超大口径弯月镜支撑点布局-刚度-校正力联合优化
2020-09-05 01:34:40习兴华张超杰胡海飞关英俊
光电工程 2020年8期
习兴华,张超杰,胡海飞,关英俊*
超大口径弯月镜支撑点布局-刚度-校正力联合优化
习兴华1,张超杰1,胡海飞2,3,关英俊1*
1长春工业大学机电工程学院,吉林 长春 130012;2中国科学院长春光学精密机械与物理研究所,吉林 长春 130033;3吉林大学机械与航空航天工程学院,吉林 长春 130025
在超大口径原位加工与检测中,目前多采用被动式Whiffletree液压支撑系统(原位支撑),而该类支撑单元的轴向刚度存在较大差异性,会显著影响轻薄型反射镜的面形精度。为解决这一问题,研究了主动型原位支撑的支点布局、单元刚度和主动校正力的联合优化方法。首先,针对支撑单元刚度差异,提出了支撑刚度、支点位置的分级布局优化方法,获得了支撑系统的初始优化解;其次,结合模式定标法和最小二乘法,进行了支撑点主动力校正,以获得支撑面形的最终优化解;最后,结合具体案例的数字仿真试验,验证了方法的有效性。结果表明:对于4 m弯月型轻薄反射镜,仅被动支撑下,分级布局优化后,60点方案面形精度RMS值由150.6 nm减少到32.9 nm,78点方案面形精度RMS值由45.2 nm减少到22.6 nm,优化效果显著;进一步经主动校正后,60点方案和78点方案面形精度RMS值分别为14.6 nm和6.9 nm,均满足面形精度RMS值小于/40(=632.8 nm)的指标要求;最终选取60点轴向支撑方案。通过对支点布局、支撑刚度和校正力进行联合优化,可以大幅增加原位支撑系统的适用性、灵活性,降低实施难度。
布局优化;主动光学;液压Whiffletree;刚度差异;原位支撑
1 引 言
随着人们对空间望远镜的灵敏度、分辨率、视场角和辐照亮度等方面的要求越来越高,导致空间望远镜仪器越做越大,许多都已经达到了2 m以上的超大口径,大幅度增加了反射镜加工支撑难度。对于处于地面环境下的空间反射镜而言,除去温度等其他因素的影响,自重变形对反射镜的面形精度影响较大,而且口径越大、精度越高的反射镜,其支撑难度就越大。自重变形主要受支撑点数量、支撑点位置和支撑单元刚度等因素影响[1]。研究超大口径反射镜的原位重力卸载技术,对提高其加工与检测精度和效率具有重大促进作用。
在支撑方面,长春理工大学设计了一种颈口侧壁开槽的柔性支撑[2]。在大口径反射镜支撑位置优化方面,中国科学院长春光学精密机械与物理研究所(简称长春光机所)确定了TMT三镜、某2 m口径反射镜的被动支撑方案并优化了支撑点位置,面形精度得到改善[3-4]。但是对于仅采用被动支撑的大口径反射镜而言,需要较多的支撑数量来保证其面形精度,导致被动支撑的实施难度增加。
为减少被动支撑数量并提高支撑面形精度,人们不断将主动光学技术应用于反射镜支撑系统中。欧洲天文台于1989年成功将主动校正技术应用于口径为3.58 m的NTT望远镜主镜,其后还有8 m的VLT、美国NASA的3.67 m AEOS、4.3 m SOAR[5]。
在国内,南京天文仪器厂设计了500 mm口径的薄镜面主动支撑系统。其后长春光机所对620 mm口径薄镜进行主动校正技术研究[6],并应用于1.23 m SiC反射镜、4 m SiC反射镜[7-8]。中国科学院光电技术研究所以1.2 m薄镜进行主动校正技术研究,搭建了主动光学试验平台并进行了试验验证[5]。
然而,目前有研究发现,群组支撑单元的刚度存在较大差异性,且对反射镜支撑面形精度具有较大影响,已经成为原位加工检测中的一个隐患[9]。因此,本文研究主动型原位支撑的支点布局、单元刚度和主动校正力的联合优化方法,并结合4 m弯月薄镜的原位支撑系统设计方案验证该方法的有效性。
对于4 m弯月薄镜而言,由于其口径过大,通过传统经验公式得到的支撑点数量过多,提高了支撑单元的刚度差异对系统影响的复杂程度,也增加了主动校正难度。本文通过有限元分析,确定了初步支撑方案;然后,通过分级优化方法,得到支撑单元的最佳刚度组合方案以及支撑单元最佳点位;最后,进行主动校正,得到理想重力卸载面形精度。
2 布局优化模型
根据静力支撑原理,支撑力应满足以下关系:
其中:为支撑点的支撑力,k为支撑单元的刚度,dz为支撑单元轴向压缩量。
在被动式静压支撑系统中,受相同支路内支撑单元输出力相等的特征限制,由式(1)可知,若每个液压支撑单元刚度k不同,会导致均力下各个支撑单元的轴向高度不同,这将影响反射镜支撑高度稳定性,从而影响镜面面形精度。为提高系统的支撑精度,如能对支撑单元刚度进行合理分配,并对支撑点位置进行布局优化,其性能提升将非常显著。
2.1 布局-刚度优化模型
对于个支撑单元的变刚度原位支撑系统,其布局优化方法模型可描述为

式中:k为支撑单元的刚度值,P(x,y)为支撑单元中心位置(支撑点)在直角坐标系平面的投影位置,为刚度数据库,Dz为去除刚体位移后,光轴方向第个节点变形量。面形精度评价指标RMS值和PV值可分别表示为

2.2 自动化流程
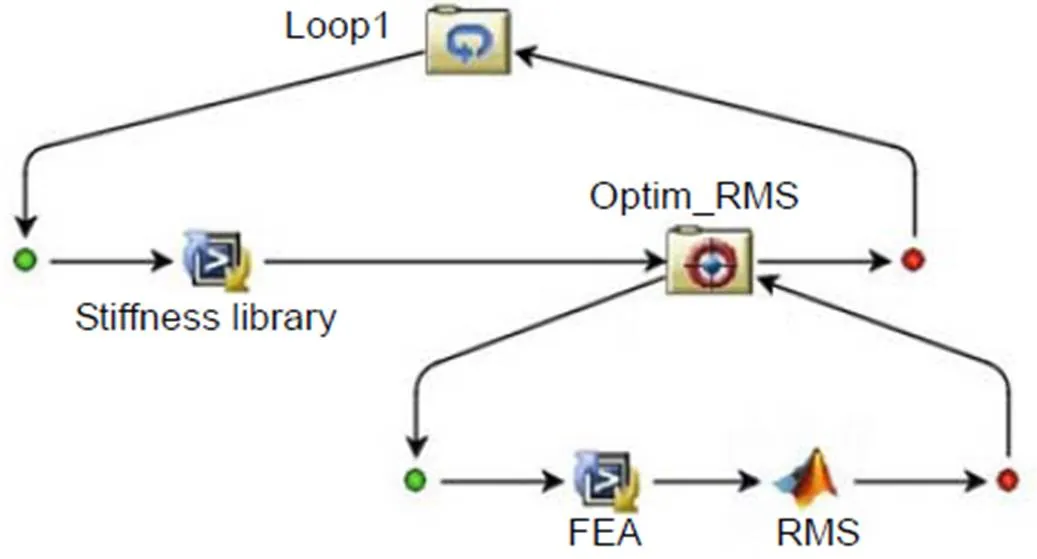
支撑刚度和支撑位置相互耦合,共同影响反射镜支撑面形精度,为了降低问题的复杂性,通过分级迭代的思想,对二者进行解耦后对支撑位置布局优化。用Isight软件建立了支撑刚度-位置耦合系统的分级布局优化分析流程,如图1所示。
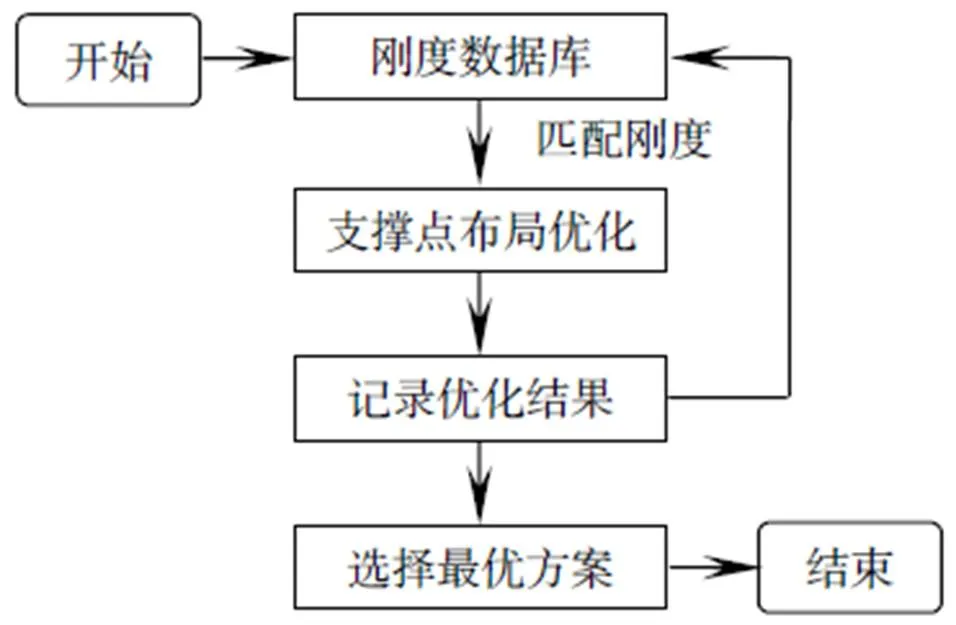
图1 支撑系统优化流程图
首先提取一种刚度组合方案映射到有限元模型中,采用遗传算法和序列二次规划法作为优化算法以面形精度RMS值为目标进行布局优化,得到该刚度组合方案下各支撑点最优位置,并记录刚度方案、支撑位置信息、RMS和PV值。然后再提取其他刚度组合方案进行支撑点位置寻优,通过对比各刚度组合方案布局优化结果的面形精度RMS值,输出最优刚度方案与支撑位置信息及对应的RMS值和PV值。
3 主动校正原理
主动光学的一项关键技术为波前拟合技术。波前拟合技术主要是拟合实际工况下的镜面变形,主要包括两种拟合方式:Zernike多项式拟合和自由谐振模式拟合。
Zernike多项式拟合与自由谐振模式拟合相比,前者侧重光学像差的表达,每一项都有与之匹配的光学像差,但是由于Zernike多项式在边缘存在弯矩作用,反射镜若产生Zernike多项式的模式变形需要更大的校正力[10];后者侧重反射镜机械结构特性,由于低频自由谐振模式能量较小[11],所以产生该模式变形所需的力较小,且各项自由谐振模式之间相互正交,但是模态振型函数受镜子结构几何参数限制,不同的镜子模态振型表达形式并不统一。
对于弯月薄镜,如果校正力过大,会造成镜子的破坏,为保证施加校正力后镜子的安全,本文采用自由谐振模式进行波前拟合。
自由谐振模式下波前拟合表达式为

取个镜面节点,通过有限元软件进行自由模态分析,取前项自由模态下这些节点沿光轴方向的向量值组成模态振型矩阵:
通过有限元分析,求取实际工况下镜面节点变形值,则自由谐振模式波前拟合的矩阵表达形式为
采用最小二乘法对拟合系数进行求解:
主动光学的另一项关键技术为校正力求解技术。波前拟合方式不同,则校正力求解方式不同。自由谐振模式波前拟合的校正力计算方法为模式定标法。
模式定标流程可归纳总结[12]为


4 案例应用
轻薄型弯月镜只需要较小的校正力,即可实现较好的主动光学面形校正效果,因此在光学工程中具有较大的应用潜力,以下通过对4 m口径SiC弯月薄镜的方案预研来验证上述布局-刚度-校正力联合优化方法的有效性。该4 m弯月模型曲率半径为6 m,中心厚度为50 mm,中心孔直径为500 mm。
4.1 支撑点数
为了满足4 m弯月薄镜的支撑面形精度要求,同时保证镜子不会由于应力过大造成结构破坏,采用Whiffletree液压被动支撑和力促动器主动支撑的组合支撑方案。由支撑变形理论可知,每个支撑圈上支撑点数量影响轴向支撑点之间的变形,支撑圈半径和支撑圈上的载荷分布影响径向变形。为了保证镜子在自重下的面形精度,同时尽量降低支撑系统的控制难度,需要合理地设计支撑圈数和支撑点数目。
Nelson[13]对圆形薄板各支撑圈数和各圈支撑点分配以及支撑点位置进行了详细的理论分析,支撑点分布和面形精度RMS值的关系为

因此,提出4圈60点、66点被动支撑和5圈78点、84点被动支撑方案,以各方案被动支撑下的面形精度RMS值作为评价标准,确定初步支撑点布局方案。为了便于对比,各个方案支撑单元刚度设置为文献[14]中平均值1944 N/mm。通过有限元分析,得出各方案在自重变形下的面形精度RMS值如表1所示。

表1 各支撑方案自重变形下面形精度
由表1可知,4圈60点支撑方案面形精度RMS值与66点方案的RMS值较为接近;5圈78点轴向支撑方案面形精度RMS值与84点方案的RMS值接近。所以选择均为三角形排布的4圈60点和5圈78点轴向支撑方案作为对比。
按照图2所示两种支撑方案的点位分布,以120°将液压支撑单元分为3个组,分别与其对应的虚拟硬点相连,在虚拟硬点处约束U、R和R三个自由度,镜子边缘设置3个虚拟硬点约束U、U和R三个自由度[15]。液压支撑单元用弹簧单元模拟并赋予相应的刚度值,建立有限元模型。并对两种支撑方案进行支撑刚度-位置耦合系统的分级布局优化。

图2 两种方案轴向支撑点布局示意图。(a) 60点轴向支撑系统;(b) 78点轴向支撑系统
4.2 支撑刚度-位置分级优化
实际中各个支撑单元刚度可能都不相同,为减少计算时间,假定通过分组互联的方式可以实现前期工作中得到的1918 N/mm,1890 N/mm,1935 N/mm,1978 N/mm和2002 N/mm等5种单元刚度值[8],并假定相同支撑半径下支撑单元刚度相同,对60点和78点支撑方案进行布局优化。两种方案优化前后的刚度分配、支撑半径和面形精度如表2和表3所示,其中1、2、3、4和5为各支撑圈刚度值,1、2、3、4和5为各支撑圈半径。
由表2和表3可知,60点初始支撑方案经过优化后,RMS值降低了78.2%,PV值降低了73.3%;78点初始支撑方案经过优化后,RMS值降低了50%,PV值降低了59.8%。结果表明,经过分级布局优化后,得到了合适的刚度分配方案和支撑位置,面形精度得到显著改善,证明了此分级优化方法有效。
4.3 模式法主动力校正
将60点轴向支撑方案的有限元模型进行自由模态分析,取去除刚体模态的前20阶自由模态振型进行定标力计算,其振型图如图3所示。
根据模式定标流程,首先提取前20阶模态振型中60个主动支撑点的轴向位移U,将U作为强制位移重新施加到对应的主动支撑点上,通过有限元静力学分析,求得主动支撑点的节点反力,将施加到主动支撑点上,再次进行有限元静力学分析,计算面形精度RMS值RMS。
根据式(9)计算出镜面面形RMS值归一化值=1000 nm时的模式定标力,其定标结果如表4所示,其中1max,2max,3max和4max分别为4个支撑圈上的最大校正力,定标误差为施加定标力后的镜面面形RMS值相较于归一化值的误差。
由于模式定标法的定标值受主动支撑点的位置、数量和支撑圈数限制,模态振型阶数越高,定标效果就会越差。如果增加主动支撑点数量和支撑圈数,定标后的镜面面形图就会接近模态振型图,定标效果将会提高。
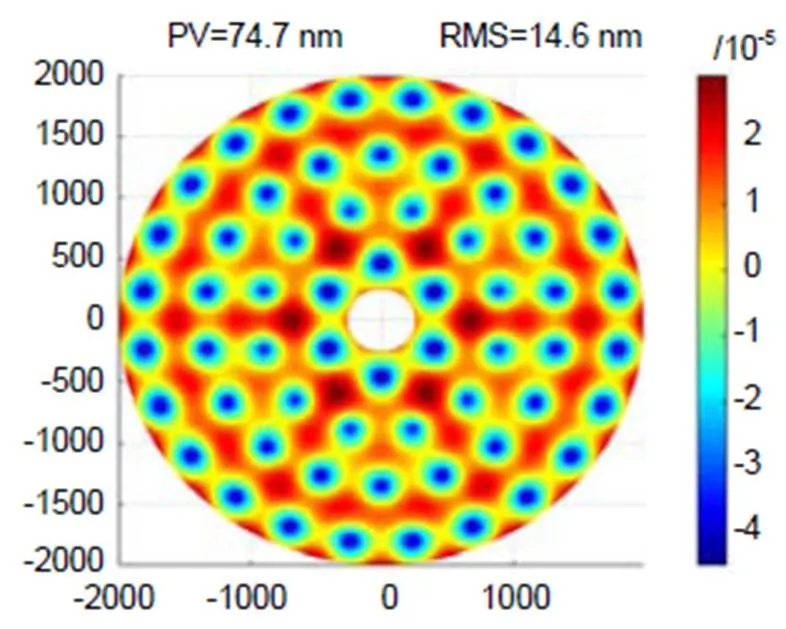
由表4可知利用该定标流程得到的前20阶自由谐振模式的校正能力较好,所以采用前20阶模态振型拟合自重下镜面变形,求得拟合系数后代入式(10)计算主动校正力,将校正力施加到支撑点上,对镜面面形进行主动校正。60点轴向支撑方案经初次校正后镜面面形RMS值减小到14.6 nm。经过相同过程,78点轴向支撑方案初次校正后镜面面形RMS值减小到6.0 nm。两种方案校正后的面形如图4所示。两种方案均满足面形精度RMS值小于/40(=632.8 nm)的指标要求,最终选择支撑数量更少的60点轴向液压支撑方案。

表2 60点轴向支撑系统布局优化结果

表3 78点轴向支撑系统布局优化结果
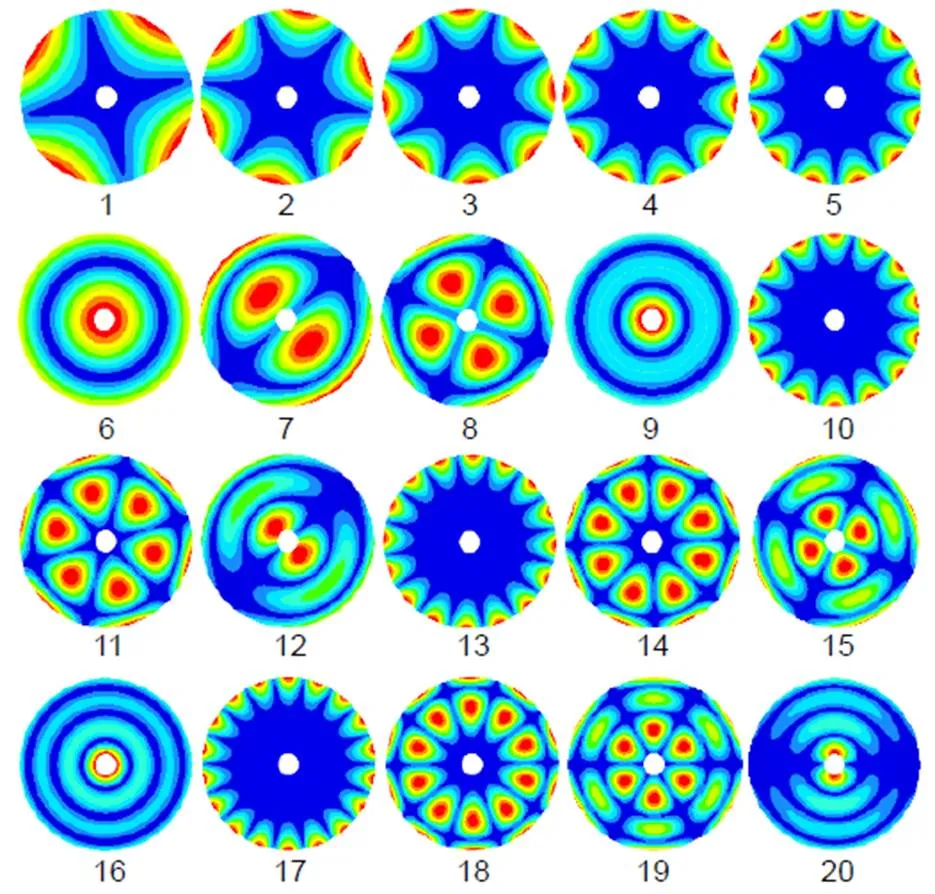
图3 反射镜前20阶模态振型
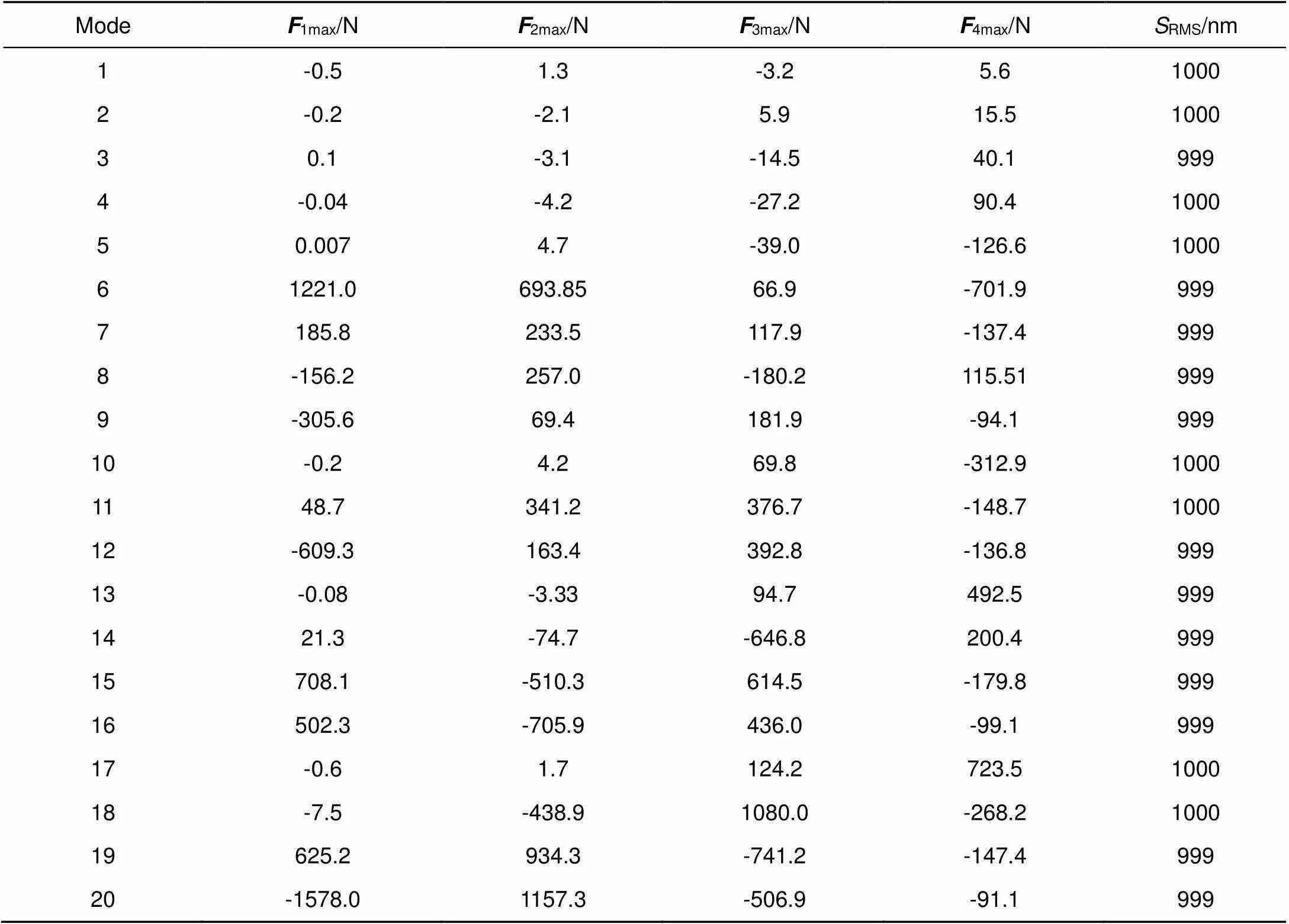
表4 60点支撑方案模式定标计算结果
5 结 论
本文为解决反射镜Whiffletree液压被动支撑单元间的刚度差异对反射镜重力卸载面形的影响,提出了对液压支撑单元刚度和支撑位置进行迭代寻优的分级优化方法,并通过模式法主动力校正技术对系统支撑的性能进行了进一步优化。通过4 m口径弯月薄镜案例应用表明,其60点和78点主动式轴向液压支撑方案分别得到了14.6 nm和6 nm RMS,优化效果显著,满足指标要求。本着支撑单元数量更少,降低控制难度的原则,优选60点轴向液压支撑方案作为最终方案。
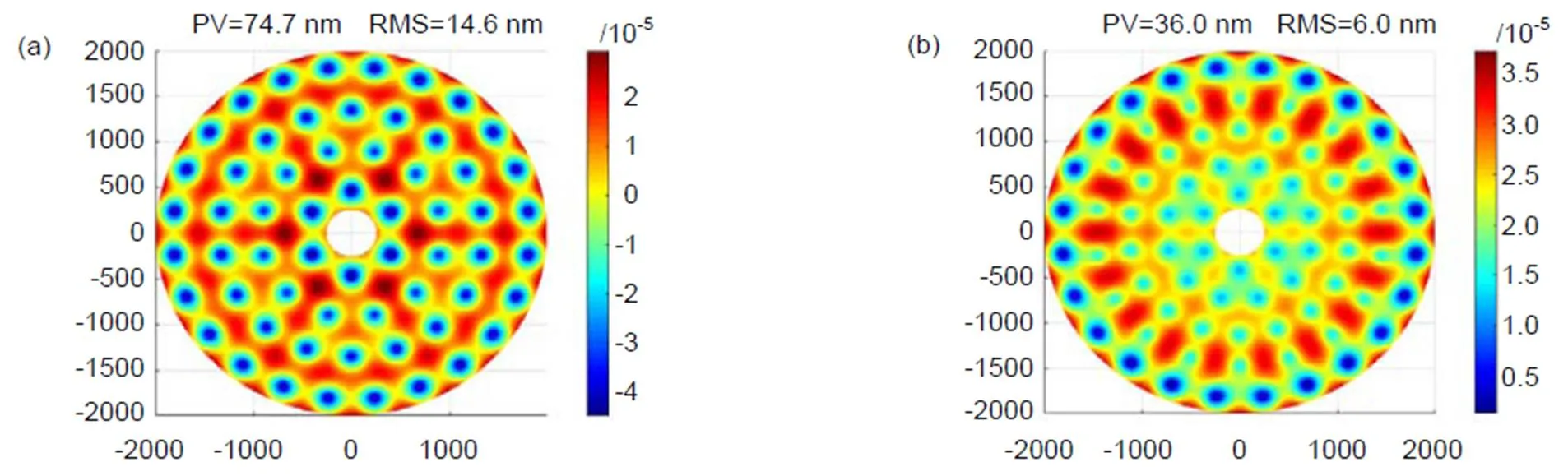
图4 主动校正后面形。(a) 60点方案校正后面形;(b) 78点方案校正后面形
通过对支点布局、支撑刚度和校正力进行联合优化,可大幅增加原位支撑系统的适用性、灵活性,降低实施难度,为其在未来弯月形超薄镜面原位制造中的应用奠定基础。
[1] Zhang L, Ye L, Zhang J P,. Gravity and support error separation of 1.2 m lightweight space mirror[J]., 2018, 47(7): 0722002.
张珑, 叶璐, 张金平, 等. 1.2m轻量化空间反射镜的重力支撑变形分离[J]. 光子学报, 2018, 47(7): 0722002.
[2] Liu M, Zhang L Z, Li X,. Design of flexure support of space compact reflector subassembly and dynamic analysis[J]., 2018, 45(5): 170686.
柳鸣, 张立中, 李响, 等. 空间轻小型反射镜柔性支撑设计与动力学分析[J]. 光电工程, 2018, 45(5): 170686.
[3] Hu H F, Luo X, Xin H W,. Layout optimization of equal-force supports for ultra-large optical fabrication[J]., 2014, 34(4): 0422003.
胡海飞, 罗霄, 辛宏伟, 等. 超大口径光学制造均力支撑布局优化[J]. 光学学报, 2014, 34(4): 0422003.
[4] Guo P, Zhang J X, Yang F,. Optimization of TMT M3 prototype’s support points[J]., 2015, 52(11): 112205.
郭鹏, 张景旭, 杨飞, 等. TMT三镜缩比系统支撑点位置优化[J]. 激光与光电子学进展, 2015, 52(11): 112205.
[5] Dai X L. Study on the active control technology of a thin primary mirror[D]. Beijing: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2018.
戴晓霖. 薄型主镜面形主动控制技术研究[D]. 北京: 中国科学院大学(中国科学院光电技术研究所), 2018.
[6] Li H Z, Zhang Z D, Wang J L,. Active surface-profile correction of 620 mm thin-mirror based on flotation support[J].
, 2013, 33(5): 0511001.
李宏壮, 张振铎, 王建立, 等. 基于浮动支撑的620 mm薄反射镜面形主动校正[J]. 光学学报, 2013, 33(5): 0511001.
[7] Zhu Y, Chen T, Wang J L,Active correction of 1.23 m SiC mirror using bending mode[J]., 2017, 25(10): 2551–2563.
朱熠, 陈涛, 王建立, 等. 1.23 m SiC主镜的本征模式主动光学校正[J]. 光学精密工程, 2017, 25(10): 2551–2563.
[8] Lan B, Wu X X, Li J F,. Influence of axial-force errors on the deformation of the 4 m lightweight mirror and its correction[J]., 2017, 56(3): 611–619.
[9] Hu H F, Luo X, Liu Z Y,. Designing a hydraulic support system for large monolithic mirror’s precise in-situ testing-polishing iteration[J]., 2019, 27(3): 3746–3760.
[10] Chen F L, Zhang J X, Wu X X,. Deformation of thin primary mirror fitted with its vibration mode[J]., 2011, 40(11): 2238–2243.
陈夫林, 张景旭, 吴小霞, 等. 模态振型拟合薄镜面变形分析[J]. 红外与激光工程, 2011, 40(11): 2238–2243.
[11] Noethe L. Use of minimum-energy modes for modal-active optics corrections of thin meniscus mirrors[J]., 1991, 38(6): 1043–1066.
[12] Fan L, Qiao B, Wang F G. Calibration of moment correction for thin mirror surface based on free harmonic vibration modal[J]., 2016, 39(3): 9–13.
范磊, 乔兵, 王富国. 薄镜面力矩校正在自由谐振模式下的定标计算[J]. 长春理工大学学报(自然科学版), 2016, 39(3): 9–13.
[13] Nelson J E, Lubliner J, Mast T S. Telescope mirror supports: plate deflections on point supports[J]., 1982, 332(12): 212–228.
[14] Hu H F, Zhao H W, Liu Z Y,. Hydrostatic support system for in-situ optical testing of a 4 m aperture SiC mirror[J]., 2017, 25(10): 2607–2613.
胡海飞, 赵宏伟, 刘振宇, 等. 4 m口径SiC反射镜原位检测用静压支撑系统[J]. 光学精密工程, 2017, 25(10): 2607–2613.
[15] Wang F G, Li H Z, Yang F. Ability of the thin mirror active optics to correct optical astigmatio[J]., 2010, 39(5): 871–875.
王富国, 李宏壮, 杨飞. 薄镜面主动光学对光学像差的校正能力分析[J]. 光子学报, 2010, 39(5): 871–875.
Layout-stiffness-correction force joint optimization of support system for ultra-large thin meniscus mirror
Xi Xinghua1, Zhang Chaojie1, Hu Haifei2,3, Guan Yingjun1*
1School of Mechanical and Electrical Engineering, Changchun University of Technology, Changchun, Jilin 130012, China;2Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, Jilin 130033, China;3School of Mechanical and Aerospace Engineering, Jilin University, Changchun, Jilin 130025, China
Optimization flow for support system
Overview:With the increasing requirements for the sensitivity, resolution and angle of view of space telescopes, the aperture of space mirror are getting bigger and bigger, which greatly increases the difficulty of mirror fabrication support. For the space mirror in the in-situ fabrication and testing, besides the influence of other factors such as temperature, the self-weight deformation has a great influence on mirror surface figure. And the larger the aperture and the higher the precision, the more difficult the support is. The self-weight deformation is mainly affected by factors such as the number of support points, the position of the support points and the stiffness of the support unit. Passive hydraulic support units (PHSUs) are frequently used in the in-situ fabrication and testing. However, some studies have found that the number of supporting units of large-aperture mirrors is too large, resulting in a large difference in the stiffness of each group of hydraulic support units, and has a great influence on mirror surface figure. It has become a hidden danger affecting the accuracy of in-situ fabrication and testing. In order to reduce the number of supporting units and increase the accuracy of the supporting surface, the joint optimization method of layout, stiffness and active correction is studied. Firstly, for the difference of PHUS' stiffness, a hierarchical layout optimization method for support stiffness and support position is proposed to obtain the initial optimization solution of the support system. Then, the mode calibration method and the least square method is used for active correction of support system to obtain the final optimized solution of the mirror surface figure. Finally, the effectiveness of the method is verified by a numerical simulation experiment with specific cases. The results show that, for 4 m thin meniscus mirror, after layout optimization, with the hydraulic passive support system, the root mean square (RMS) of the mirror surface errors of 60 point axial support system is reduced from 150.6 nm to 32.9 nm, and the RMS value of the mirror surface errors of 78 point axial support system is reduced from 45.2 nm to 22.6 nm. The optimization effect is remarkable. After active correction, the RMS value of the mirror surface errors of 60 point axial support system is 14.6 nm, and it is 6.9 nm for 78 point axial support system. The requirement of the RMS value of the mirror surface error is less than/40 (=632.8 nm). The support systems meet the requirement. Finally, the 60 point axial support system was selected. Through the joint optimization of layout, stiffness and active correction for supporting points, it can greatly increase the applicability, flexibility and reduce the difficulty of implementation for the in-situ support system.
Citation: Xi X H, Zhang C J, Hu H F,Layout-stiffness-correction force joint optimization of support system for ultra-large thin meniscus mirror[J]., 2020, 47(8): 190551
Layout-stiffness-correction force joint optimization of support system for ultra-large thin meniscus mirror
Xi Xinghua1, Zhang Chaojie1, Hu Haifei2,3, Guan Yingjun1*
1School of Mechanical and Electrical Engineering, Changchun University of Technology, Changchun, Jilin 130012, China;2Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun, Jilin 130033, China;3School of Mechanical and Aerospace Engineering, Jilin University, Changchun, Jilin 130025, China
Passive hydraulic support units (PHSUs) are frequently used in the in-situ fabrication and testing (in-situ support). However, the difference in PHSUs’ stiffness will affect the mirror surface figure, especially for those thin meniscus mirrors. In order to solve this problem, the joint optimization method of layout, stiffness and active correction is studied. Firstly, for the difference of PHUS' stiffness, a hierarchical layout optimization method for support stiffness and support position is proposed to obtain the initial optimization solution of the support system. Then, the mode calibration method and the least square method is used for active correction of support system to obtain the final optimized solution of the mirror surface figure. Finally, the effectiveness of the method is verified by a numerical simulation experiment with specific cases. The results show that, for 4 m thin meniscus mirror, after layout optimization, with the hydraulic passive support system, the root mean square (RMS) of the mirror surface errors of 60 point axial support system is reduced from 150.6 nm to 32.9 nm, and the RMS value of the mirror surface errors of 78 point axial support system is reduced from 45.2 nm to 22.6 nm. The optimization effect is remarkable. After active correction, the RMS value of the mirror surface errors of 60point axial support system is 14.6 nm, and it is 6.9 nm for 78 point axial support system. The requirement of the RMS value of the mirror surface error is less than/40 (=632.8 nm). The support systems meet the requirement. Finally, the 60 point axial support system was selected. Through the joint optimization of layout, stiffness and active correction for supporting points, it can greatly increase the applicability, flexibility and reduce the difficulty of implementation for the in-situ support system.
layout optimization; active optics; hydraulic Whiffletree; stiffness difference; in-situ support
TH751;TH74
A
10.12086/oee.2020.190551
: Xi X H, Zhang C J, Hu H F,. Layout-stiffness-correction force joint optimization of support system for ultra-large thin meniscus mirror[J]., 2020,47(8): 190551
习兴华,张超杰,胡海飞,等. 超大口径弯月镜支撑点布局-刚度-校正力联合优化[J]. 光电工程,2020,47(8): 190551
Supported by National Natural Science Foundation of China (11873007) and Central Guiding Local Science and Technology Development Fund (202002035JC)
* E-mail: gyj5460@sohu.com
2019-09-19;
2020-01-09
国家自然科学基金资助项目(11873007);中央引导地方科技发展基金(202002035JC)
习兴华(1994-),男,硕士研究生,主要从事空间光学遥感器结构优化设计方面的研究。E-mail:1973038493@qq.com
关英俊(1978-),男,博士,教授,博士生导师,主要从事空间光学遥感器结构优化设计方面的研究。E-mail:gyj5460@sohu.com
猜你喜欢
大学数学(2022年6期)2023-01-14 07:16:34
新能源科技(2022年9期)2022-11-20 19:28:56
航天返回与遥感(2022年3期)2022-07-07 05:13:36
电子技术应用(2021年1期)2021-01-22 09:45:06
环境技术(2020年1期)2020-03-06 11:41:02
航天返回与遥感(2018年2期)2018-05-17 09:37:57
中国公路(2017年15期)2017-10-16 01:31:53
百姓生活(2017年6期)2017-06-10 16:05:27
幸福家庭(2016年10期)2016-11-25 08:19:40
光学精密工程(2016年6期)2016-11-07 09:07:15