基于PIC单片机的太阳能光伏系统闭环控制仿真
2020-08-29 01:55侯凯旋曾永铠潘绍棋李嘉豪
汕头大学学报(自然科学版) 2020年3期
侯凯旋,崔 岩,曾永铠,潘绍棋,李嘉豪
(汕头大学工学院,广东 汕头 515063)
0 概述
在光伏系统中,我们通常希望光伏组件能够保持最大功率输出,但是在日常使用的环境中,光照方向、温度等因素都对光伏组件输出功率产生影响,从而导致输出功率出现波动.如果此时不进行一定的调整,输出功率将不是当前状态下的最大功率输出,而实现最大功率跟踪的方法也有很多,例如增加电导法(INC)和干扰观察法(P&O),而我们的研究目的是在已知最大功率点电压的前提下,保证光伏组件输出电压在不同光照强度下能够快速地稳定且尽可能稳定在最高功率点电压.为了能够实时监控输出端电压并进行适时的调整,我们结合所学知识,决定使用PIC单片机作为控制环节的主要器件,并且编写相应的PID控制程序来保证输出端电压的稳定性以及电压调整的快速和准确.
1 光伏系统模型
1.1 光伏电池
光伏电池能够将太阳能转化为电能,其输出功率受环境温度、光照强度影响.光伏电池的内部结构由PN结组成,其光电效应我们可使用电流源、二极管并联及等效阻抗进行模拟,如下图1所示.

图1 光伏电池等效电路
Rsh和Rs相当于光伏电池的内阻,Iph为整个电路的总电流,Id为通过PN结的总扩散电流,I为太阳能电池的输出电流.Rs和Rsh相比较,Rs阻值更小,因此可等效认为内阻Rsh上的电流可以忽略不计[1-2],即相当于开路.因此光伏阵列模块可设计为如图2所示.
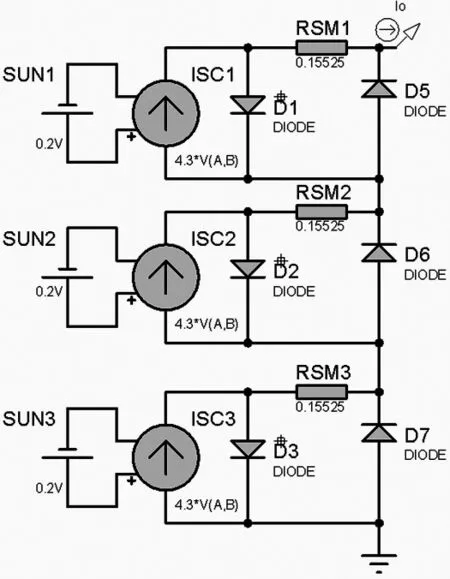
图2 光伏阵列模块
该光伏阵列由三个光伏电池组成,通过改变电源电压来模拟光照强度的控制.
1.2 DC/DC变换电路
DC/DC电路是整个系统的关键部分,通过调节控制DC/DC变换电路的开关器件,将一种直流电压变换成另一种直流电压.通过综合考量,此次我们采用Boost升压电路.它由电容C1、电感L1、功率开关Q2、二极管D以及滤波电容C2构成.其中电容C1的作用是为Boost电路产生的高频电流提供通路,以确保光伏阵列输出近似稳态的电流,从而可以忽略阵列的滞后性,因此只要通过改变占空比来进行最大功率跟踪.

图3 boost升压电路
1.3 单片机模块
使用PIC16F873单片机作为控制部分的主要器件,通过编写PID控制程序,使其实现对输出电压的调整.PIC单片机会通过ADC端口对光伏电池的输出电压值和给定电压值进行采样量化,将量化后两者的数据进行比较来判断光伏电池的输出电压是否达到给定电压.
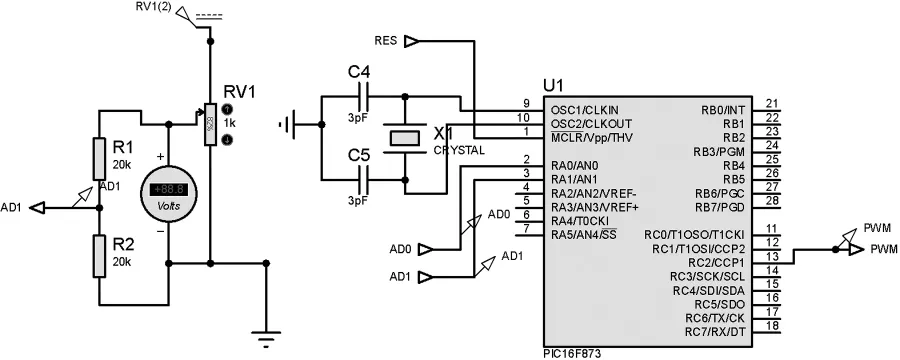
图4 单片机模块
2 最大功率点电压探索
最大功率点是光伏组件的最优工作点,它主要取决于光伏电池板工作时的温度和光照强度,而最大功率点对应的工作电压,称为最大功率点电压.由于本文不涉及对光伏电池板工作温度的探讨,故不重点考虑该因素.
要使光伏电池板工作在最大功率点,就需要使用光伏最大跟踪(MPPT[3]).MPPT最重要的就是找出合适的MPPT算法,使光伏电池板在不同光照强度的情况下都尽可能地工作在其最大功率点电压上,从而让光伏电池板能够始终工作在最优工作点上.目前应用较多的算法有恒压跟踪法[3](CVT),爬山法[3](P&O)和增量电导法[3](INC)等.本文采取恒压跟踪法.
首先,通过调节光伏组件的参数,使系统在光强为1000 lx下的最大功率点电压为9 V,改变输入光强,观察最大功率点电压的变化.
由图5可以看出,当温度一定时,不同光强下光伏电池板的最大功率点几乎落在同一条直线上,说明可以把该电池板的最大功率点电压曲线近似地看成一根v=9的垂直线.所以让光伏电池板的给定电压恒为9 V就可以实现“让电池板始终保持在最大功率点”这个要求.
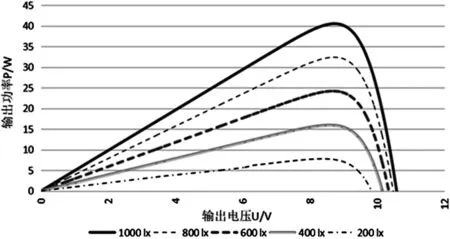
图5 相同温度不同光强下的P-V图
3 PID控制算法
常见的PID控制器的输入输出关系为:

由于单片机是根据采样时刻的偏差值计算控制量,因此式中的积分和微分项不能直接使用,需进行离散化处理.现以一系列的采样时刻点kT代表连续时间t,以和式代替积分,以增量代替微分,则可作如下近似变换[4]:
最终可得离散PID表达式为:

其中Kp为比例部分的系数,Ki为积分部分的系数,Kd为微分部分的系数.
e(k)=uo(k)-u(k),e(k)为第n次采样的光伏电池组件输出电压和给定电压值的误差值.我们根据离散PID表达式来编写程序,并且通过采样量化可以得到光伏电池模块输出电压和给定电压之间的误差值即e(k),根据PID增量式对其进行计算,可以得到一个最终变化量即Δu(k),该变化量可以用来作为调整输出PWM波占空比的依据,而不同占空比的PWM波输出至DC-DC电路部分则可以改变光伏电池组件输出端的电压值,这样即可实现:当光伏电池组件模块输出电压低于或高于给定电压时,通过对两者电压的采样量化,并根据离散PID公式进行运算,进而调整输出PWM波占空比,最终实现调高或调低光伏电池组件输出电压,使输出端电压始终向给定电压值靠近且最终两者误差值为0,同时输出端电压达到稳定.这样就可以实现动态实时跟踪最高功率点电压,且当光照强度改变时,也能及时调整输出端电压,使其快速稳定到给定值电压即最高功率点电压.
4 PID控制算法优化及仿真过程
已选定的最大功率点电压为9V,因此将PID控制给定值电压设定为9V,光强设定为1000 lx,经过设定之后,给定值电压将不再改动.程序中采用基于PID归一化参数整定法来对输出曲线进行调控.基于PID调节规律,先通过增大比例系数Kp使得曲线响应速度增快,再分别通过调整积分环节和微分环节对曲线的稳态误差和稳定性进行调整.优先考虑系统稳定性再考虑系统的品质,选取一较大控制度作为参考标准,作为初始调整的PID参数,同时设定DC-DC电路中储能电感的值为175 μH,输入电容为330 μF,此时输出电压曲线如图6所示,输出电压曲线超调量小,达到稳态的响应速度快,最终能够无振荡达到稳定,但是却有明显的缺陷,曲线出现阶梯状,同时伴有幅度变化剧烈的毛刺.
经过分析,伴有的毛刺来自于两种可能的情况:一、由于比例系数Kp较大导致的输出电压曲线的不稳定.二、这种伴有毛刺现象与电容电感的充放电有关,因为输入电容会影响电路的纹波[5]和噪声.基于这两种假设,分别进行仿真检验,设定三组检测组.检测一:在保证曲线稳态误差不出现明显增大的情况下,逐步减少比例系数;检测二:通过逐步增大输入电容观测输出电压出现的毛刺情况;检测三:逐步减小电感观测输出电压出现的毛刺和阶梯状情况.三种检测结果如图7~9所示,图7可知,对比例系数的调节,使得输出电压曲线变得稳定了,但是对毛刺影响十分微小;由图8可知,对电容调节,在输入电容逐步增大的过程中,输出电压曲线的毛刺逐渐减少,但是阶梯状仍然保留.由图9可知,对电感调节,当电感逐渐减小时,毛刺情况得到显著改善,阶梯减少了,但是曲线的平滑度却相对下降了,变得十分粗糙,曲线达到稳态所需要的时间也增加了.
通过调节电容和电感确实能够很大程度上减弱毛刺和阶梯状,但是随着电容的不断增加,发现输入电容是无法一直增大的,超过某一个界定的值就会导致protues仿真错误,在电容取到极限的状态下,配合电感的调整,曲线仍然有比较明显的粗糙和阶梯状.考虑到输出电压仍然保留的阶梯和细微毛刺会在实际应用中产生不良影响,所以继续对曲线进行毛刺和阶梯的优化.影响电容电感充放电过程除了材料之外,还有充放电时间,电容电感充放电时间受到单片机程序控制的PWM对三极管开关的调控.为了能够获取对电容和电感进行调节产生的优化效果的统一,以及加入晶振频率调整对曲线的优化,改变仿真设置的顺序,基于经验尝试,人为规定约束条件,Kp=0.348,储能电感值为35 μH,输入电容为2000 μF,对单片机工作时钟频率进行调整,从初始的4 MHz调整为12 MHz,将振荡电路的两个电容值调整为8 PF.此时得到的仿真结果如图10所示,曲线反应速度快,稳态误差小,阶梯状得到了进一步显著的改善,不再是出现陡峭的上升和下降,而是倾斜上升,毛刺几乎消失,超调量十分微小.
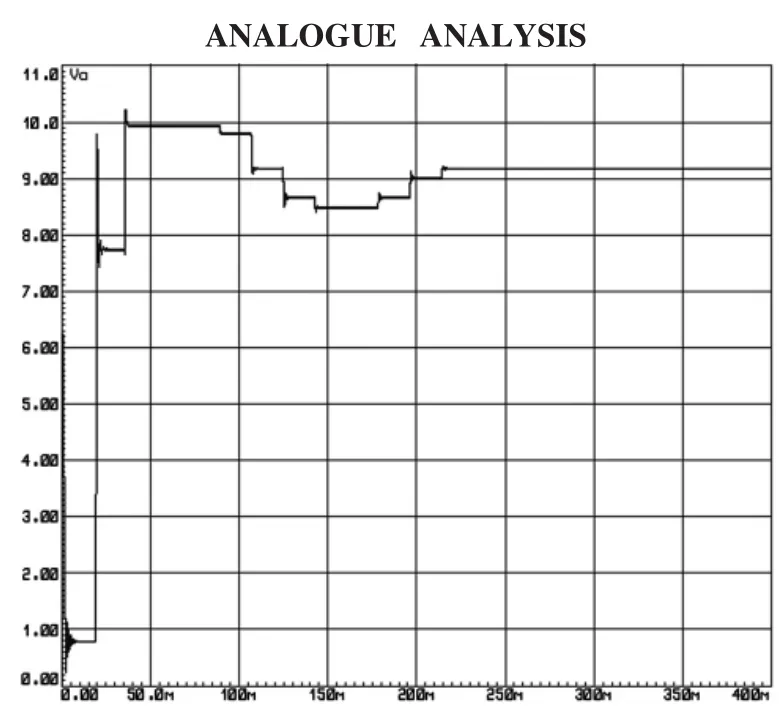
图6 通过PID程序控制的输出电压曲线

图7 调节比例系数后的输出电压曲线

图8 调节输入电容后的输出电压曲线
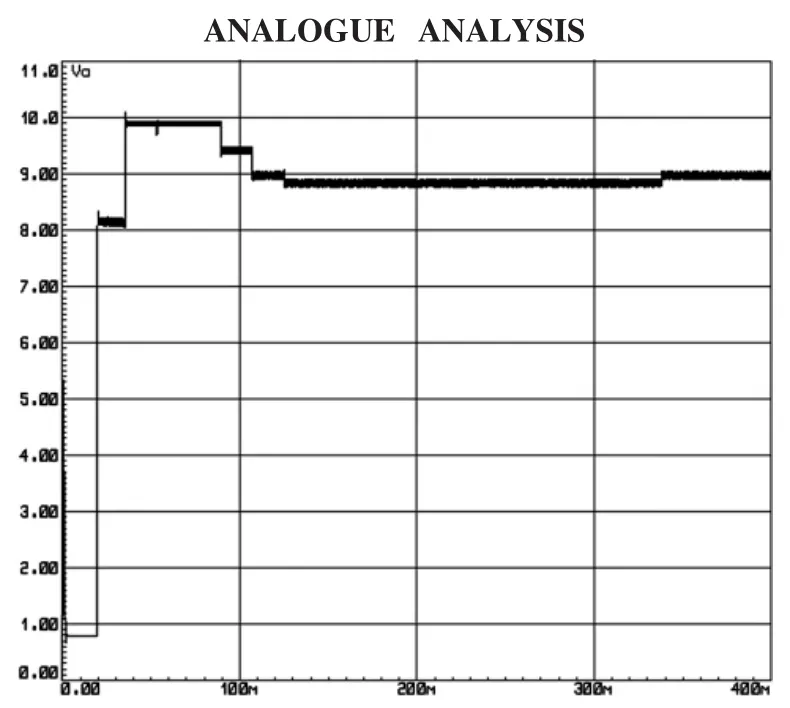
图9 调节储能电感之后的输出电压曲线
上述的调节是在1000 lx的光强下得到的结果,由于实际情况下,光强每个时刻都可能发生变化,为了检验该系统是否能够在不同光强下,满足性能指标,设定五组不同光强1000 lx、800 lx、600 lx、400 lx、200 lx,通过改变光伏组件电压值来模拟光强变化的情况.不同光强的仿真结果如图11~15所示,不同光强下的输出电压曲线指标性能见表1.5种不同光强下的输出电压曲线调整时间均在40 ms内;稳态误差最大值为0.18 V,最小值为0.08 V;超调量最大值为1%.经过一系列调节,光伏系统能够实现不同光强下,输出电压稳定在最大功率点电压.

图10 综合调节之后的输出电压曲线

图11 光强为1000 lx的输出电压曲线

图12 光强为800 lx的输出电压曲线

图13 光强为600 lx的输出电压曲线

图14 光强为400 lx的输出电压曲线

图15 光强为200 lx的输出电压曲线

表1 不同光强下的输出电压曲线指标性能
5 结论
本文提出基于PIC单片机的太阳能光伏系统且在该系统中进行闭环控制.为了能够更好的进行闭环控制,编写了相应的PID控制算法,并对其可靠性进行多次的仿真验证,通过分析仿真结果我们可以得到以下结论:
1)基于PIC单片机设计的闭环反馈系统在各个光照强度情况下均能正常工作,且能保证太阳能光伏模块在各个光照强度下输出电压均能稳定至最大功率点电压.
2)系统能够对输出端电压进行实时监控和调整,当输出端电压出现波动时,PIC单片机能够及时反应并使输出端电压快速地稳定至最大功率点电压.
3)使用PID控制算法进行控制使系统具有良好的性能指标,反应速度快,超调量小,输出结果误差小.
猜你喜欢
电气传动自动化(2022年4期)2022-08-04
军事文摘(2021年18期)2021-12-02
钣金与制作(2021年8期)2021-08-27
钣金与制作(2021年5期)2021-05-18
钣金与制作(2021年2期)2021-03-26
电加工与模具(2021年1期)2021-02-25
发明与创新·大科技(2020年6期)2020-06-22
科学之谜(2019年7期)2019-07-25
环球市场信息导报(2018年29期)2018-10-16
知识就是力量(2017年12期)2018-01-15