
同轴大压缩比大相对孔径相机的光学系统设计
2020-09-05 12:26刘伟奇董得义
光学精密工程 2020年8期
吕 博,刘伟奇,董得义
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
1 引 言
随着空间装备载荷发射任务日渐增多,卫星平台对载荷的搭载要求及空间对地光学成像相机向着小型化、功能集成等方向发展,具有轻量化、紧凑体积的功能载荷将逐渐替代原有空间体积庞大,占用发射资源的旧有型号。近几十年来,以对地侦察光学成像相机为代表的空间应用载荷,整机质量随着反射镜轻量化技术成熟度的提高而逐渐降低,但光学相机的空间尺寸并没有大幅缩减,对于未来运载火箭芯径有限下“一箭多星”的低成本商用航天发展趋势而言,宝贵的平台空间利用率尚有提升空间。其中,对于高性价、加工装调技术成熟,具备批量化制造的同轴对地成像光学相机在近年来的发展中,其核心的成像光路结构并没有发生较大突破,以美国Ikonos-2、Geoeye-1、Geoeye-2、Worldview系列、法国Pleiades-HR等为代表的空间对地光学成像相机,在多波段共口径的工作模式下,次镜反射后的光路穿过主镜中心开孔,在主镜及主镜支撑背板后入射平面反射镜进行光路折转,再通过三镜的反射后分光成像或直接成像,这种穿主镜中心孔的相机主光路形式导致光学系统总长约为主镜口径的1.8~3.2倍[1-4]。在主镜米级口径、小相对孔径(1/20~1/12)下,通过焦距的增长实现对地高分辨率成像,但为追求高分辨成像及高对比度,以主镜口径及焦距的增加作为牺牲,势必将导致这种穿主镜中心孔同轴成像光路形式的空间相机尺寸显著增大[5-13]。
本文以某型光学系统需求参数开展分析设计,通过高斯光学镜间关系计算和三反射镜平场消像差理论,采用偏视场设置及一维反射镜倾斜进行光路折叠,设计了在主次镜间完成会聚成像的具有高压缩比的双波段大相对孔径同轴反射空间相机。该空间相机在充分利用主次镜间空间,像差优化后全视场采样的传递函数接近衍射极限,在有限的空间尺寸下尽可能压缩了整机尺寸。光学系统内各组件加工及装调均可在现有常规技术能力下实现,为小空间、轻量化趋势下卫星平台搭载紧凑型大相对孔径光学成像相机设计提供了借鉴。
2 光学系统参数
根据某共口径双波段空间对地光学成像相机的应用需求,光学系统的主要光学参数如表1所示。
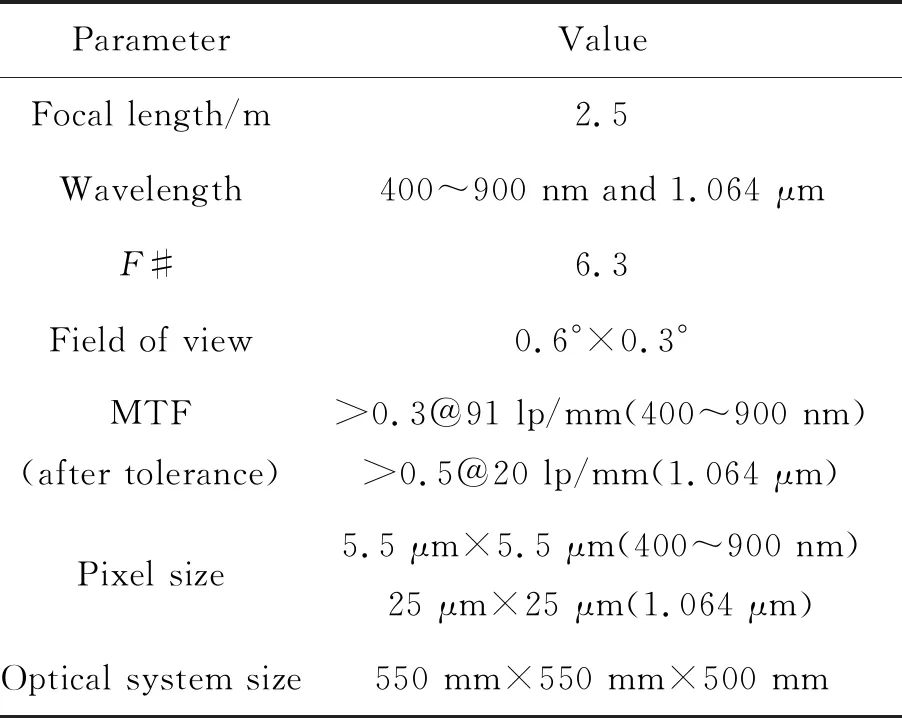
表1 光学系统设计参数
双波段相机采用两片独立探测器,分别接收可见-近红外及激光波段信息。由地面分辨率公式(1)可知,同等条件下,长焦距是空间对地相机实现高分辨率成像的基本因素。在焦距确定后,光学系统的理论空间截止频率fcutoff与光学系统像方F数及参考波长成反比,如式(2)所示。系统空间截止频率越大,光学有效入瞳直径D越大,则相机探测器像元奈奎斯特频率下的光学传递函数值越大,相机的成像清晰度、对比度越高,成像质量越好。
GSD=αH/f,
(1)
fcutoff=1/λF,
(2)
F=f/D.
(3)
但长焦距大口径光学系统的尺寸会很大,同时小于8的像方F数对于反射系统的小型化也带来挑战,传统采用一次或二次成像的同轴反射式基本光路结构虽然可实现小空间尺寸的成像,但一般同轴结构经过光路折叠后,光学长度也很难优化压缩到f/5,1.2D以下。

图1 传统同轴反射系统的主光路Fig.1 Core optical path of traditional coaxial reflection system
相机焦距较大,在使用同轴反射结构设计时,次镜出射的光线从主镜非成像区中心孔穿过,如图1所示。通过主镜支撑背板后进行光路折叠或会聚成像,这不利于沿光轴方向光学系统尺寸的控制,共口径多通道成像模式下长度进一步增加。同样,从主镜非成像区遮拦中心孔穿过的光线经过平面反射镜折叠到与光轴垂直方向进行会聚成像时,小角度视场偏置会导致三镜的入射光路和出射光路较长,以避免出射光路与用于光路折转的平面反射及分光器件干涉,大角度视场偏置会导致像差校正时三镜存在长出射光路及离轴量,进而导致整机在径向和轴向两个方向的尺寸增大,根据先期设计结果,沿光轴方向的系统长度约为660 mm,超过参数表1中轴向尺寸的限定,无法满足相机小型化的要求。
3 光学系统设计与性能分析
3.1 光学系统设计
考虑到焦平面组件的安装便捷、全视场下成像质量具有较高的一致性,光学系统应实现平场。由三级像差理论可推导同轴三反射镜系统像散系数SⅢ=0时的反射镜放大倍率表达式(4)。其中,α1,α2,β1,β2分别为次镜对主镜的遮拦比、三镜对次镜的遮拦比、次镜光学放大率及三镜光学放大率[14-17]。
(4)
(5)
式(4)与归一化下的反射镜顶点半径表达式(5)相结合,可得到在平场下的三个反射镜顶点半径关系表达式(6),其中,R1,R2,R3分别为主镜、次镜、三镜的顶点曲率半径。
(6)
根据设计经验,含有两次遮拦的同轴三反系统的β1β2取值在3~6,考虑到双波段分光路后探测器的安装调整,三镜的后工作距应适当充足,同时次镜及三镜实现小遮拦比,初始结构下倍率系数β1β2赋值为5,次镜遮拦比α1取0.3,二次成像时次镜光学放大倍率β1取-3.5,进而得到归一化同轴三反系统各反射镜初始顶点的曲率半径,根据相机焦距值进行软件初始设置下的半径放大[17-18]。针对本大相对孔径紧凑型空间相机尺寸约束及同轴系统的遮拦问题,本文将成像视场进行一维方向偏置处理,将0.6°(X向)×0.3°(Y向)成像角范围在Y向偏置,消除三镜对次镜的遮拦,提高能量利用率。从次镜反射出的光线在经过X向倾斜的平面镜P1反射后,改变了光路传输方向,向全局坐标系-Y方向投射到平面反射镜P2,平面反射镜P2在Y向倾斜,避免出射光线与P1镜物理干涉,光线经过Y向倾斜的平面反射镜P2和P3折叠后入射到三镜,相机主光路如图2所示。其中,P1在X方向上的倾角为45°,P2,P3镜Y向倾斜角度之和为45°,根据光线-反射镜坐标系变换原理,在序列模式下,此时的三镜法线平行于XOZ平面,三镜顶点法线垂直于系统光轴。根据视场角偏置设置和反射镜坐标系变换特性,经过三镜反射的光线在X方向会存在一定的出射角度,会聚光线可避开P3镜。最终,成像光线经Y向倾斜设置的平面反射镜P4入射到像面I。
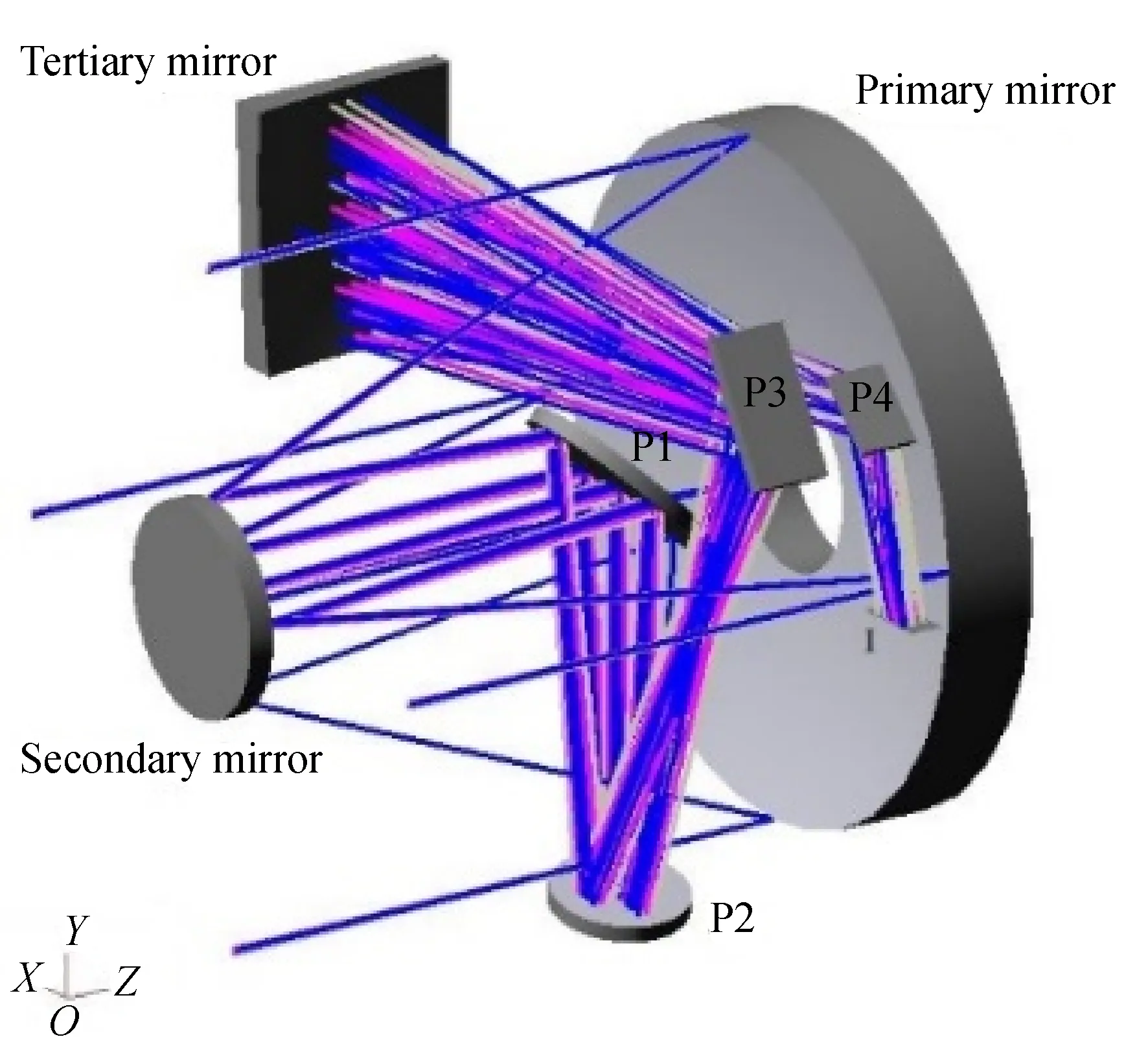
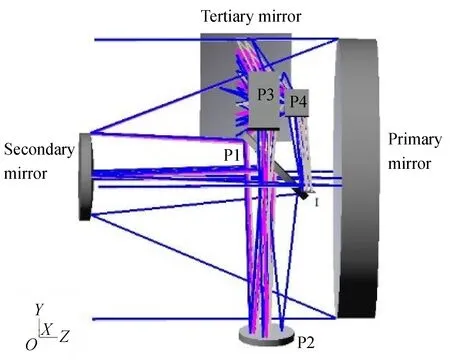
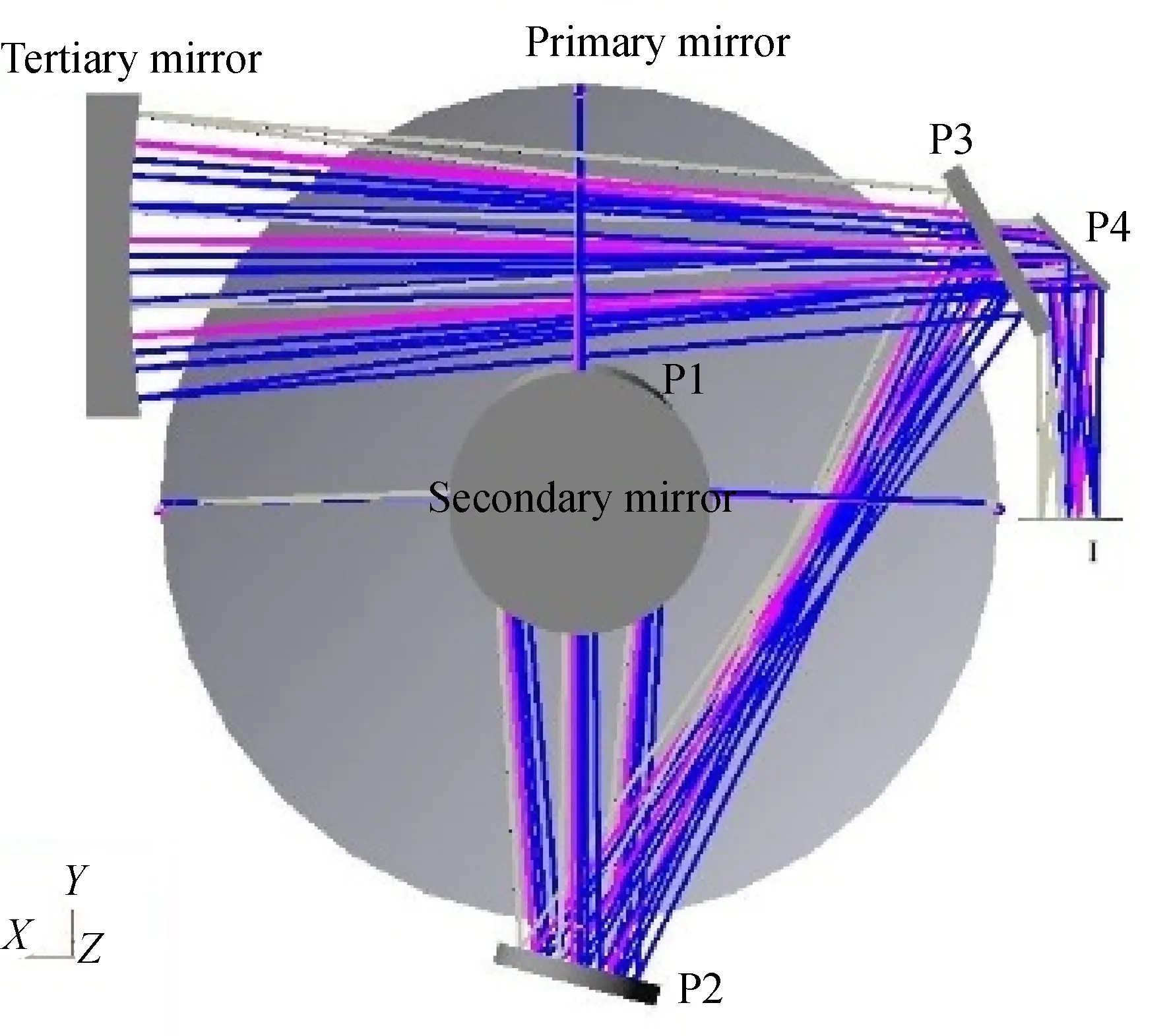
图2 不同视角下相机主光路Fig.2 Optical path of camera at different viewing angles
采用视场偏置和平面反射镜的一维方向倾斜设置,次镜出射主光路在主镜之前完成了折叠,主次镜间隔370 mm,系统长度得到了充分控制。为便于安装P1镜的支撑结构和主镜轻量化,主镜中心仍采用打孔处理;从P4镜出射的后截距光路应留出适当长度以进行分波段成像,保证会聚透镜和探测器的安装空间。采用Y向45°倾角设置的分色片完成工作谱段分光,可见-近红外波段光谱带较宽,为降低垂轴色差的校正难度,减少消像差透镜元件的使用,由分色片反射输出直接成像。控制三镜,P2,P3,P4镜内边缘与主镜筒的包络距离,保证主镜筒遮光罩的安装;系统中主镜和三镜为椭球面,次镜为双曲面,均未使用高次非球面系数,采用常规球面补偿镜方式即可辅助完成二次曲面的加工检测。在光学系统优化时,适当放开反射镜半径和二次曲面系数自由度,以初始半径为中心值,数值的偏移变化量不超过20%,镜间隔应保证各反射面接收的光路足迹无切趾无阻挡,控制主光线位置下的像面畸变,同时采用反馈式设计方式以降低面形制造敏感度和装配误差,以传递函数与采样出射波前rms作为设计评估标准。经过深度优化,主光路中各反射镜参数如表2所示。
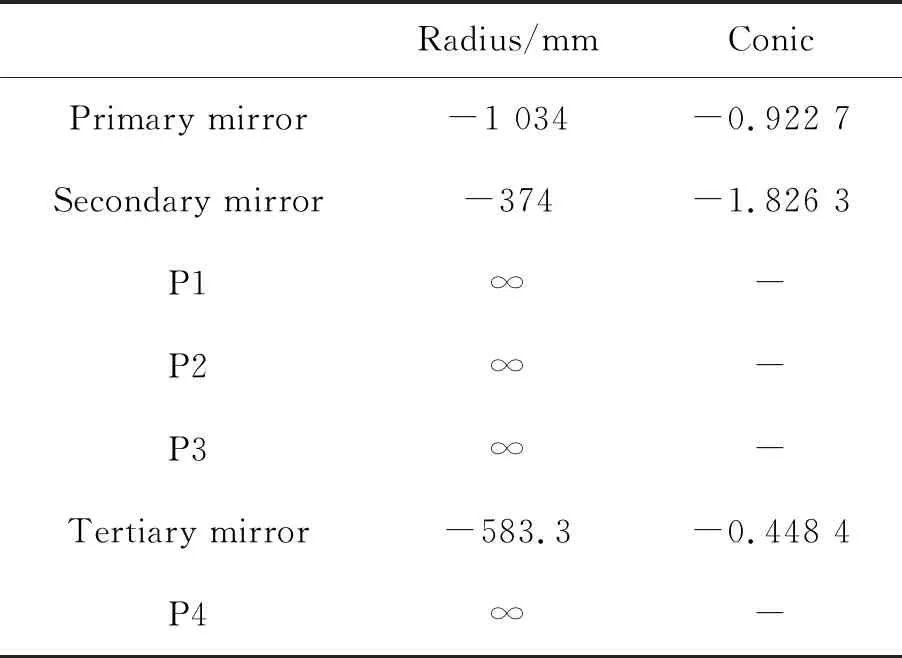
表2 光学系统主光路中的反射镜参数
系统中分色片与光轴的倾斜角会导致从分色片透射的激光光路近轴像差增大,其中影响较大的是三阶子午像散,因此采用与分色片反向倾角设置的透镜进行像差校正。考虑到激光波段较窄且接收探测器的奈奎斯特频率不高,使用单片球面透镜即可满足设计需求,激光通路中透镜如图3所示。
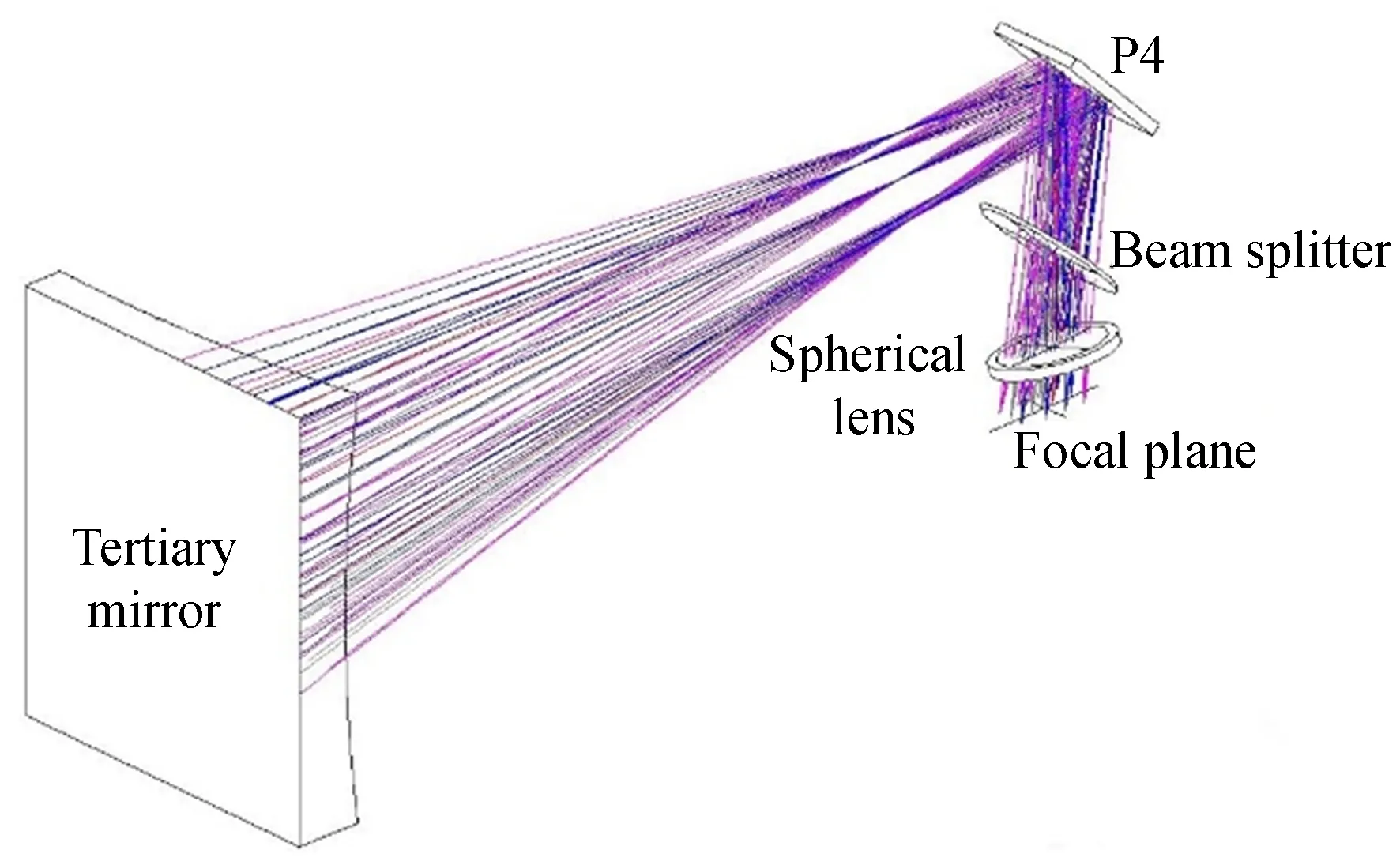
图3 激光接收通道光路Fig.3 Layout of laser receiving optical path
最终的双波段相机成像光路如图4所示。在成像视场光轴方向(Z方向),光学系统总长445 mm,约为焦距的1/5.6,主镜直径的1/1.1;垂直光轴方向的最大外包络尺寸为538 mm,约为焦距的1/4.6,极大限度地压缩了相机的光学尺寸。系统中采用同轴系统一维偏视场设置,避免了同轴系统三镜的二次遮拦,提高了系统成像的能量利用率;在一维方向倾斜设置的平面反射镜将光路在主次镜间折叠,在不产生光路遮挡下充分利用了镜间空间,有效地压缩了光学系统尺寸。
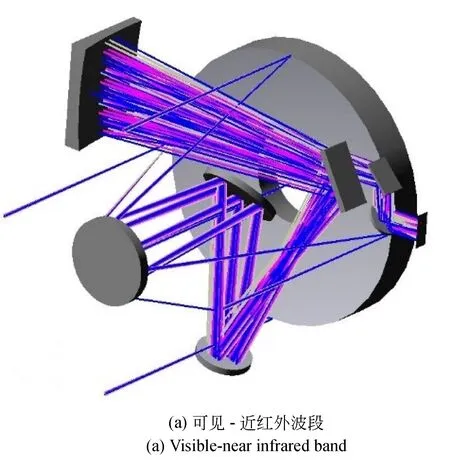
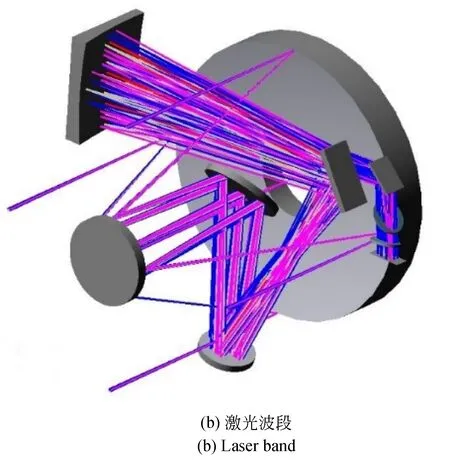
图4 光学系统分光路成像示意图Fig.4 Schematic diagram of optical system for split optical imaging
3.2 光学系统性能评价
根据本光学系统的视场角范围,对成像视场进行21×10离散视场点采样,以干涉仪的工作波长632.8 nm作为参考波长,视场内采样点的系统波前RMS如图5所示。从图中可以看出,系统内最大波像差RMS位于+Y方向视场区域,最大值小于0.006 3λ(λ=632.8 nm),波像差RMS平均值约为0.003λ,波像差RMS标准差小于最大值的1/6,视场内系统像差得到了较为充分的校正。
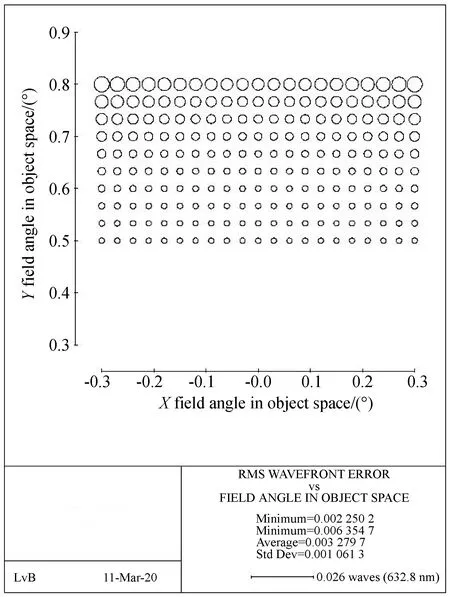
图5 光学系统的波像差RMSFig.5 RMS wavefront aberration of optical system
21×10视场采样下两波段衍射传递函数在奈奎斯特频率下的量值如图6所示。如图可见,在91 lp/mm的空间频率下可见-近红外波段传递函数的最小值为0.41,平均值为0.42,传递函数标准差小于0.001 1;激光接收波段在20 lp/mm的奈奎斯特空间频率下,传递函数最小值为0.64,标准差约为最大值的1/35,表明各自波段全视场下的传递函数十分接近,成像质量一致性较好。

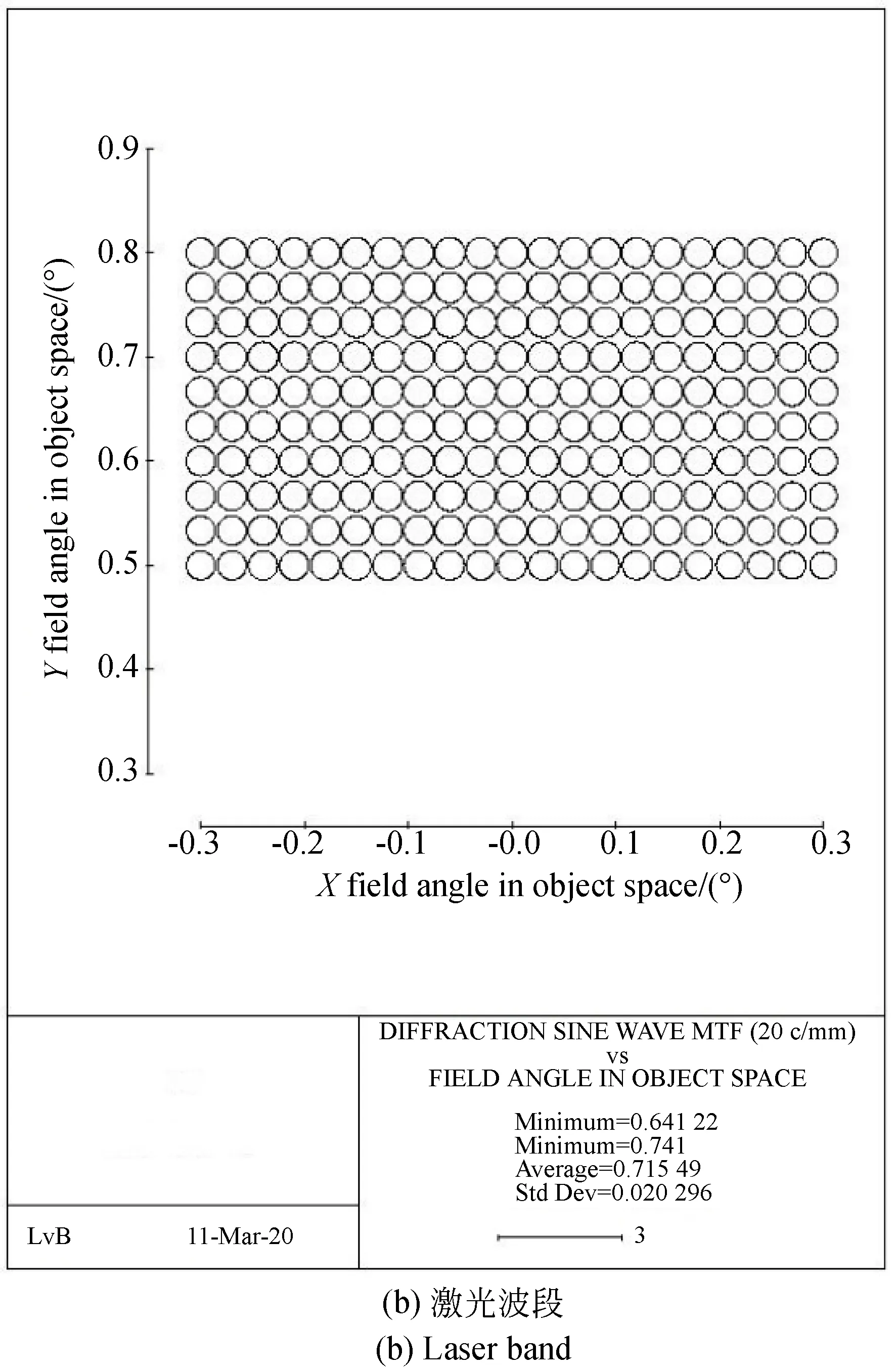
图6 全视场采样MTF量值统计

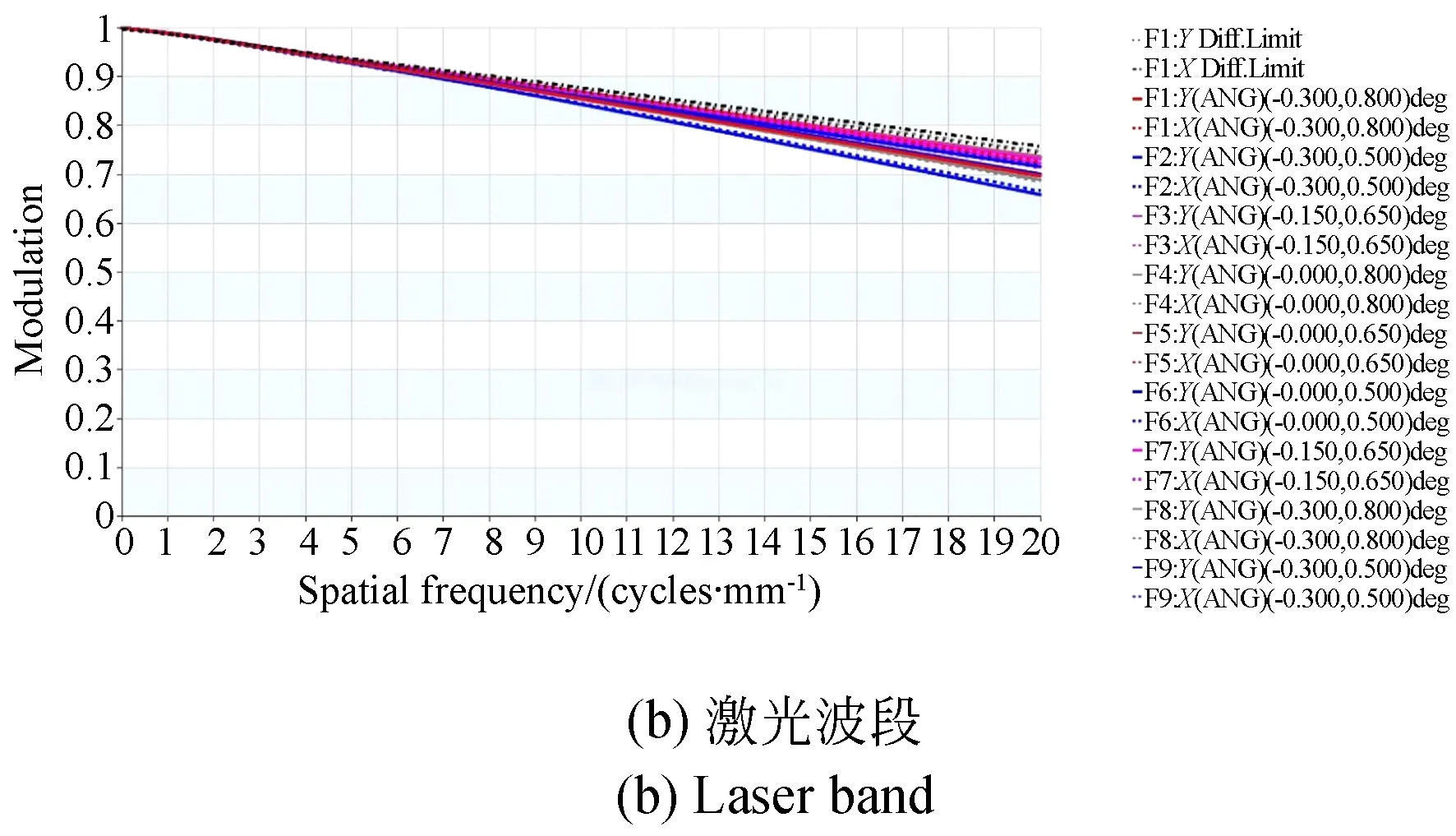
图7 典型视场的MTF曲线
从图7典型视场传递函数曲线可以看出,由于同轴系统中次镜存在中心遮拦,系统的衍射传递函数曲线在中高频处有客观的非线性下降。通过合理的光焦度分配与反射镜参数优化设计,可见-近红外波段各采样视场的传递函接近衍射极限,系统成像质量良好,大视场下的静态传递函数下降量较小,为后期加工装调误差造成的实际光学传递函数下降留有余量,满足空间相机光学系统的设计要求。
4 公差分析
在评估实际加工后相机光学系统的成像质量时,需要进行光学系统的公差分析,包括系统内单元组件的加工公差和装调位置公差。其中,光路中反射镜的加工公差包括非球面二次系数公差(DAK)、顶点曲率半径公差(DLR)、随机表面面形公差(RSE);反射镜装调位置公差包括各反射镜在X,Y,Z轴向的平移位置公差(DLX,DLY,DLZ),绕X,Y,Z轴的倾斜位置公差(DLA,DLB,DLC);激光接收波段谱段较窄,透镜中心厚度(DLT)及材料参数公差(DLN,DLV)可通过实测进行设计。光路中组件相互独立,在进行公差分配时,以两支路中探测器的位置公差作为成像质量的补偿单元,探测器的位置公差包括X,Y,Z轴向位移和倾斜共6个自由量,这也符合在相机实际研制阶段焦平面安装的具体操作方法[18]。
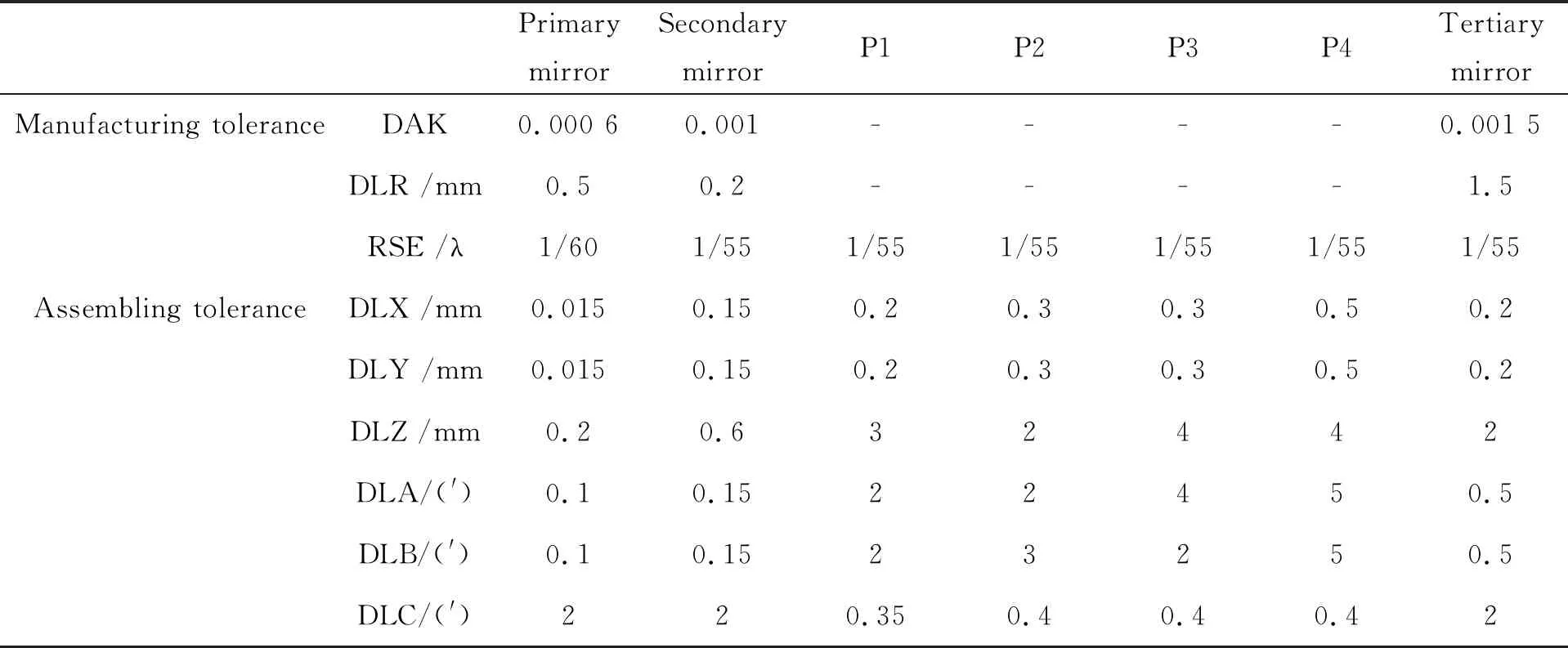
表3 反射镜公差分配
以系统自动给出的加工装调公差对本系统进行起始公差分配,以软件模拟结果作为评价标准再进行各公差的调整,对低敏感公差方开约束,较敏感公差调低量值,最终得到相机光学系统的公差分配结果,如表3所示。从表3可以看出,各反射镜面形及二次系数加工公差适当,以主镜作为安装基准,次镜二维倾斜公差适当,三镜较为宽松,平面反射镜对系统光焦度没有贡献,三维位置公差较为宽松。以分系统奈奎斯特频率下双波段传递函数的变化概率曲线作为系统公差的评价指标,以软件模拟统计传递函数的变化曲线,如图8所示。在正切及弧矢方向,可见波段在奈奎斯特频率91 lp/mm处,传递函数下降至0.3时,加工装调后的概率均高于90%,两向的传递函数下降量较为统一,满足传统空间对地相机装调后光学静态传递的设计指标要求。

相比可见光路,激光波段公差分析中主要加入透镜三维倾斜、位置公差,透镜半径、面型等元件的加工公差,敏感度分析结果较为宽松。从图9可以看出,激光波段奈奎斯特频率处传递函数在90%的加工装调概率下仍能优于0.65。
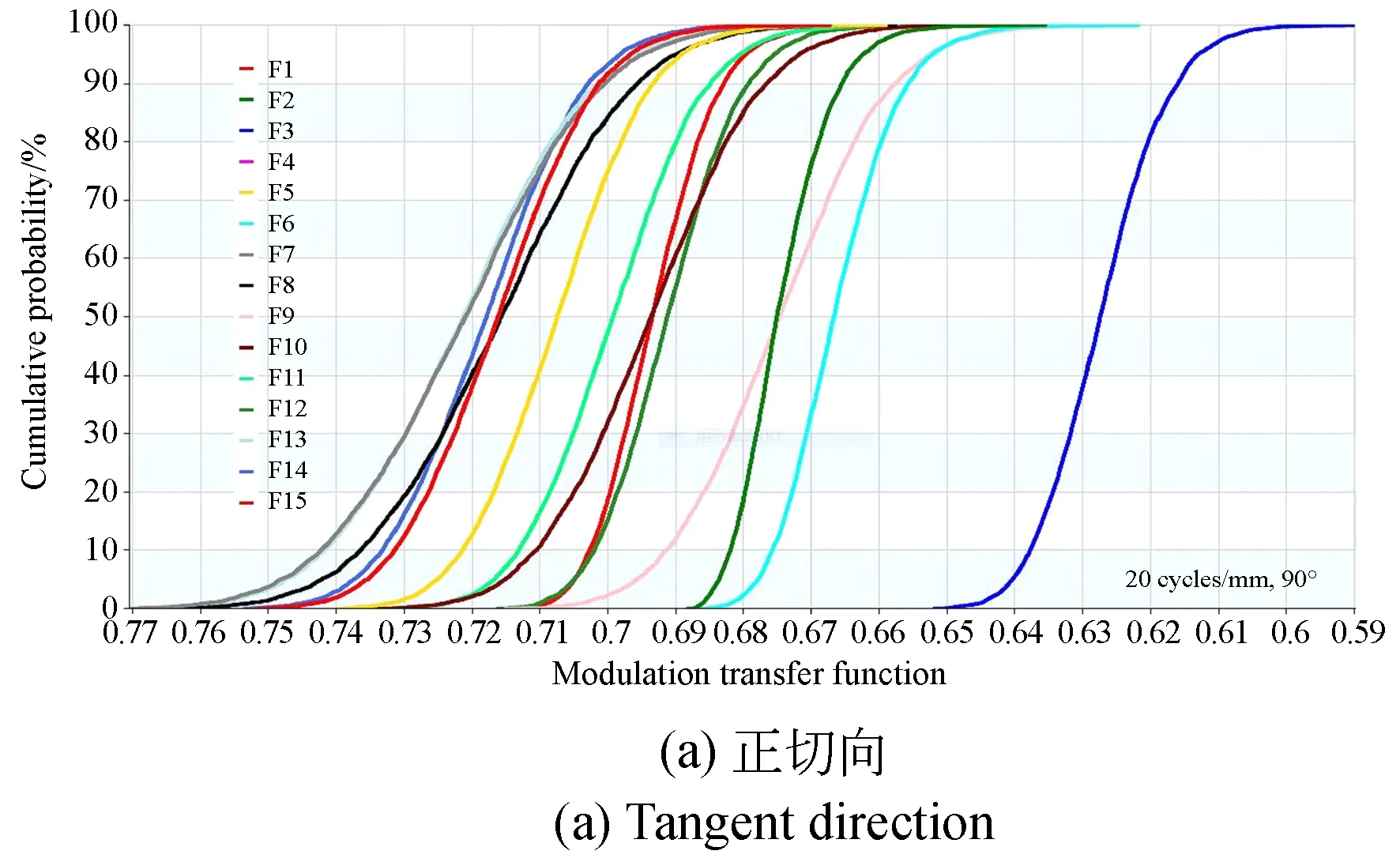
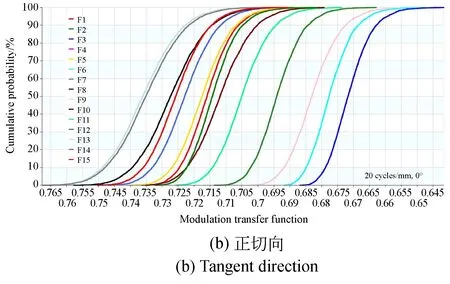
图9 激光波段MTF变化概率曲线Fig.9 MTF change probability curves in laser band
光学系统在后期装调时,首先通过转轴定心仪对主镜进行初始安装,借助主镜补偿镜、干涉仪在线检测装调后主镜的偏心角,通过干涉仪及平面镜闭环光路及计算机辅助装调技术对次镜进行在线姿态调整,通过调整次镜倾斜量及主次镜间隔,降低近轴区域球差和垂轴像差的影响,同时保证主次镜焦距进入公差域。固定装调后的两镜系统,作为后续反射镜的安装基准,对平面镜和三镜进行安装,使用平面反射镜和干涉仪对安装三镜后的系统进行波前检测,提供三镜位置调整量信息,分色片后分别对可见探测器进行多维装调和固定,激光波段借助结构位置配合调整,实现透镜安装及接收器位置优化。
5 结 论
本文通过对现有同轴反射系统进行偏视场设置即反射镜一维方向设置,研究并设计了一种双波段大相对孔径紧凑型高压缩比空间对地光学成像系统。相机光路中一路成像为无色差的全反射型结构,对工作在可见-近红外等宽波段通用性较好,可完成地面目标信息的二维彩色成像,另一光路为常规1.064 μm激光照射回波接收通道,对相机运动轨迹下激光足印采集,后期解算完成目标测高,双波段信息融合处理可实现观察视场内目标三维信息获取。经深度优化,本同轴系统主光路只采用二次曲面系数非球面反射镜和平面反射镜作为光焦度分配合和光路折叠元件,各反射镜不存在空间位置的离轴量,为组件的装调降低了难度。根据反射镜成像下的坐标变换特性,仅在一维方向对平面反射镜进行倾斜,保证光路序列入射的同时,在主次镜中间完成成像及接收光路的高效压缩,相机尺寸得到了控制。然后对光学系统进行了成像评估和后期加工装调公差分析。根据设计需求,光学系统在双谱段下成像质量良好,各视场下传递函数曲线接近衍射极限,具有较高的成像一致性。采用视场偏置设置和平面反射镜一维倾斜的坐标系变换,实现了成像光路在主镜前的有效折叠,光学系统长度压缩到了f/5.6以下,避免了传统同轴系统光路穿主镜后成像系统过长、体积大的问题。通过合理选择组件参数,深度优化后的光学系统具有较为宽松的公差结果。这种空间相机可满足对空间尺寸有较严要求的场合,具备高压缩比、大相对孔径、共口径多通道和高分辨率等特点,在推扫、摆扫成像模式等空间光学领域将得到广泛应用。
猜你喜欢
新能源科技(2022年9期)2022-11-20
光电工程(2020年9期)2020-09-29
环境技术(2020年1期)2020-03-06
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
中国光学(2017年4期)2017-08-01
光学精密工程(2016年11期)2016-12-19
光学精密工程(2016年6期)2016-11-07
中国光学(2015年1期)2015-06-06
中国高新技术企业·综合版(2013年1期)2013-02-04
