
一种圆弧相切式单向减速带特性仿真与优化
2016-09-14 02:46:03胡文,杨林
车辆与动力技术 2016年2期
胡 文, 杨 林
(北京理工大学 机械与车辆学院,北京 100081)
一种圆弧相切式单向减速带特性仿真与优化
胡文, 杨林
(北京理工大学 机械与车辆学院,北京 100081)
针对汽车以较低限速通过传统圆弧减速带时,也会产生比较明显振动的缺点,提出了一种圆弧相切式单向减速带.建立4自由度汽车数学模型,在MATLAB/Simulink中进行平顺性仿真对比分析,结果表明:一定减速带轮廓参数条件下,汽车在低速通过圆弧相切式单向减速带时,车身垂向加速度峰值响应低于传统圆弧减速带;在高速通过圆弧相切式单向减速带时,车身垂向加速度峰值响应高于传统圆弧减速带.验证了所提出的减速带能够避免传统圆弧减速带的缺点,实现有效限速.并对圆弧相切式单向减速带轮廓进行了优化.
减速带;圆弧相切式;平顺性;垂向加速度峰值
减速带是安装在公路上使经过的车辆减速的一种交通设施.圆弧型减速带是目前应用非常广泛的道路减速带.减速带通常宽度为300~500 mm,高度为30~60 mm,长度以路宽为准.传统减速带的主要缺点是汽车以高速或低速通过时都会产生比较强烈的振动,不仅降低舒适性,而且影响控速效果,使道路减速带的设置失去意义[1].因此,如何进一步提高使用减速带的舒适程度,使之更具人性化是亟待研究解决的课题[2].
关于减速带平顺性,已经有一些关于减速带截面轮廓的研究.例如测量并对比不同类型的车辆通过不同截面尺寸的减速带时引起的地面振动[3];利用SIMPACK建立汽车和减速带模型,研究不同宽度、高度下的圆弧、梯形减速带对汽车轮胎的冲击载荷[4].这些基本都是针对传统减速带研究其平顺性,并未涉及到对减速带形状的进一步优化.而文献[5]中提到了一种抛圆相切式减速带,其特点是在传统圆弧减速带轮廓两端各增加一段抛物线,使其迎车面和去车面均与地面相切,并通过ADAMS/CAR仿真对比了圆弧、梯形、抛圆相切式3种减速带,认为汽车通过抛圆相切式减速带的冲击最小[5].但是,在汽车以高于限速的车速通过抛圆相切式减速带时,冲击的减小反而降低了减速带的限速效果.因此,文中提出了一种宽度与传统减速带相等的圆弧相切式单向减速带,并利用MATLAB/Simulink对其进行特性仿真和优化.
1 理想减速带特性
汽车行驶平顺性很大程度由车身垂向加速度决定,通过大量的实际经验和现场反映得出人体对3~12.5 Hz频率范围的垂直振动最为敏感,人体对振动加速度的极限容许值为3.5~4.5 m/s2[6].
理想道路减速带应具有的特性是:①随着车速的增加,行驶安全性降低到一定程度后能维持在一个稳定水平,甚至有所提高;②驾驶人的乘坐舒适性在车速低于限速时处于较高水平,在高于限速而低于所有超速车辆的85%车速时应随车速的增加而迅速恶化,在高于所有超速车辆的85%车速时能够维持在一个稳定的低水平状态[7].车辆通过理想道路减速带时,其行驶安全性和乘坐舒适性与车速的关系如图1所示.
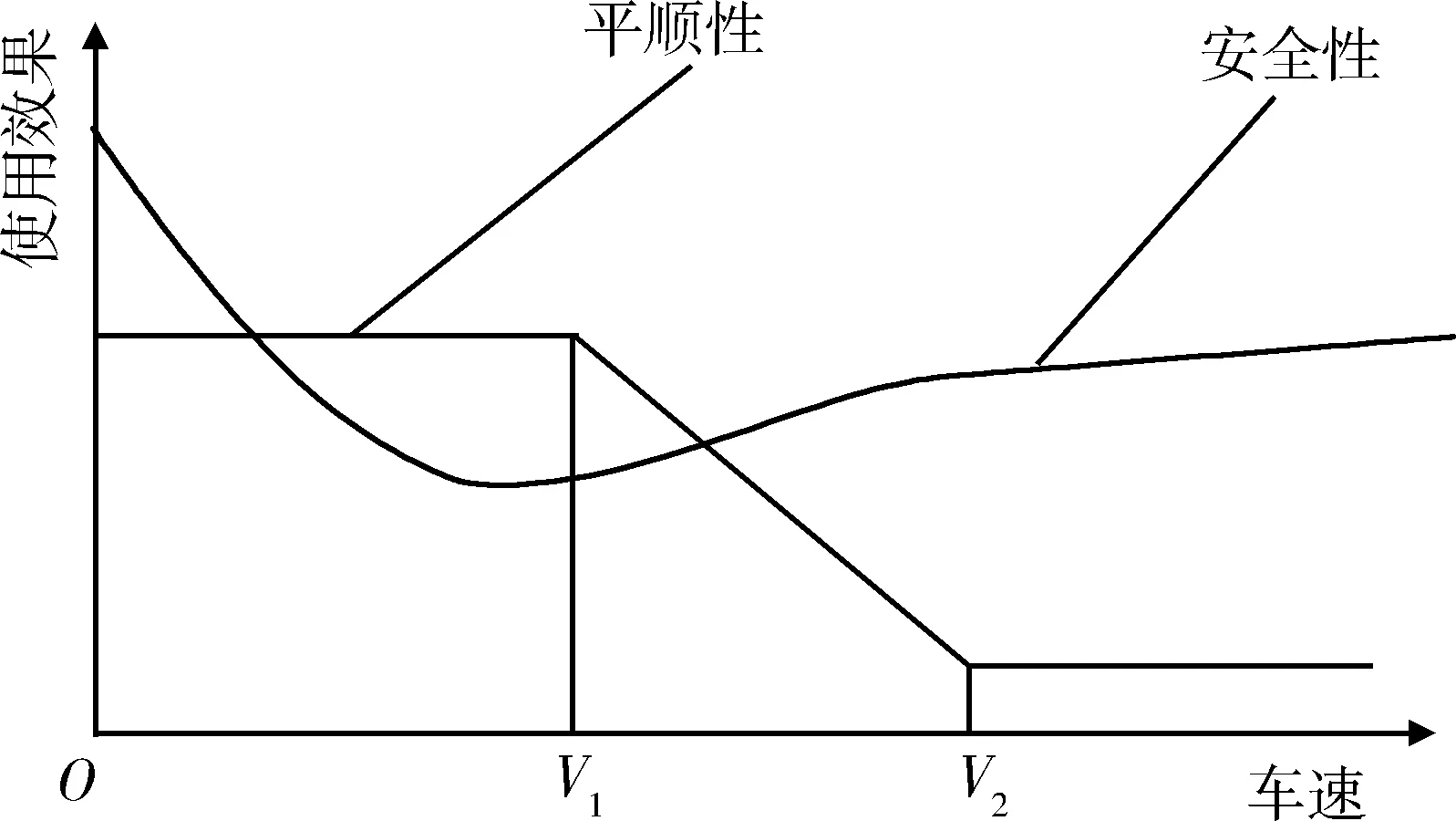
图1 理想减速带的使用效果与车速关系
2 圆弧相切式单向减速带模型
为了避免传统圆弧减速带的缺点,满足理想减速带特性,提出一种圆弧相切式单向减速带.其横截面轮廓的最大特点是由两段相切的圆弧构成,且去车面的圆弧与地面相切.以减速带最高点垂直于水平面的垂线为y轴,水平地面减速带宽度方向为x轴建立坐标系,如图2所示.

图2 圆弧相切式单向减速带截面轮廓
图中:a为减速带迎车面宽度;b为减速带去车面宽度;H为减速带高度;r1为迎车面圆弧半径;r2为去车面圆弧半径.
若减速带宽度为L,根据几何关系,可以得到
a+b=L.
(1)
当a=L/2时,凹形圆弧消失,整个截面轮廓实际上就成了传统圆弧减速带截面轮廓.为保证减速带的高度为H,a应满足
a≥H.
(2)
这里引入减速带轮廓参数λ,令λ=a/b,其应当满足
(3)
可以得到圆弧相切式单向减速带的解析表达式:

(4)

根据减速带模型的解析式,给定高度H、宽度L以及轮廓参数λ即可得到圆弧相切式单向减速带的准确轮廓.
3 仿真模型的建立
考虑到汽车在通过减速带时,左右轮胎运行轨迹具有极大的相似性,可以认为左右轮胎的输入模式基本一致,而且车辆的质量分布和几何尺寸一般认为左右对称.因此,文中建立4自由度半车模型进行分析,如图3所示.
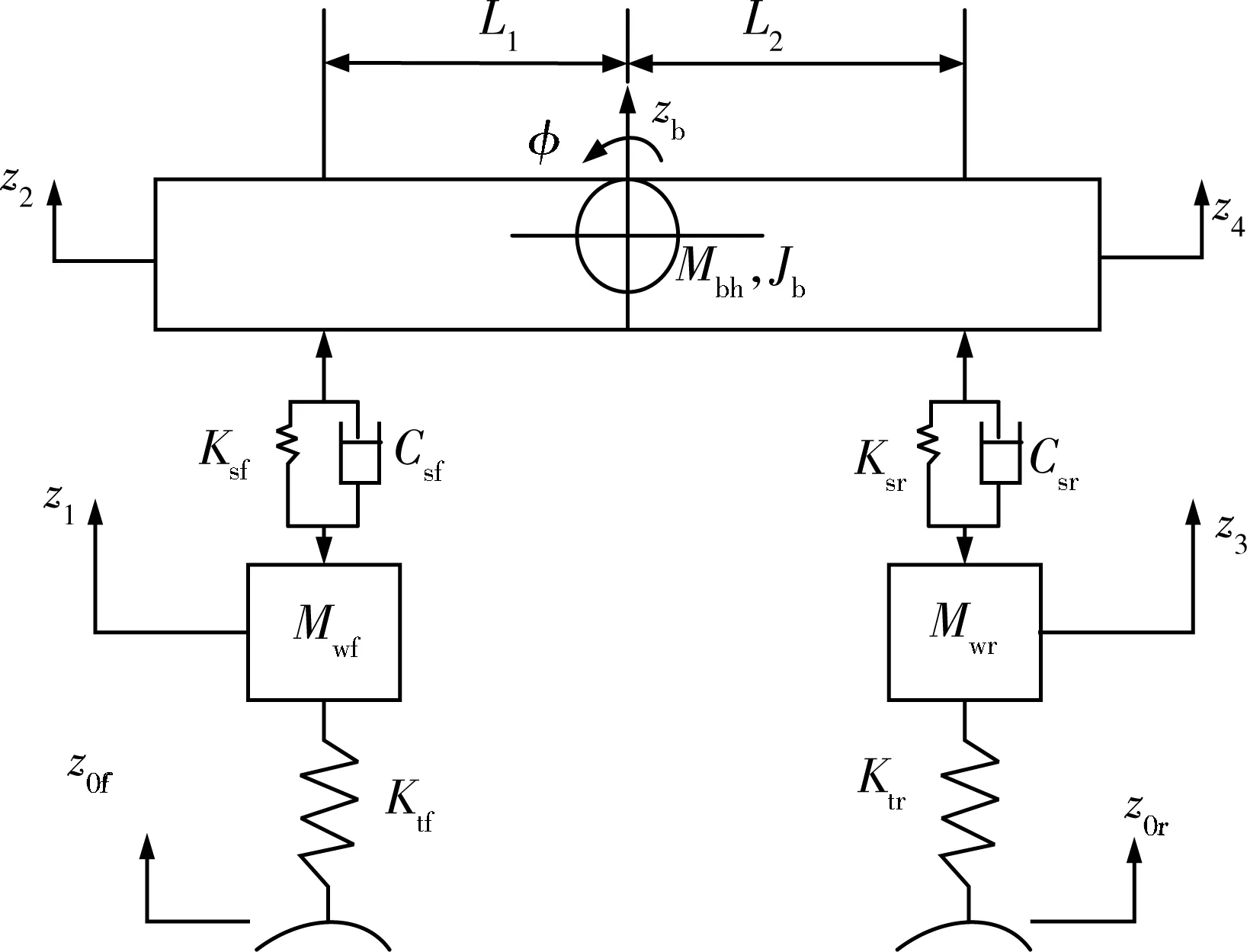
图3 4自由度半车模型
图中:φ为车身俯仰角;zb为车身质心垂向位移;Mbh为1/2车身质量;Jb为半车转动惯量;z1、z3分别为前、后轴非簧载质量垂向位移;z0f、z0r分别为前、后轮地面输入;Ktf、Ktr分别为前、后车轮的轮胎刚度;Mwf、Mwr分别为前、后车轮质量;Ksf、Ksr分别为前、后悬架刚度;Csf、Csr分别为前、后悬架阻尼;L1、L2分别为前、后桥到质心的距离.
根据Lagrange方程,可以得到系统方程
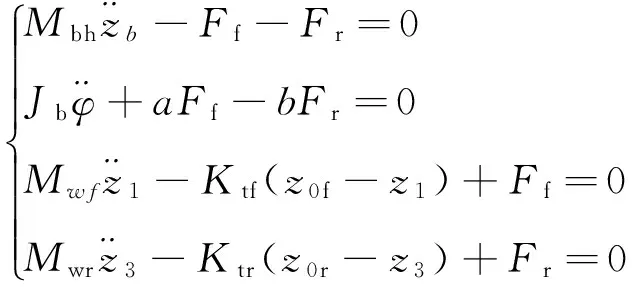
(5)
式中:

(6)
当俯仰角较小时,可以近似地认为:
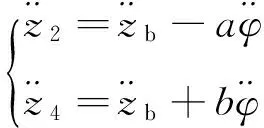
(7)
根据上述方程,即可在MATLAB/Simulink中建立4自由度半车仿真模型.并选择5种截面形状的减速带进行仿真分析.减速带截面轮廓即作为前、后轮地面输入.表1为5种减速带参数.其中,A为传统圆弧减速带,B、C、D、E分别为不同轮廓参数λ的圆弧相切式单向减速带.
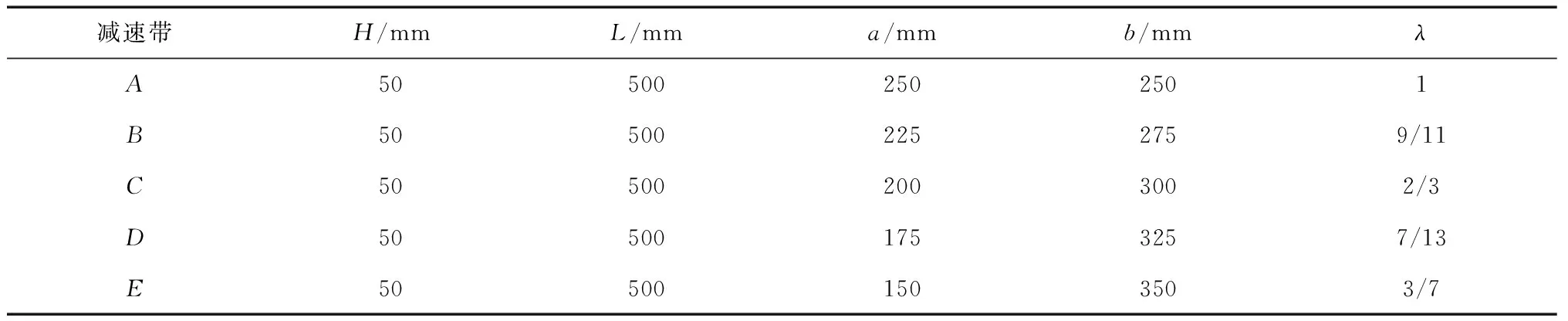
表1 减速带参数
4 仿真及结果分析
经过仿真可以得到一定车速条件下,不同减速带地面输入时的车身质心垂向加速度曲线.以车速v=10 km/h、20 km/h为例,如图4所示.
从图4中可以看出,汽车以一定车速通过减速带时,垂向加速度响应曲线出现了两个较大波峰和两个较大波谷.波峰是由汽车前、后轮接触减速带迎车面产生,波谷是由前、后轮离开减速带接触地面产生.减速带类型不同,垂向加速度响应也有所不同.可见,在一定的车速下,减速带截面轮廓对车身质心垂向加速度产生了影响.同时,车身垂向加速度响应也随车速的变化而变化.
对于减速带的平顺性评价,文中选取车身质心垂向加速度峰值(正向峰值和负向峰值的数值最大)ac作为指标.根据理想减速带特性,汽车以低于限速通过减速带时,ac应当小一些,以提高平顺性;而高于限速时,ac应当更大一些,降低平顺性,这样就可以增加减速带的限速效果.根据仿真结果可以得到汽车通过不同减速带时ac与车速之间的关系,如图5所示.
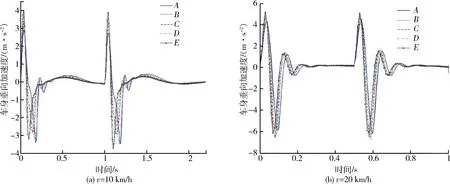
图4 汽车通过不同减速带时车身垂向加速度曲线
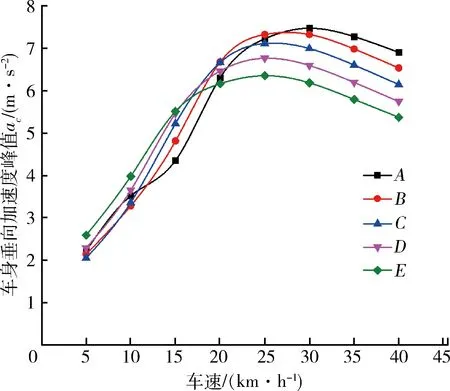
图5 汽车以不同速度通过减速带时的ac曲线
从图5可以看出,在人体对振动加速度的极限容许值3.5~4.5 m/s2的车身垂向加速度区域,车速在10~15 km/h,即为减速带限速.随着车速的增加,汽车通过5种减速带的ac一开始均增加.在车速增大到25 km/h左右时,ac趋于平稳,甚至开始有所减小,这一趋势符合理想减速带安全性特性.可见所提出的圆弧相切式单向减速带与传统圆弧减速带都满足理想减速带的行驶安全性需求.
在车速高于10~15 km/h限速范围时,所有圆弧相切式单向减速带的ac都相比圆弧减速带A有所增大,即均降低了汽车高于限速时通过的平顺性.但在高于限速部分,D、E曲线在车速v=20 km/h左右即开始低于圆弧减速带A,而B、C则在车速v=25 km/h左右时开始低于圆弧减速带A.即B、C减速带降低汽车通过平顺性的范围大于D、E减速带.其中,B减速带范围最大.
在车速低于10~15 km/h限速范围时,以v=5 km/h为例,对仿真结果进行分析处理,得到4种圆弧相切式减速带相对于传统圆弧减速带A的车身垂向加速度峰值增量,如表2所示.可以看出,B、C曲线的车身垂向加速度峰值低于圆弧减速带A,增量为负.且减速带C相对于传统圆弧减速带A减小得最多,为7.7%.而D相比圆弧减速带A增加了3.1%,E甚至增加了16.7%.可见,所提出的圆弧相切式单向减速带中,B、C能够在低于限速时,相对于圆弧减速带增加汽车通过的平顺性.

表2 v=5 km/h时相对于圆弧减速带A的ac增量
综合起来看,相对于传统圆弧减速带,B、C减速带能够满足理想减速带特性,达到针对10~15 km/h限速范围的限速目的.即轮廓参数λ在2/3~9/11范围时,汽车低速通过圆弧相切式单向减速带的车身垂向加速度峰值响应低于传统圆弧减速带;高速通过圆弧相切式单向减速带的车身垂向加速度峰值响应高于传统圆弧减速带.
5 结 论
1)所提出的圆弧相切式单向减速带能够影响汽车通过时的车身质心垂向加速度,从而影响汽车的平顺性.
2)针对10~15 km/h的道路限速,相对于传统圆弧减速带,圆弧相切式单向减速带轮廓参数λ在2/3~9/11范围时,能够提高汽车低于限速通过的平顺性,且一定范围内降低汽车高于限速通过的平顺性,满足理想减速带特性,限速效果明显.
[1]黎熊,刘彩,邱望标.道路减速带形状对车辆平顺性影响的研究[J].轮胎工业, 2010,30(1):54-56.
[2]王剑波,叶燕仙.城市道路减速带的人性化设置[J].道路交通与安全,2007,7(3):42-44.
[3]Watts G R, Krylov V V. Ground-borne vibration generated by vehicles crossing road humps and speed control cushions[J]. Applied Acoustics, 2000, 59(3): 221-236.
[4]王松.车辆通过道路减速带时的冲击荷载特性研究[D].青岛:青岛大学,2014.
[5]任玉晓.基于ADAMS/CAR的汽车通过减速带时的平顺性及行驶安全性研究[D].西安:长安大学,2009.
[6]徐维盈.基于ADAMS/CAR的高速公路减速带对车辆行驶平顺性及安全性影响研究[D].西安:长安大学,2012.
[7]张韡,魏朗,余强.道路减速带对车辆平顺性和安全性的影响[J].长安大学学报(自然科学版),2008,28(4):95-98.
Characteristics Simulation and Optimization for Arc TangentOne-way Speed Bump
HU Wen,YANG Lin
(School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China)
Even though passing through a traditional speed bump at a lower speed limit, a vehicle produced obvious vibrations. In view of this situation, an arc tangent one-way speed bump was designed, a 4 DOF math model of the vehicle was built, and the simulation analysis of its ride comfort was conducted in MATLAB/Simulink. The results indicated that, when the vehicle passed through the one-way speed bump with certain contour parameters at a lower speed, the peak vertical acceleration of its body was lower than that passing through the traditional one; and when passed at a higher speed, the corresponding peak value was higher. The results also verified that the designed speed bump could overcome the shortcomings of the traditional one and the effective speed limit was implemented. The contour of the arc tangent one-way speed bump was optimized.
speed bump; arc tangent; ride comfort; peak vertical acceleration
1009-4687(2016)02-0007-05
2016-3-16
胡文(1991-),男,硕士.
U417
A
猜你喜欢
物理教师(2022年3期)2022-04-18 06:15:06
纺织科学研究(2021年6期)2021-12-02 20:32:56
数学小灵通(1-2年级)(2021年9期)2021-10-12 05:37:08
装备制造技术(2020年9期)2021-01-26 00:15:08
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
测试技术学报(2018年4期)2018-07-10 03:39:32
中学生数理化·八年级物理人教版(2018年5期)2018-06-21 08:01:40
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:36
新闻前哨(2015年2期)2015-03-11 19:29:30
