矿井提升机制动控制系统的优化研究
2020-08-21 05:22郭亮
机械管理开发 2020年7期
郭 亮
(阳煤集团五矿, 山西 阳泉 045000)
引言
提升机作为井下物料进出的通道,其运行的稳定性和可靠性直接关系到物料运输的效率和安全性。由于钢丝绳具有黏弹性特性,在制动的过程中存在巨大的动力冲击,导致提升机出现打滑、机架振动等,给提升机的运行安全与稳定造成了巨大的隐患,特别是随着矿井深度的不断增加,提升机的运行速度和制动稳定性之间的对立关系越发严重,因此本文分析一种新的矿井提升机制动控制系统。
1 提升机制动控制系统结构
矿井提升机的制动实际上是统控制信号对液压制动系统发出控制指令,通过控制液压系统电磁阀的开口度,实现对作用在制动盘上的制动力的控制,从而实现对提升机的恒减速平稳制动控制,该控制系统整体结构如图1 所示[1]。
由图1 可知,该矿井提升机制动控制系统主要包括了液压控制单元和电控单元,系统通过电控单元对液压系统进行控制。当提升机正常提升作业时,提升滚筒两侧的制动油缸打开,蓄能器内存储大量的高压油液,同时系统进入间隔供油状态,保持制动油缸的打开状态,当提升机接到制动信号后电磁换向阀得电换向,蓄能器内的高压油液通过比例溢流阀进入到制动油缸的无杆腔,开始对提升滚筒进行制动作业,此时设置在提升滚筒上的光电编码器对提升机的实际运行速度进行联系测定,将测量结果传递给微控制器,在微控制器内对数据进行分析后,输出电磁控制信号,由该电磁信号控制比例溢流阀的开口开度,从而实现对作用在提升滚筒上制动力的调节,满足不同制动条件下的安全制动需求,提升在制动过程中的稳定性和可靠性。

图1 矿井提升机制动系统结构示意图
2 提升机制动控制系统的检测核心光电编码器工作原理
为了解决传统的提升机测速装置在钢丝绳振动、冲击情况下监测稳定性差的难题,在该提升机制动系统上应用一种以光电编码器为核心的提升机运行速度检测系统。该光电编码器[2]设置在提升机的滚筒转轴上,提升机滚筒在转动过程中带动编码器码盘一起转动,随着滚筒的转动,光线将在编码器的码盘上形成一个扇形区域,该扇形区域包括了透明部分和不透明的部分,光线将从透明的部分穿过形成一个方形的脉冲波,同时电控部分将光电信号转换为提升机的运行速度及速度变化情况,实现对提升机运行状态的连续监控。光电编码器的码盘上分为两个扇区,两个扇区之间呈90°布置,不同扇区的信号包含有不同的数据信息,因此通过对光电信号的解读即可获取编码器的转动情况,统对计数过程中的脉冲信息数量的监测即可实现对转速、加速度、运行方向等数据信息的连续性跟踪处理,光电编码器的基本结构如图2 所示[3]。
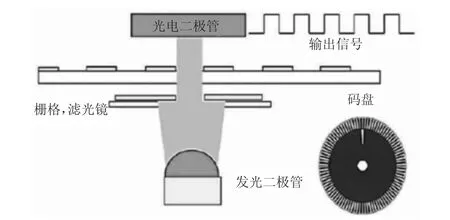
图2 光电编码器基本结构示意图
3 提升机制动系统控制逻辑
为了确保该提升机系统的制动稳定性和可靠性,根据提升机系统的结构和制动流程,对该制动控制系统的控制逻辑进行了设计,其结构如图3 所示[4]。

图3 提升机制动控制系统控制流程示意图
由图3 可知,该控制系统在工作时,首先通过光电编码器对提升机工作时的实际运行速度进行检测,然后将监测数据传输到系统的微控制处理器内,通过对控制中心的控制减速指令的对比,获取实际速度和理论速度之间的偏差,系统输出调整控制信号,信号经过比例放大器放大后控制比例溢流阀的开度大小,控制作用在制动机构上制动力的大小,通过该闭环反馈控制逻辑实现对提升机在不同工况下运行速度的合理调整和控制,实现恒减速的制动需求。
4 提升机制动控制系统的应用
为了对该提升机制动系统的实际应用效果进行分析,本文以JK-2.5×2.3P 提升机控制系统为改造对象,设置提升机的运行质量为7.6 t,最大运行速度为4.0 m/s,在当给制动系统一个制动信号后,对原控制方式和新的制动控制方式的制动效果进行跟踪测量,结果如图4 所示。
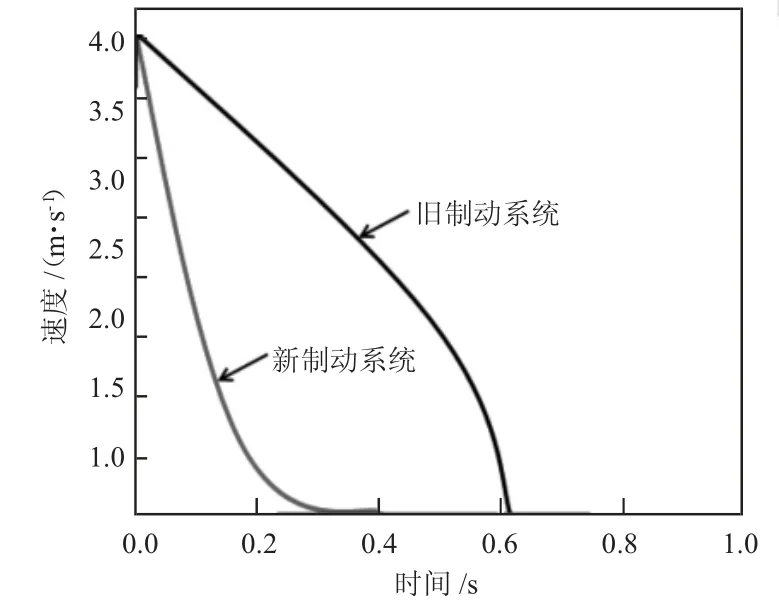
图4 不同制动控制方案下的制动效果
由图4 可知,在旧的制动控制系统下,制动时的制动时间约0.61 s,而新制动系统的制动时间仅0.3 s,比优化前降低了50.8%。旧制动系统下的制动距离约为3.2 m,新制动系统下的制动距离约为2.6 m,比优化前降低了18.8%,且在整个制动过程中未出现振动、冲击,制动稳定性得到了显著提升,极大地提升了制动系统的制动可靠性和稳定性。
5 结论
1)光电编码器测速装置能够有效克服提升机运行过程中的不稳定性带来的测速失真,能够实现对转速、加速度、运行方向等数据信息的连续性跟踪处理,此装置精度高,稳定性好;
2)新的制动系统制动时间仅0.3 s,比优化前降低了50.8%,制动距离约为2.6 m,比优化前降低了18.8%,提升了制动系统的制动可靠性和稳定性。
猜你喜欢
山东冶金(2022年4期)2022-09-14
网络安全与数据管理(2022年1期)2022-08-29
电子乐园·上旬刊(2022年5期)2022-04-09
铁道通信信号(2020年11期)2020-02-07
汽车与新动力(2019年5期)2019-11-07
铁道通信信号(2019年1期)2019-03-21
制造技术与机床(2017年7期)2018-01-19
中国资源综合利用(2016年10期)2016-01-22
探测与控制学报(2015年4期)2015-12-15
中国光学(2015年5期)2015-12-09