
地下停车场交通组织形式优化方法
2020-08-20 07:52赵怀柏苏贵民
交通与港航 2020年4期
赵怀柏,苏贵民,2
1.上海电科智能系统股份有限公司,2. 同济大学
地下停车场能缓解土地短缺,明显降低土地成本,是城市商业广场综合体常见形式之一。目前,国内大部分地下停车场仍旧采用的是传统停车模式,驾驶员需要根据车位状态指示灯的显示在停车场内绕圈来寻找车位,停车时间过长,给驾驶员停车带来了困难。虽然目前室外的地面定位导航已经相当发达,但是在地下停车场内,由于GPS信号弱等原因,传统停车模式在相当长的一段时间内并没有得到质的发展。
随着蓝牙、射频识别等技术的发展与智能手机的普及,地下停车场的停车模式逐渐向智能停车模式演变。在该停车模式下,系统会对进入地下停车场的车辆进行车牌识别,然后给车辆分配车位并引导驾驶员驶入规划车位。这个过程免去了驾驶员绕圈寻找车位的麻烦,能够让驾驶员快速准确地到达车位。众多学者对停车场内的寻位路径进行了优化。吴若伟等[1]运用迪杰斯特拉算法在大型停车场内部进行了最优泊车路径规划。刘姣等[2]也运用改进的迪杰斯特拉算法,规划了到达车位的最佳路径。赵柯柯[3]等将路径规划在app中加以实现。雷昆峰[4]基于驾驶员的行为,提出了影响驾驶员路径选择与停车场选择的因素,提出了动态路径诱导方法。郭海锋[5]等提出了一种带约束条件的A*优化算法,增加了泊车用户的泊车概率。
本文就对这种智能停车模式在大型综合商业体的应用进行了研究,对智能引导模式进行了交通流线的优化,为地下停车新模式优化方案的设计提供理论基础和技术支持。
1 地下停车场交通组织形式设计原则
智能停车模式通过智能引导,将驾驶员指引到规划车位,在引导过程中除了需要提供定位位置的硬件设备,合理高效的交通流线是提高效率的关键因素。地下停车场内部的安全高效可以为前来消费的顾客带来高品质的停车体验。地下停车场交通流线设计与其他结构设计不同,并没有专门的规范,且不同地下停车场具体情况不同,也不能用统一的标准来对地下停车场交通流线进行设计。因此,交通流线的设计需要因地制宜。通过研究不同的地下停车场流线设计实例,发现以人为本的设计理念和科学合理的设计原则是交通流线设计中的重要遵循。地下停车场的交通组织原则是:在保证不对外部交通形成冲击与干扰的情况下保证停车场内部交通的安全通畅。
1.1 外围交通组织
本文研究对象是综合商业广场地下停车场,此类车库一般位于城市中心的繁华地段,车流量大且集中,地下停车场进出口需要在周围市政道路上进行开口,即在进出口会形成与市政道路的T型交叉口。市政道路上行驶的车辆与进出地下停车场的车辆会在短距离内造成重叠的车流,从而引起交通拥堵与交通事故。因此,在交通设计时,应合理设计交叉口的交通组织形式。在交叉口处,适当地在时空上限制某一类型的车辆转弯通行,可以减少行车延误,减少冲突,确保行车安全[6]。在T型交叉口限制左转,采用“右进右出”的交通组织形式可以最大程度地减少冲突,保持交通组织的顺畅。
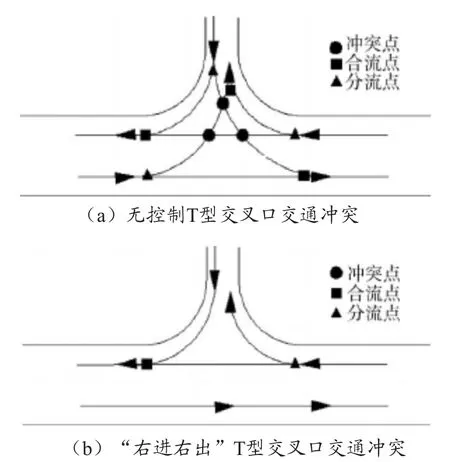
图1 交叉口冲突示意图[7]
如图1所示,分别为无控制T型交叉口和“右进右出”T型交叉口的交通冲突图。在无控制T型交叉口中,存在3个冲突点,3个合流点,3个分流点;而在右进右出的T型交叉口中,冲突点0个,仅存在1个合流点和1个分流点。可见,右进右出的T型交叉口交通组织形式最大限度减少了冲突点,降低了事故风险,减小了车辆进出延误,适用于地下停车场进出口处。
商业广场外围的顺时针交通组织,不仅可以使大多数地下停车场进出口采用右进右出的交通组织形式,减少车流冲突点,避免交通拥堵与交通事故,还符合我国道路交通右行的规定与大多数驾驶员的驾驶习惯,便于驾驶员快速进出地下停车场。此外,在停车高峰时期,大多数车辆在交叉口需要排队等待信号周期,而直接在交叉口右转进、出地下停车场,能够减少商业广场吸引的交通量对于周围市政道路的影响,最大限度地维持市政道路交叉口与路段较高的服务水平。因此,综合商业广场外围的机动车交通组织采取顺时针的形式能够保证地下停车场周边交通的安全通畅。
1.2 内部交通组织
地下停车场的内部交通组织设计理念为逆时针组织、就近停车、各区连通、充分循环。内部逆时针组织一方面可以满足车辆在停车场外部顺时针、右进右出的交通组织形式,能够让驾驶员更加方便顺畅地以右转弯的形式与市政道路衔接,减少出入口与市政道路的冲突延误;同时也契合驾驶员在驶入坡道之后习惯性右转的停车行为。另一方面考虑到地下停车场内视线的局限性,车辆逆时针的环路交通流线能使驾驶员以左转弯的形式在地下停车场内行驶,保证了良好的视距,保障地下停车场的行车安全。
地下停车场通常停车位较多,行车空间较小,结合设计经验,通常在地下停车场内部部分区域采用单向交通的组织形式。采用单向交通,交叉口的冲突点少,并且有利于停车场内的车辆沿着行车流线寻找车位及离开停车场。
虽然单向交通有上述优点,但是单向交通有可能存在车辆还未找到车位,就必须沿着车行流线离开停车场的情况。为了保证车辆一定能在停车场内寻找到车位,在停车场内部的主要通道上应采用双向行驶,联通各个局部循环。这样车辆就能够在整个停车场内顺利找到车位,提高停车场车位的利用率[8]。因此,在设计停车场内部交通组织动线时,要遵循停车场整体单向循环,分区局部循环相结合的原则。
外围顺时针、内部逆时针以及整体单向结合局部双向循环是能够保障地下停车场安全高效运营的重要设计原则。在地下停车场规划设计时,需要根据这些指导原则,结合实际情况,综合考虑市政道路、出入口位置、内部通道等关键要素进行设计。
2 交通组织形式设计影响因素
地下停车场的规划时,需要符合《汽车库建筑设计规范》(JGJ 100—98)、《建筑工程交通设计及停车库(场)设置标准》(DG/TJ 08—7—2014)等规范的标准,并结合相关的国家标准、地方性规范标准和企业设置标准等进行设计。例如通道宽度、坡道转弯半径及净高等都有明确规定,但是对于交通组织流线,并没有量化的规定。本文结合上述设计原则与现场调查,归纳出两个影响交通流线设计的重要因素:通道功能(单行或双行交通组织)与出口处合流点数量。
2.1 通道功能
从冲突点和通达性上来看,单行流线与双行流线各有利弊。
在冲突点个数方面,单向流线的冲突点个数明显少于双向流线。n条双车道道路相交的交叉口冲突点总数为n2(n-1)(n-2)/6个。因此,在双行流线中,每个十字交叉口存在16个冲突点(见图2),每个T型交叉口存在3个冲突点。此外,许多车辆存在跨车道停车的情况,在车辆停车时会影响两个方向的车辆通行。而在单行流线中,存在冲突点个数明显少于双行流线,冲突点主要出现在中间通道,且每个交叉口的冲突点个数仅为1个。
在可通达性方面,双行流线的可通达性好于单向流线。在双向流线中,每条道路都存在双向且在交叉口可以选择各个方向,因此,车辆可以到达地下停车场内的所有角落,且不存在绕行距离。而单行流线存在从某个口进入无法到达某些区域的情况。此外,在能够到达的车位中,单向流线存在车辆绕行距离较大的问题。
综合上述单行与双行流线的优缺点分析,可认为“整体单向,局部双向循环”的设计原则是科学合理的。
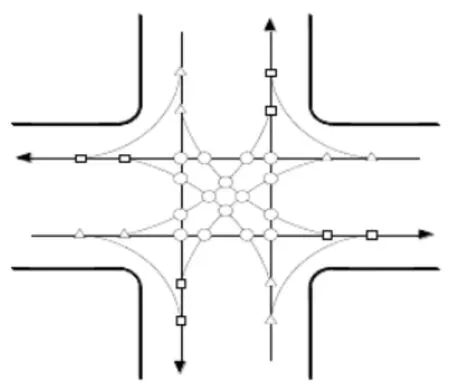
图2 十字交叉口双行冲突点示意图[7]
2.2 出口合流点数量
通过现场调查,在地下停车场高峰时期,出口处常常会因为排队离场造成的拥堵而导致周边通道的拥堵,严重时甚至会导致整个停车场的瘫痪。因此,地下停车场出口处的设计是至关重要的。出场高峰时期,车辆从地下车库的各个角落驶出,汇集到出口处排队等待离场。从各个方向来的车辆通常会三种汇聚方式,即在出口处有0个合流点,1个合流点和2个合流点。合流点是指来自不同行驶方向的车辆向同一方向、同一车流汇合的地点。合流点越多,意味着在靠近出口处会有更多方向的车辆汇入出场车流。在实际情况中,多股车流汇合,各个方向的车辆通常会出现争抢的情况,出现抢先者优先的情况。这种争抢极易发生擦碰事故,从而加重拥堵的情况。
3 交通流线设计方案仿真
为验证上述分析的合理性,采用VISSIM软件进行仿真,从定量分析和可视化的角度研究交通流线的影响因素对地下停车场停车效率的影响。
3.1 VISSIM仿真模型搭建
首先根据依托项目建立地下停车场仿真模型,整个地下停车场模型主要由车位、通道、交叉口和出入口构成。整个地下停车场的VISSIM仿真建模过程如下:
(1)车位仿真模型建立
驾驶员停车方式分为前进停车、倒退发车和倒退停车、前进发车两种,停车路径示意图如图3所示。根据现场调查情况,在地下停车场中,第二种停车方式较为普遍。

图3 两种停车方式路径示意图
由于中间路段(虚线位置)车头方向与车辆行进方向相反,因此如不经过特殊设置,车辆将沿图4箭头方向行驶,与实际倒车状态不符,会影响后续对于停车效率的评价。

图4 两种停车方式行车路径图[9]
在VISSIM软件中,路段方向改变时,如路段宽度足够,车头将与路段方向保持一致,完成转弯。而当车辆转向所需的通行空间大于现有空间时,车辆将自动倒退行驶[9]。
可根据这个原理建立单个车位仿真模型,如图5所示,单个车位模型中,包含以下三个部分:①处模拟的是车辆倒退的过程,代表路径图中的点C,将路段宽度设置为2.5 m,合理地限制车辆行驶的空间,车辆即可实现正常的倒车效果。②代表车位区域内的车辆行驶,同样将路段宽度设置为2.5 m,两向路径有所重叠,在符合现实车位大小规范要求的同时,满足VISSIM软件的停车位功能的要求。③代表前进式发车的过程,由于②中车辆方向已经调转,③只需将单个车位部分的模型与主要通道通过连接器连接,应当考虑汇合点的位置问题,不宜与车位过近,这样不符合普通轿车的车长,也不宜过远,减小出入车位与通行车辆的冲突。
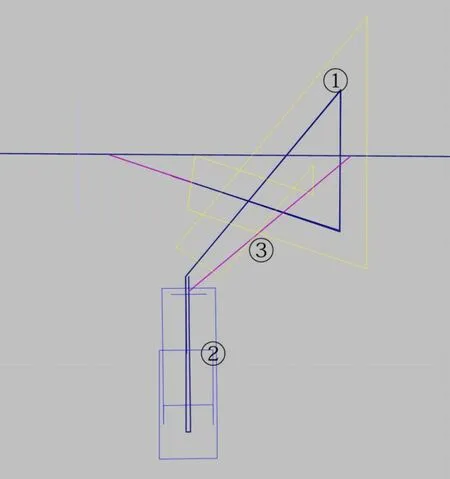
图5 单个车位建模图
单个车位模型建立完成后,进行成组车位模型的建立。成组车位模型需要在单个车位模型的基础上,进行优先规则、停车场决策的设置。由于地下停车场现有建筑结构下,通常一个柱距内会有3个车位,因此,以3对3车位为一组(见图6),采用VISSIM的复制功能,完成地下停车场车位模型的建立。
在车位模型的建立过程中,遵循停车位优先原则,保证车辆在进出车位的过程中,不会与通道上行驶的车辆及附近车位进出的车辆发生碰撞。图6中绿线所在通道有车辆时,其余车辆应在红线处等待。在前进式停车倒退式发车情况下,准备驶出停车位的车辆具有最高优先级,通道中正常直行汽车应等待驶出车辆车头摆正后,跟随它前行;欲驶入停车位前后2个车位的车辆同样应当等待驶出车辆正常行驶后停入。在倒退式停车前进式发车的情况下,准备驶入停车位的车辆具有最高优先级,通道中正常直行的汽车应等待驶入车辆进入车位区域后,继续前行;前后2个车位车辆欲驶出同样也应等待驶入车辆停好后拐出。
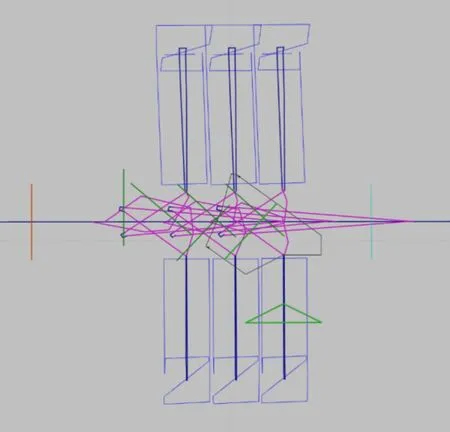
图6 一组车位建模图
(2)地下停车场布局搭建
完成车位构建后,需要添加相应的通道与出入口。在入口设置期望速度决策点,限定地下停车场内车辆的最大行驶速度。在通道与通道交汇处,即地下停车场内交叉口的位置,需要设置冲突区域让行规则。让行原则参考城市道路交叉口的让行原则:转弯让直行,右转让左转,符合让右原则(即同为直行时,让右方车辆先行)。如图7所示,期望速度决策点、路段、冲突区域、优先规则等都可在VISSIM软件左侧的路网对象中找到相应的区域进行设置。
(3)路径选择问题
路径选择根据以下逻辑进行设置:若前方的一组车位中有可停车位,优先选择该停车场路径;若前方的一组车位均被占用,则车辆沿动线继续前行,不会选择等待或回头;若正在寻泊车位的车辆到达交叉口,除车库出口通道,随机选择行驶方向;准备离开车库的车辆,直接确定路径,前往出口通道。在车辆从进入地下停车场、停车、到驶离地下停车场的过程中,涉及到出口决策、停车场决策、静态决策等路径选择问题,均可在左侧的路网对象中进行设置。其中车辆路径中包含了静态决策和停车场决策(见图8)。

图7 VISSIM路网对象设置图
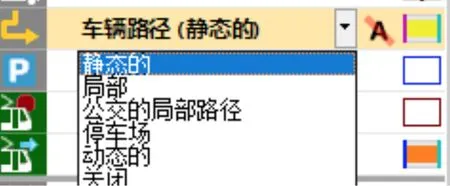
图8 VISSIM路径设置图
添加出口决策:在车辆路径(静态)中设置一对一的出口决策,起点为从每个车位出来的连接器,终点为对应的出口处。在出口处更改“目的地位置”,所有终点就显示一根线,比较美观。这样设置还可以防止车辆二次停车,在驶出车位后直接朝着出口行驶。
添加停车场决策:起点为决策停车的位置,一个起点可以对应多个停车位。
添加静态决策:在交叉口前添加静态决策,让车辆做出左转、直行或右转的决策。另外,在停车决策与车位之间添加静态决策,由于停车决策优先级高于静态决策,所以一旦车辆决定了停哪个车位,就不会再执行静态决策;而如果车辆还没有决定停哪个车位,即该停车决策对应的车位停满时,当车辆经过前面的静态决策时,车辆执行静态决策,即车辆转向其他有空余车位的通道。
经过以上设置,初步完成了VISSIM模拟仿真中地下停车场模型的搭建,效果如图9所示。该模型可以根据不同的交通流线方案进行相应的行车流线设置,为地下停车场交通流线设计影响因素的研究奠定了基础。
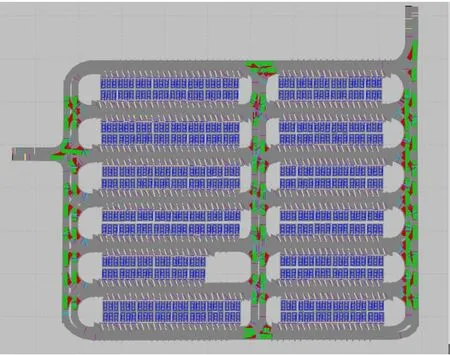
图9 VISSIM仿真效果图
3.2 地下停车场参数设置
根据相关设计规范、实际运营数据与调查资料,对地下停车场进行参数设置,如表1所示。

表1 地下停车场参数表
除此之外,还可以对车位的停车比率、停靠时间、车辆输入、仿真时长与精度等进行设置。在时间分布标签页中建立新的时间分布。在停车路径决策点标签页中设置停车时间为新建的时间分布,在该标签页中还可以设置车位的停车比率。
3.3 数据采集
设置完参数后,在入口与车位、车位与出口之间添加行程时间区段,可记录车辆自进入地下停车场到到达车位和车辆从离开车位到驶出地下停车场的行程时间和延误。在出口处设置排队长度计数器,统计出口的排队长度;设置数据采集点获取出入地下停车场的车辆数量。
为研究通道功能与出口处合流点数量对地下停车场停车效率的影响,设计了如下几个对比方案进行仿真实验。
本文单独设置了出口合流点的对比方案,来对比不同合流点下的出场效率。具体方案效果如图10所示。
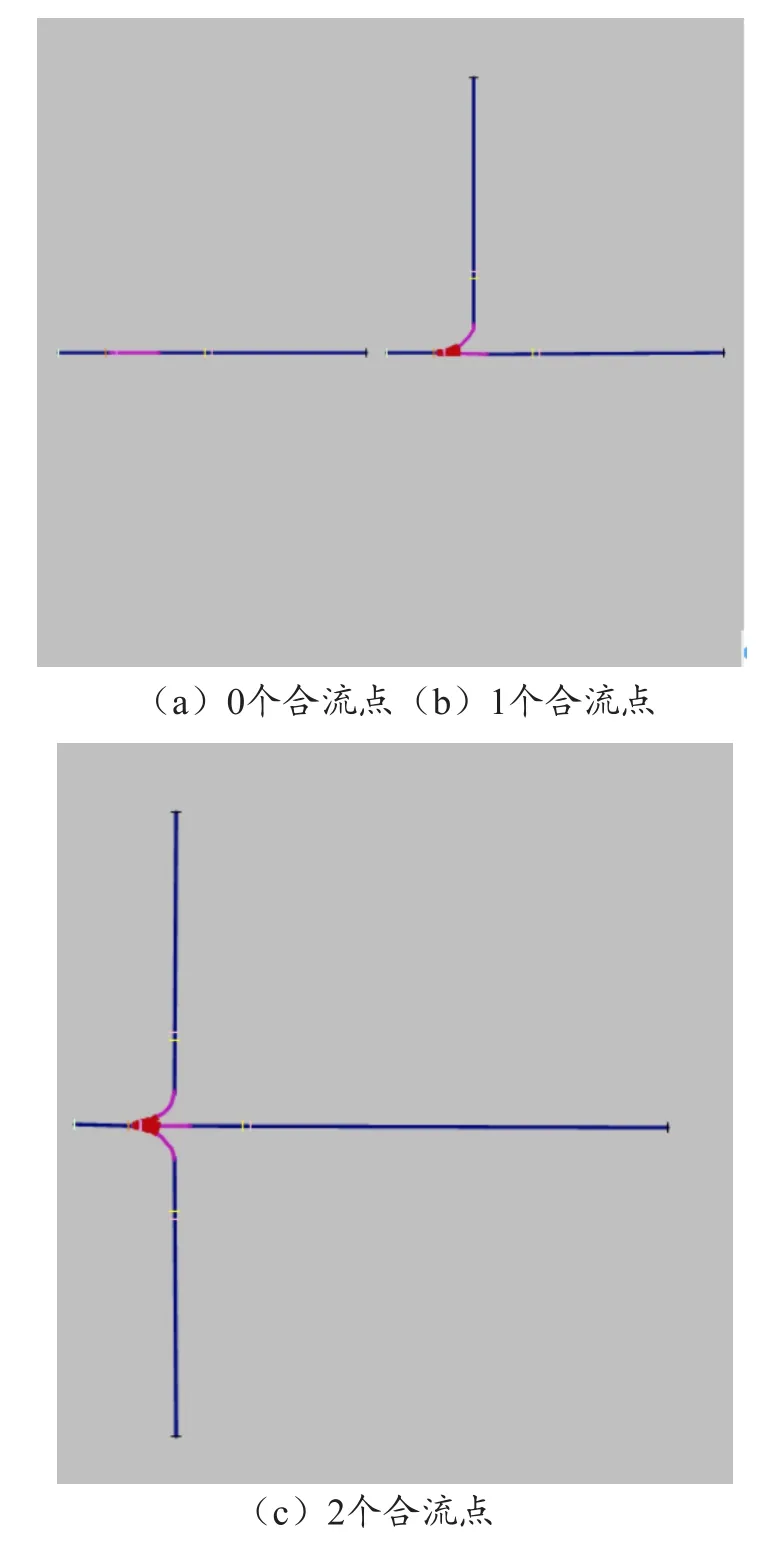
图10 不同合流点方案图
在研究通道功能时,设计了单行(全部通道单向)、双行(全部通道双向)和混行(单向通道为主,主要通道双行)三种方案,交通组织方式如图11~13所示。
3.4 停车效率分析
本文以出场高峰为评价时段 ,通过调整输入参数,实现出场车辆数达到地下停车场车位总数的60%~70%,来模拟到达地下停车场出场高峰。经过30次仿真实验,每次实验约20 min左右,截取出场高峰时期的数据对不同设计方案下的地下停车场进行评价。
(1)出口处合流点数量

图11 单行方案流线与仿真效果

图12 双行方案流线与仿真效果

图13 混行方案流线与仿真效果
在研究出口处不同合流点方案的效果中,选取车流稳定后的数据,得到车辆平均延误结果如图14所示。

图14 不同合流点平均延误时间
从图中可以看出,出口处合流点越多,出场车辆的平均延误时间越长。1合流点时的平均延误仅为0合流点平均延误的2.4倍,而2合流点时的平均延误是0合流点平均延误的7倍。这表明,合流点越多时,车流除了出场排队的延误,更多的延误是由不同方向车流合流时让行带来的。因此,在出口处,应尽量减少合流点,保证出场车辆更加高效地出场。
(2)通道功能
在研究不同通道功能对地下停车场停车效率影响的仿真实验中,对出场高峰时期的出口处最大排队长度、平均出场行程时间、平均出场延误进行了分析比较。

图15 三种交通组织形式下1号口最大排队长度

图16 三种交通组织形式下2号口最大排队长度
将1号口与2号口的最大排队长度分别绘制成箱线图观察数据结构(见图15、16),数据分布较为均匀对称,可用平均值进行进一步分析。

图17 三种交通组织方式下出口排队长度对比
单行、混行、双行交通组织时,1号口最大排队长度依次减少,2号口最大排队长度依次增加,两个口排队长度最大值的差值越来越小(见图17)。这种现象可以解释为在双行时由于车辆行驶不受流线限制,故出口排队时较为分散,故两个口分配较为均匀。
通过对多次实验数据进行观察与清洗,选用平均值来评价平均出场行程时间与平均出场延误。
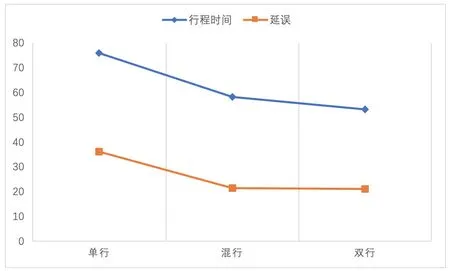
图18 平均行程时间与延误对比
由图18可见,单行时出场的平均行程时间和平均延误明显高于混行与双行。可见全部单行流线时车辆存在大量绕行的情况,地下停车场内寻泊的车辆数会偏多,互相影响的可能性就会偏大,从而导致延误也随之增大。而双行和混行相比,差异并不明显,双行时,通达性高,车辆几乎不需要绕行,所以行程时间最短,由于冲突点众多,所以延误会略高。而混行时由于主要通道可以实现区域内的连通,所以行程时间会略高于双行,而混行的冲突点较少,延误也会略小于双行。对于双行情况下,冲突点众多,延误却并没有很高的情况,本文结合仿真过程与实际情况给出下列解释:仿真模拟时,会设置优先规则,车辆也一定会按照优先规则行驶,而实际情况中,能够完全遵守让行规则的驾驶员较少,且在冲突点处,大多数驾驶员都会想优先通行,会大大增加在冲突点处发生拥堵的概率。
通过以上对于仿真数据的分析,仿真结果与交通设计原则和实际行车情况相符。结合冲突点数量、出口处合流点数目、出场行程时间、出场延误等众多因素,本文推荐在地下停车场选用“单向为主,主要通道双行”的交通组织形式。
4 结 论
本文通过总结传统地下停车场交通组织形式设计原则与影响因素,并采用VISSIM仿真进行验证,得到在现有地下停车场布局的情况下,较为合理的交通组织形式,为智能停车模式下的流线设计奠定了基础,具体结论如下:
(1)结合设计经验与现场调查情况总结了地下停车场交通流线设计原则,并通过VISSIM仿真验证了设计理念的合理性。
(2)地下停车场内采用“单向为主,主要通道双行”的交通组织形式能提高地下停车场效率。
(3)文中建立VISSIM仿真模型的过程也可用于评价不同交通组织下地下停车场的效率,可以为地下停车场交通组织设计提供数据支持。所选用的混行流线也为智能停车模式提供了合理的路线规划基础。
猜你喜欢
小型微型计算机系统(2021年12期)2021-12-08
中国交通信息化(2020年5期)2021-01-14
戏曲研究(2020年4期)2020-07-22
新丝路(下旬)(2020年4期)2020-04-23
VOGUE服饰与美容(2019年10期)2019-12-02
中国经济周刊(2018年31期)2018-08-14
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
国画家(2017年6期)2017-12-07
湖北农业科学(2017年17期)2017-10-13
农家科技中旬版(2016年8期)2016-11-02
