32期)2018-12-24
山东工业技术(2018年4期)2018-02-07
中国高新技术企业(2017年11期)2017-07-08
科技创新与应用(2016年34期)2016-12-23
