无虚拟控制律的高超声速飞行器新型模糊控制
2020-09-03 10:46:18李广剑何广军吴亚晖李兴格
航天控制 2020年4期
李广剑 何广军 吴亚晖 李兴格
1.空军工程大学防空反导学院,西安 7100512.空军预警学院雷达士官学校,武汉 430345
0 引言
吸气式高超声速飞行器(AHV)是一类在临近空间以吸气式超燃冲压发动机为动力,飞行速度超过5Ma的飞行器。由于飞行速度快、航程距离远、突防能力强,高超声速飞行器成为军用国防领域的研究热点。与其他的飞行器相比,高超声速飞行器具有更复杂的耦合问题、弹性振动问题以及不确定性。为了提高高超声速飞行器控制系统的整体性能,国内外研究人员均展开了许多研究。
近年来,关于高超声速飞行器控制的研究取得了许多成果。例如,输入受限控制[1-3],滑模变结构控制[4-7],神经网络控制[8-10],以及预设性能控制[11-12]等。文献[13]提出在AHV中应用反演方法对于系统的扰动和不确定性项目进行逼近,但没有考虑弹性体形变的影响,且选择的模糊函数比较繁琐。文献[14]在再入飞行器中基于动态面,引入非零和博弈理论设计模糊自适应控制器,取得了一定进展。文献[15]提出了基于ESO的模糊自适应控制器,采用Nussbaum增益技术减少学习量,但是依然没有摆脱模型限制。胡超芳[16]等提出了模糊自适应的AHV容错控制,控制律设计过程以及控制律的形式相对复杂。文献[17]采用预设性能神经网络控制器,但是预设性能控制缺少严格统一的稳定性分析方法,并且在应用中会用到猜测量,在实际控制中猜测量一般难以获取。
基于以上研究,提出了一种无虚拟控制律的高超声速飞行器新型模糊控制方法。与反演控制相比,对于高度与速度子系统,每个系统只有一个模糊函数逼近器逼近总未知项,减少了传统反演控制中的过度模型依赖,也提高了系统的鲁棒性能。基于范数估计策略设计模糊函数,减少了在线学习参数,保证了系统实时性。最后基于仿真,验证了控制方法的有效性能。
1 模糊系统理论预备
模糊控制的本质,是将模糊规则和逻辑融入到控制器中。在按照一定模糊规则设计的情况下,模糊系统能以任意精度逼近给定的非线性连续函数[18-19]。与神经网络和多项式函数逼近相比,模糊函数的优势在于能根据模糊逻辑进行有效的控制。
引理1[18]对于任意给定的实函数F(X)在紧集Ω上,一定存在一个模糊系统,使得
|F(X)-y|<μ
(1)
其中,μ>0,y为模糊系统的输出变量,F(X)为非线性实函数。
根据模糊集的工作机理,假设X为模糊系统的输入变量。首先将清晰点X映射到模糊集A上;然后根据模糊机理推理,把模糊集A映射到模糊集B上,最后把模糊集B解模糊化,得到清晰的输出y,实现从U到V的映射。则模糊系统可以表示为
y=θTξ(X)
(2)
式(2)中,输入向量X=[x1,x2,…,xn]T∈Rn,模糊系统权系数参数向量θ=[θ1,θ2,…,θp]T∈Rp,ξ(X)=[ξ1(X),ξ2(X),…,ξp(X)]T∈Rp为模糊基函数,模糊基函数表示为
(3)

2 模型建立
先前学者们大多采用美国空军实验室提出的Paker模型[20]。模型忽略了系统的一些弱耦合因素和慢动态项,建立的面向控制的模型如下所示
(4)

(5)
(6)
(7)
(8)
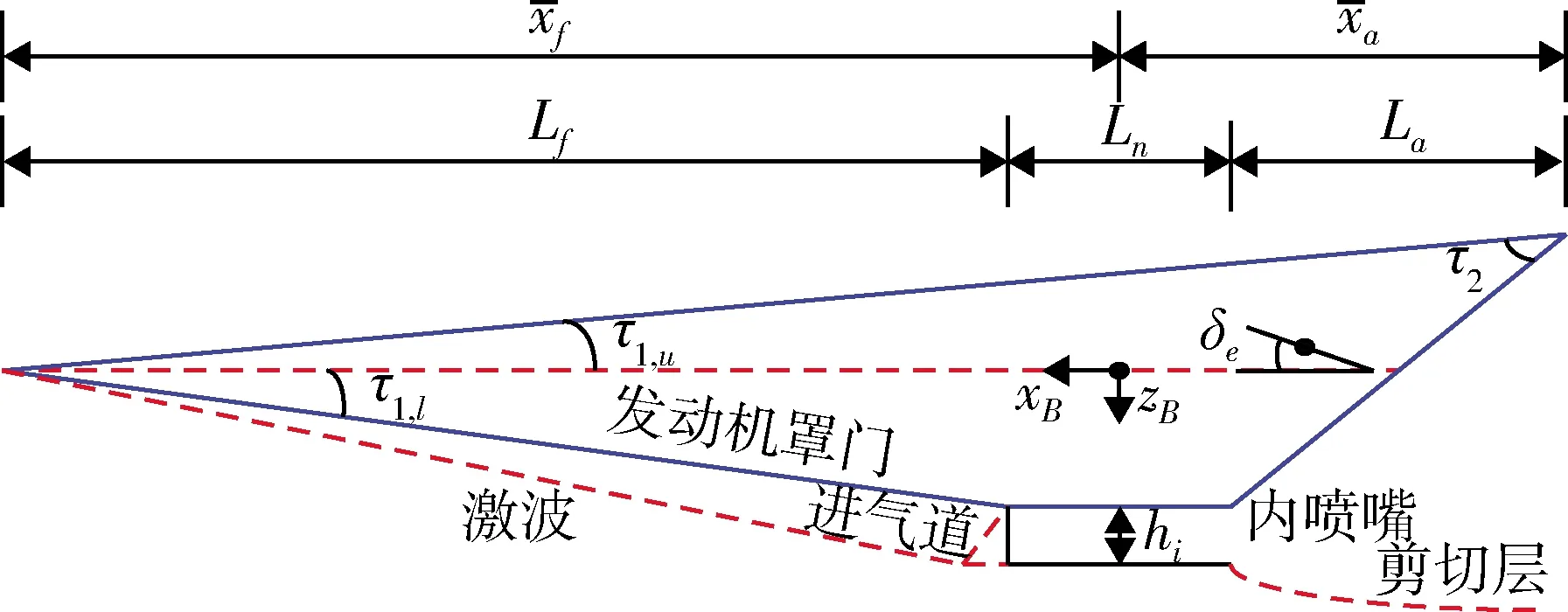
图1 AHV模型几何构型
其中,AHV的飞行速度和高度分别表示为V和h;飞行航迹角为γ;飞行俯仰角以及俯仰角速率为θ和Q;飞行器离地心的距离为r;m为AHV的质量;俯仰转动惯量用Iyy表示;定义飞行攻角为α=θ-γ。在AHV的弹性状态中,η1和η2分别为AHV的弹性状态,ζ1和ζ2为弹性状态阻尼;ω1和ω2为弹性状态的振动频率;N1和N2为广义弹性力;
φf(·)和φa(·)为振型函数[20]。
对于AHV所受的升力L、推力T、阻力D、俯仰力矩M以及广义弹性力N1和N2的具体大小,可以通过拟合式进行表示:


3 控制律设计
3.1 高度控制律设计
在AHV高度子系统的设计中,其控制目标是通过选取合适的反馈控制输入δe实现对于参考高度href的稳定跟踪。
首先将高度子系统写成严格反馈的形式,并且使用一个模糊逼近器对其进行在线逼近。
高度子系统的严格反馈形式为
(9)
式中,

两式均为未知的连续非线性函数。
此时,高度子系统的控制目标便为选取合适的反馈控制输入δe使得γ→γd。
设计航迹角的参考输入为
(10)
其中,kh1∈R和kh2∈R分别为待设计参数,且为正值。
定义航迹角的跟踪误差及其一阶导数为
(11)
(12)
设计过渡变量θd,θd可以表示为
(13)
其中,kγ1∈R和kγ2∈R分别为待设计参数,且为正值。
定义俯仰角的跟踪误差为
(14)
将式(13)代入式(14)可以得到
(15)
求式(15)时间的一阶导数,并代入式(9)得

(16)
将式(12)代入上式(16)可以得到

(17)
设计过渡变量Qd,Qd可以表示为
其中,kθ∈R为待设计参数,且为正值。
定义俯仰角速度的跟踪误差为
(19)
将式(18)代入式(19)中可以得到

(20)
将式(9)、式(12)和式(16)分别代入式(20),并求时间的一阶导数,可以得到

整理后可以得到式(21)

(21)


(22)
其中,kQ∈R为待设计参数,且为正值。
将式(15)代入到式(20)中可以继续得到

(23)
将式(23)代入式(22)可以得到

(24)
(25)

(26)

(27)
式中,λ1∈R为待设计参数,且为正值。
3.2 速度控制律设计
在速度子系统中,其控制目标是通过选取合适的反馈控制输入Φ实现对于参考速度Vref的稳定跟踪。
将AHV速度子系统式(4)改写为式(28)
(28)
式中,FV=[Tcos(θ-γ)-D]/m-gsinγ-Φ为未知的非线性连续函数。
定义速度的跟踪误差为
(29)
求式(29)时间的一阶导数,将式(28)代入得
(30)
因FV未知,利用模糊系统进行逼近,即
(31)

设计速度控制律为

(32)
其中,kV1∈R与kV2∈R为待设参数,取正值。

(33)
其中,λ2∈R为待设计参数,且为正值。
整个控制律的设计过程以及控制系统结构如图2所示。
注2 文献[22]引入了虚拟控制量设计控制律,效果良好但求取虚拟控制量的一阶导数比较繁琐。本文采用反演控制方法,实际控制律只需一个模糊逼近函数求取,相比之下算法更简洁。
注3 本文基于范数估计思想,不是对模糊函数中的权值元素进行调整,而是采用调整权值范数的方法,降低了控制方法的计算量。

图2 AHV模型控制结构图
4 稳定性分析
4.1 高度子系统稳定性分析
定理1 如果AHV闭环高度子系统满足式(9),控制律满足式(26),自适应律采用式(27),则高度子系统控制系统局部渐近一致稳定。
证明 将式(13)和式(14)代入式(12)中可以得到
(34)
将式(18)和(19)代入式(17)中可以得到

(35)
应用式(24)与(25)可以变式(26)为

(36)
将式(22)代入上式(36)中,可以得到

(37)
将上式(37)代入式(21)可得

(38)
定义φ1的估计误差为
(39)
选取Lyapunov函数为
(40)
对式(40)求时间的一阶导数,并将式(21)、式(34)、式(35)和式(39)代入可以得到

(41)
考虑到有

(42)
(43)
又因为

则式(41)可以转化为

(44)

(45)

(46)

定义如下紧集


4.2 速度子系统稳定性分析
定理2 如果AHV闭环速度子系统满足式(13),控制律满足式(38),自适应律采用式(37),则速度子系统控制系统局部渐近一致稳定。
证明 证明与定理1类似,此处略。
5 仿真验证
以飞行器纵向运动模型为系统的被控对象,对参考速度和参考高度进行跟踪仿真,用四阶龙哥库塔法进行求解,仿真步长设定为0.001s。飞行器的初始运动速度为2500m/s,运动高度为h=27000m,其中速度阶跃为ΔV=100m/s,高度阶跃为Δh=700m,控制器参数选择为:kV1=1.5,kV2=1,kγ1=8,kγ2=0.01,kθ=8,kQ=8,λ1=0.05,λ2=0.05。速度和高度的参考输入的阻尼比为0.9,自然频率为0.1rad/s。模糊系统中,隶属度函数选高斯基函数,设置每个变量的模糊集合为100个。速度子系统中输入变量V的每个模糊集合的模糊中心iV在[2500,2800]内均匀分布,高度子系统中输入变量
V、γ、θ和Q的每个模糊集合的模糊中心iV、iγ、iθ和iQ分别在[2500,2800]、[-1.1°,1.1°]、[0°,11.5°]和[-5.7°/s,5.7°/s]的区间内均匀分布。上述变量的隶属度函数如表1所示,在下列情型下进行仿真。
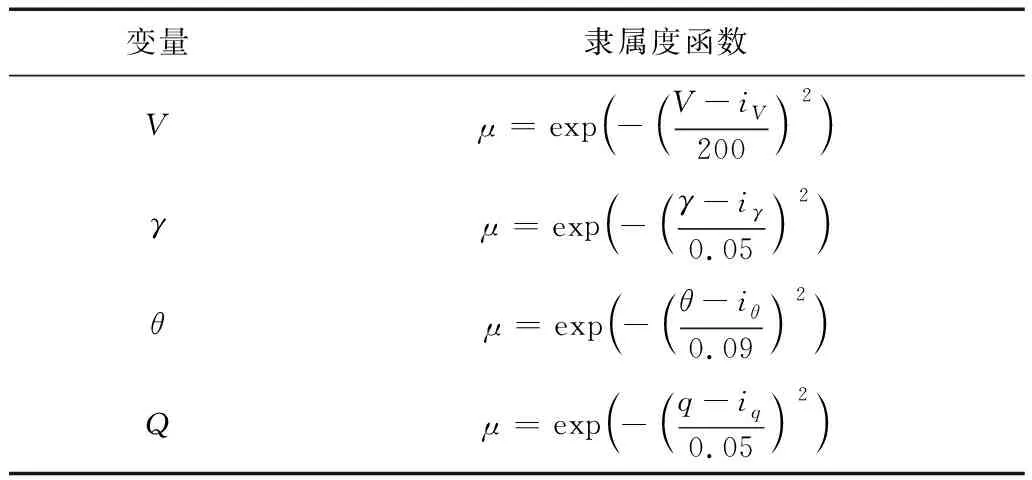
表1 各个变量的隶属度函数
情形:假设AHV模型的气动系数存在±40%的摄动量,在运行时间超过50s之后加入摄动量为C=C0[1+0.4sin(0.1πt)],其中C0表示气动系数的标称值。采用本文的方法(方法1)和文献[22]中提及的方法(方法2)进行对比仿真。
分别采用本文的方法和文献[22]中提及的方法进行对比仿真。
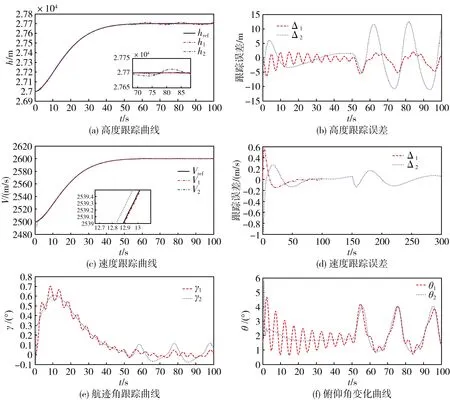
图3 情形1的对比仿真结果
从图3的对比仿真中可以看出,本文提出的方法与文献[22]中提出的方法在存在参数摄动时,AHV在输入连续阶跃指令时都能实现对于高度h与速度V的稳定跟踪(见图3(a)~ (d)),并且本文方法的跟踪精度与抗干扰能力明显优于文献[22]中的方法,具有很强的鲁棒性。从图3(e)~(h)中可以看出,本文方法对于输入控制和飞行器的姿态角度的控制都处于合理范围,且比较平滑,有效防止了高频抖振现象的产生。从图3(i)和(j)中可以看出,采用本文方法时,AHV的弹性状态也比较平滑,没有产生高频抖振现象,弹性状态在合理范围内。图3(k)和(i)反映了新型模糊控制下,对于φ1和φ2的估计效果。综上可以看出,本文提出的新型模糊控制方法具有一定的优势。
6 结论
提出了一种无需虚拟控制律的新型模糊控制方法,可实现对于AHV高度指令和速度指令的稳定鲁棒跟踪。与传统鲁棒反演控制方法相比,控制输入和飞行器姿态角度都处于合理范围且比较平滑,减少了高频抖振现象。模糊控制中,AHV的每个子系统仅需一个模糊逼近器对实际控制律进行逼近,无需对虚拟控制律以及其一阶导数进行反复计算求取,大大减少了系统的在线参数学习,保证了算法的实时性能,同时基于Lyapunov稳定性理论,证明了控制系统稳定性,保证了AHV闭环系统局部一致渐近稳定。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18 13:07:30
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
铁道通信信号(2020年3期)2020-09-21 09:13:00
吉林大学学报(理学版)(2020年3期)2020-05-29 06:31:40
三峡大学学报(自然科学版)(2019年5期)2019-10-17 02:24:22
铁道通信信号(2018年8期)2018-11-10 05:15:44
电子制作(2018年2期)2018-04-18 07:13:25
三峡大学学报(自然科学版)(2015年2期)2015-07-25 06:42:56
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12