基于竞赛的智能除草机器人
2020-08-25 07:16:54郭映江陈毅豪
湖北农机化 2020年10期
郭映江 陈毅豪
(西北农林科技大学,陕西 杨凌 712100)
0 引言
通过实验设计了一种基于Openmv和机械臂的智能除草机器人系统,该系统主要包含3个模块,视觉识别模块、姿态解算模块、机械拔草结构模块。视觉模块通过openmv识别杂草并将获得的杂草反馈至姿态解算系统,姿态解算系统将解算出的电机转角反馈至并联机械结构的控制系统,然后机器人将机械爪平稳地移动至杂草的根部,机械爪将杂草拔离垄背,实现对杂草的清除。通过各个模块的相互协作,可准确、高效地清除,通过双目视觉识别和机械爪机器人运动学分析,提高了拔草作业的成功率。
1 研制背景及意义

图1
农田中的杂草是农业生产中的天敌,它们会与庄稼抢夺养分、水分、阳光等等,从而使庄稼的生长受限,无法获得更多、更好质量的庄稼。而现有的人工除草、化学除草、机械除草等都或多或少地有它们的缺点,劳动强度大,效率低,满足不了需求,对环境会造成污染,导致资源浪费严重。除草机器人应运而生,可以代替人们进行苦力劳动,减轻劳作强度,提高了生产能力和生产效率。
目前世界上最先进的除草机器人是由来自澳大利亚的昆士兰大学的学生研发的,机器人名字叫Agbot ll,它的除草效率是人工的5倍,一台机器人就可以轻松完成上百亩地的除草工作。机器人内部加入了世界先进的AI智能人工系统,可以通过先进的传感器设备准确分辨杂草和作物,做到不伤害作物。
德国农业专家研制出的除草机器人BoniRob,可以在农场的各种地块间极速穿行,准确找到杂草并清除,每分钟可以除掉120根杂草,比人工和药物除草都要快得多。
目前我国在除草机器人方面也有比较大的成就,但由于我国农业机器人起步较晚,所以未来的发展还需要我们共同努力。
2 竞赛规则简介
2.1 场地介绍
如图1所示。比赛场地为390×300cm的区域,共有5条田垄。场地四周用高12cm的围栏围住,只留有一个宽40cm的出入口,围栏与田垄之间留有宽40cm的通道(垄沟),垄长220cm、垄宽30cm、垄高12cm,相邻田垄之间也留有宽40cm的通道(垄沟)。出入口外侧紧邻比赛场地的40×100cm的区域为比赛启动区。

图2
如图2所示。围栏和田垄都采用钢质材料制作,地面采用爬行垫铺设。田垄、垄沟地面为灰色,围栏为黑色。比赛时会从6条垄沟中随机抽取2条垄沟,在其中放置宽40cm、长300cm(即与垄沟等长)的土棕色毛毯,以模拟松软路面。毛毯的软毛长度约为1.2~1.6cm。模拟蔬菜为生菜,高度约17cm,宽度约10cm。每条田垄的垄背上放置4~6棵模拟生菜,生菜距离垄端不少于10cm,起始位置随机,生菜间距为40±8cm。生菜底部使用泡沫胶黏贴在田垄上,并可采取适当固定措施进行加固。各条田垄上生菜的数量,在比赛前由不同的大赛评委抽签确定,具体放置位置由不同的评委随机放置确定。杂草使用5cm仿真足球草制成,裁剪为3×3cm小块,居中粘贴于图2所示基座上。
2.2 作业要求
比赛过程中,参赛机器人从比赛启动区出发进入比赛场地,沿垄沟(垄间作业模式)或骑着田垄(跨垄作业模式)行进,去除田垄上的杂草,遍历6条垄沟(或5个垄背)后,并停在比赛启动区。对参赛机器人的作业路径规划、杂草识别方法和具体除草方式没有限定,综合考虑作业速度和作业效果进行成绩评判。
3 除草机器人系统
3.1 系统简介
本项目主要包含3个系统,即机械抓拔草结构、视觉系统和姿态解算系统。工作过程中,视觉系统首先建立绝对坐标系,然后识别在坐标系中的杂草,将已识别出的杂草绝对坐标传送至姿态解算系统;姿态解算系统将坐标值解算为相对应的机械臂所转动的角度;机械抓拔草结构根据解算出的角度和规划出的电机转速最优变化规律进行运动,将机械爪移动至杂草的根部;机械抓除草系统将杂草拔离垄背至合理位置,传送至收集箱,完成整个除草过程。
除上述3个部分以外,本系统还包含另外2个重要的部分,分别为自动控制部分、电路和电器开关部分。前者整个系统可自动除草;后者为系统的总电路和分电路设置相应开关,增加急停开关,大大增加本系统的安全性。
3.2 机械结构及原理
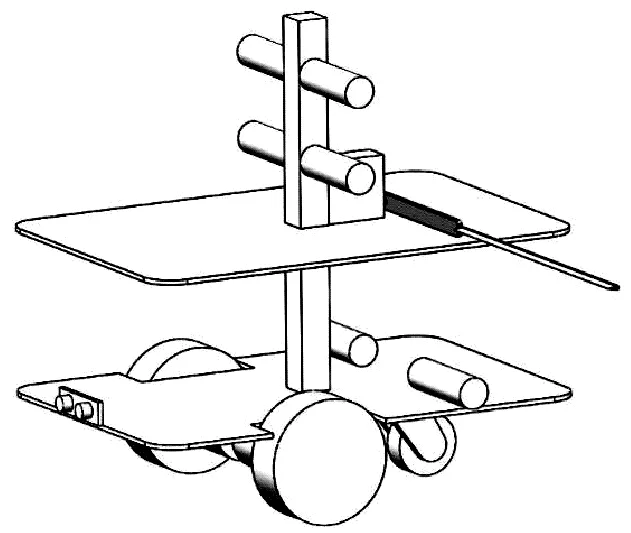
图3
机械结构简图如图3所示。主要由stm32主板、地盘、顶板、支柱、橡胶轮、万向轮、直流电机、机械臂、舵机和光电传感器等组成。
比赛时,从出发区开始,机器人依靠光电传感器和主板沟通,使其不撞到田垄的前提下遍历2条田垄(6个垄道)。上方2组4个传感器,再加上Openmv用于识别作物与杂草,控制机器人暂时停车,再经过姿态解算系统计算电机转角反馈至机械臂,进行除草作业。
3.3 创新点
(1)多种传感器结合,保证田间行走顺畅,适应不同地面情况,不漏垄错垄。
(2)采用渐进式横向旋转刀片,避免触及作物根系,还能将杂草斩断。
(3)利用光电传感器实现对作物和杂草的辨别,除草过程中避免伤及作物。
4 结束语
在农业机器人领域,还没有一个完善的田垄间除草机器人面世,本次智能农机大赛也是为了加强公众对该领域的关注,集思广益,发挥广大参赛者智慧。本文介绍的一种智能除草机器人,提供了一种新的解决方案,本身具有一定优势,同时也具有除草准确度不高,实战经验少等不足。
猜你喜欢
中老年保健(2022年6期)2022-08-19 01:44:10
辽河(2021年7期)2021-08-23 00:54:59
草业学报(2021年8期)2021-08-21 02:32:10
音乐教育与创作(2020年9期)2021-01-04 01:01:22
——歌剧《田垄之上》 选曲
音乐教育与创作(2020年8期)2020-09-17 05:03:36
农家参谋(2020年5期)2020-06-15 05:12:28
西北农林科技大学学报(自然科学版)(2018年6期)2018-07-23 09:54:20
食品与健康(2017年3期)2017-03-15 18:07:48
美食堂(2017年2期)2017-02-14 00:16:54
现代农业(2016年6期)2016-02-28 18:42:50