基于车联网的车辆与行人碰撞预警方法研究
2020-09-04 14:27:34吴宇通张洪昌
科技与创新 2020年17期
吴宇通,张洪昌,曾 娟
(武汉理工大学 汽车工程学院,湖北 武汉430070)
1 引言
目前,由于车辆行业的不断发展,车辆的人均保有量不断增加,由此导致交通事故的发生率也随之提升,因此,降低事故发生率成为了迫在眉睫的问题之一。俗称的“鬼探头”就是一种由于行人或非机动车从驾驶员视线盲区突然出现而驾驶员反应不及而导致的一种交通事故。数据显示,2019年全国的交通事故中,有26%是由于行人或非机动车从驾驶员视野盲区出现所导致的,因而急需要一种预防措施来判断发生碰撞的可能性,提醒驾驶员及行人从而减少甚至避免这样的事故发生。
本文设计了一种采用远程服务器、行人信息、行驶车辆信息以及道路信息之间进行交互的系统,计算并比较行人运动时间及车辆预算行驶时间能直观且准确地判断双方是否能够发生碰撞,从而对行人及驾驶员进行双向预警,使得行人与车辆碰撞的风险大大降低。
2 方法总体设计
本文所使用的车辆与行人碰撞预警的方法流程如图1所示,主要由车载信息获取单元、行人信息获取单元、道路信息获取单元以及远程服务器四个部分组成。首先通过所获取的条件计算出预测碰撞点与测量起始点的距离,通过从车载信息获取单元和道路信息获取单元得到的车辆行驶速的差距对差值的大小2 s一级进行合理分级,以提醒行人及驾驶员对不同等级警报采取不同紧急程度的措施,避免出现过激或反应不及时的情况,从而有效提高车辆在道路上的行驶安全以及行人安全,有效降低交通事故发生率。
在本文所使用的车辆与行人碰撞预警的结构中,各部分的功能及介绍包括:用于获取车辆、行人以及道路信息并进行交互的远程服务器;装载于行驶车辆上,用于获取车辆速度、位置以及行驶方向,上传至远程服务器,并从中获取行人及道路信息,具有预警功能的车载信息获取单元;将软件行驶装在行人手机上,用于获取行人速度、位置以及行进方向,上传至远程服务器,并从中获取行人及道路信息,具有预警功能的行人信息获取单元;装载于道路两侧,用于收集附近道路信息并上传至远程服务器的道路信息获取单元。结构流程如图1所示。

图1结构流程图
3 碰撞预警模型建立
本文所使用车辆与行人碰撞模型如图2所示,其中包含3个数学模型。

图2车辆与行人碰撞模型图
3.1 车辆运动时间运算模型
3.1.1 车辆首先经过限速牌的模型
当车辆检测起始点与限速牌距离小于与减速带之间的距离时,获取道路及车辆相关数据后计算到预测碰撞点的行驶时间,行驶时间分为非道路影响行驶时间以及道路影响行驶时间,其中非道路影响行驶时间计算方法为:

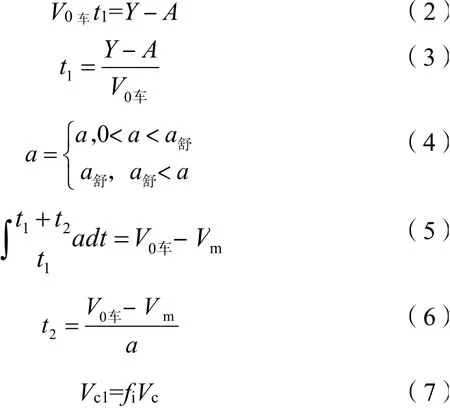
t1+t2即为非道路影响行驶时间。
所述道路影响行驶时间分为3种工况。
第一种,当车辆在进入减速带的减速区域尚未减速到限速牌的限定车速且在经过减速带前能够减速到限定车速时,计算方法为:

t3即为道路影响行驶时间。
则该种工况下车辆预算行驶时间为:
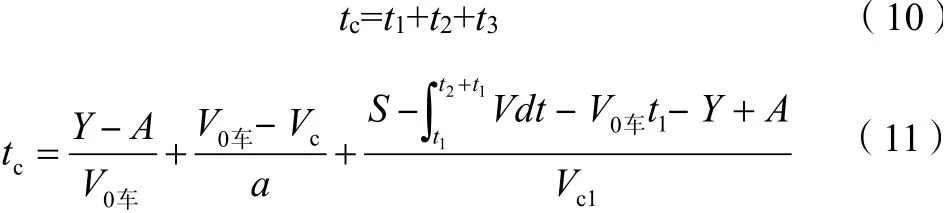
第二种,当车辆在进入减速带的减速区域尚未减速到限速牌的限定车速,且在经过减速带后还未减速到限速牌的限定车速时,计算方法为:
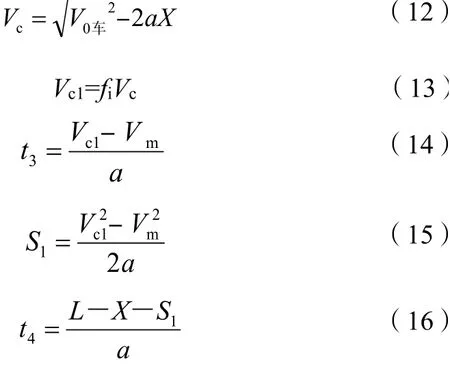
t3+t4即为道路影响行驶时间。
则该种工况下车辆预算行驶时间为:

第三种,当车辆在进入减速带的减速区域前已减速到限速牌的限定车速时,计算方法为:

t3+t4+t5即为道路影响行驶时间。
则该种工况下车辆预算行驶时间为:

式(1)~(24)中:t1为车辆开始制动前匀速行驶的时间;t2为车辆在限速牌前减速到限速牌限定速度的制动时间;t3为车辆减速到限速牌限定车速后匀速行驶到减速带减速区域前的时间;t4为车辆在减速带减速区域的制动时间;t5为车辆经过减速带后匀速行驶的时间;tc为车辆预算行驶时间;S为由于减速带导致的由驾驶员操作习惯决定的制动点与减速带之间的距离;S1为车辆经过减速带后减速到限速牌限制速度的制动距离;X为减速带与检测起始点距离;V为即时车速;fi为减速带减速系数;i取决于减速带类型;Vc1为车辆与减速带接触后速度;Vc为车辆与减速带接触前速度;L为车辆检测起始点与预测碰撞点的距离;fn为安全系数;V0车为车辆初速;a为制动时减速度;S安为安全距离;Y为限速牌与检测起始点距离;A为由于限速牌导致的制动点与限速牌之间的距离;Vm为限速牌限定速度。
3.1.2 车辆首先经过减速带的模型
当车辆检测起始点与限速牌距离大于与减速带之间的距离时,获取道路及车辆相关数据后计算预测到预测碰撞点的行驶时间,行驶时间分为非道路影响行驶时间以及道路影响行驶时间,其中非道路影响行驶时间计算方法为:

t1+t2即为非道路影响行驶时间。
所述道路影响行驶时间分为3种工况:
第一种,当车辆经过减速带后的车速小于限速牌限定车速时,计算方法为:

则该种工况下车辆预算行驶时间为:

第二种,当车辆经过减速带后的车速大于限速牌限定车速时,计算方法为:

则该种工况下车辆预算行驶时间为:

公式(25)~(36)中:t1为车辆行驶到减速带减速区域前匀速行驶的时间;Vc为车辆与减速带接触前速度;Vc1为车辆与减速带接触后速度;fi为减速带减速系数;i取决于减速带类型;S为由于减速带导致的由驾驶员操作习惯决定的制动点与减速带之间的距离;a为制动时减速度;V0车为车辆初速;t2为车辆在减速带减速区域中减速的制动时间;t3为车辆经过减速带后匀速行驶的时间;L为车辆检测起始点与预测碰撞点的距离;S2为车辆经过减速带后减速到限速牌限定车速的制动距离;t4为车辆经过减速带并减速到限速牌限定车速后匀速行驶至预测碰撞点的行驶时间;tc为车辆预算行驶时间。
3.2 行人运动时间运算模型
本文采用的行人运动运算模型,通过获取行人运动及道路信息预测行人到预测碰撞点的时间,计算方法为:
式(37)(38)中:t障为总障碍物阻挡时间;n为障碍物数量;tik为路面障碍物阻挡时间,i由障碍物类型决定(k=1,2,3,…);tp为行人预算运动时间;B为行人的检测起始点与预测碰撞点之间的距离;V0人为行人初速;α为行人速度与垂直车速方向的夹角。
3.3 碰撞预警分级模型
通过比较tp和tc进行预警并通过其具体差值对预警进行分级,如果tp-tc≤3 s或tp-tc≤5 s时,发出一级警报;如果3 s<tp-tc≤5 s或5 s<tp-tc≤7 s时,发出二级警报;如果5 s<tp-tc≤7 s或7 s<tp-tc≤9 s时,发出三级警报;如果7 s<tp-tc或9 s<tp-tc时,则判断不会碰撞。
4 结束语
在本文介绍的车辆与行人碰撞预警的系统中,可根据车辆的不同运动参数选择不同的计算方法,将计算出的车辆预算行驶时间最后与计算出的行人预算运动时间比较算出差值,依据碰撞预警分级模型将警报分级后提醒驾驶员及行人,驾驶员及行人可根据不同的分级采取不同的应对策略。本系统重点考虑了道路因素对驾驶员操作的影响以及行人运动的影响因素,进一步提升了预测的合理性、准确性与真实性,从而有效预防了行人与车辆的碰撞,最终最大可能地避免事故的发生。
猜你喜欢
物理教师(2022年3期)2022-04-18 06:15:06
意林(2021年5期)2021-04-18 12:21:17
扬子江(2019年1期)2019-03-08 02:52:34
测试技术学报(2018年4期)2018-07-10 03:39:32
中学生数理化·八年级物理人教版(2018年5期)2018-06-21 08:01:40
汽车维护与修理(2018年1期)2018-04-04 01:13:22
小天使·一年级语数英综合(2017年6期)2017-06-07 23:51:16
车辆与动力技术(2016年2期)2016-09-14 02:46:03
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33