基于近海雷达与AIS 探测目标融合算法研究
2020-08-19 00:38邢旭峰谢仕义黄妙芬杨光照
海洋技术学报 2020年3期
邢旭峰 ,谢仕义 ,黄妙芬 ,杨光照 ,黄 山
(1.广东海洋大学,广东 湛江 524088;2. 湛江海兰寰宇海洋科技信息有限公司,广东 湛江 524088)
Radar(雷达)是无线电探测和测距装置(Radio detection and ranging)的英文缩写,它是利用自身发射电磁波和接受回波所产生的时间差来提取目标的动态信息,在船舶航海的测定船位、引航和避碰等方面中得到了广泛应用[1]。导航雷达是一种主动探测设备,其优势是不需要在海上目标上加装相应设备,就能主动对这些目标进行搜索和跟踪,但存在测量精度不高的缺点。在国际海事组织(International Maritime Organization, IMO)中有规定,船用雷达测量距离的误差不能大于所用雷达最大量程的1.5%且不能超过70 m,由此可以看出雷达提供的距离误差还是比较大。另外,当多个目标聚集在一起,雷达测量过程中可能无法做到准确的目标识别[2-4]。船舶自动识别系统(Automatic Identification System,AIS),是指一种应用于船与岸、船与船之间的海事安全与通信的新型助航系统。安装有AIS 设备的船舶能够自动向外提供自身当前的位置信息、航向、航速等动态信息,也能提供本船呼号、海上移动服务标识(Maritime Mobile Service Identities,MMSI)、船名以及IMO 编码等静态信息,AIS 提供的位置是基于GPS 的定位,所以信息精度稳定在5~30 m 之间[5-6]。其优势是在船舶密集的地方能根据MMSI 识别出目标,但如果海上目标没有安装AIS 设备或者关闭时,目标的行动就不能被跟踪。综上分析可见,在对海上目标进行探测与跟踪时,将雷达与AIS 结合使用将能发挥两者的优势。
目前,在我国近海海域活动的船舶,并不是所有都会安装AIS,海上非合作船舶(称为“三无”渔船,即无船名船号、无渔船证书、无船籍港的渔船)的占比还是比较大,增加了海上安全的管控难度,因而迫切需要对海上目标实时动态监测。目前我国采用的海洋环境监管方式多种多样,例如通过星载合成孔径雷达(Synthetic Aperture Radar,SAR)、机载SAR 和海岸雷达基地(导航雷达和高频地波雷达)进行监测。星载SAR 可大面积监测,但时间和空间分辨率有限[7-8];机载SAR 有较高的分辨率,但易受天气的影响;岸基雷达与AIS 的相互配合使用不仅弥补了星载SAR 的非实时性,而且避免了机载SAR 受环境影响的限制,为此广东省在全省近岸已布设了58 座雷达站,构成了岸基雷达网。每座雷达站由雷达传感器、AIS 接收天线和起着闭路电视监控系统(Closed Circuit Television,CCTV)作用的光电摄像设备三者构成,能对近海20 kn 海上目标实现实时动态监测[9]。
关于雷达和AIS 信息融合算法已经有不少研究[10-12],主要集中在位置融合(特征集融合)方面[13-16]。另外,关于雷达与AIS 信息融合主要集中在常规雷达和海事船舶交通管理系统(Vessel Traffic Service,VTS)等,常规雷达可跟踪的目标个数一般在100 个以内,海事VTS 雷达可跟踪的目标个数一般在500~1 000 以内,总体看运算量都不算大[17]。广东省岸基雷达网中单个雷达站能够跟踪3 000 个以上目标,且多级联网后监控的目标数可达5 万个以上,融合算法中涉及的运算量比较大。广东省岸基雷达主要针对近海20 kn 范围内的海域,在这个海域的特点是小渔船多,情况更加复杂并涉及辅助执法问题,所以高精度的轨迹融合对于取证和精准执法起着至关重要的作用。本文基于岸基雷达站的雷达传感器和AIS 接收天线获取的数据,提出一种适用于目标较密集的近海海域的AIS 与雷达目标信息的融合算法。
1 数据获取
1.1 岸基雷达站构成
岸基雷达站由雷达设备、雷达处理主机、光电摄像设备(CCTV)、AIS 接收天线等组成。其中。雷达、CCTV、AIS 天线架设于室外,雷达数据处理机和安放在室内。
雷达设备采用由意大利AIDOS 公司生产的型号为Aidos 导航雷达,其技术参数如表1 所示。该设备具有以下特点:(1)采用智能海杂波统计与抑制方法,可适用于不同海况、船型、安装高度等,方便调试和使用;(2)独立的雷达海图,可作为备份的电子海图与显示系统(Electronic Chart Display and Information System,ECDIS)使用。
AIS 采用新阳升科技生产的型号为NAR-1000的接收机,包括VHF 天线和馈线。该设备具有以下性能特点:(1)可安装在陆上,也可以安装在船上;(2)内含两个TDMA/DSC 接收机,可以在默认频道和基站控制的任何频道上工作;(3)能接收并解析所有通用船载 AIS(A 型)、其他船载 AIS(B 型)、航标 AIS 以及 AIS 基站发送的数据;(4) 符合 IEC 62287-1,IEC61108-1,IEC 60945,IEC 61162-1,ITU-R M.1371-5,ITU-R M.825-3 等国际标准。技术参数如表2 所示。
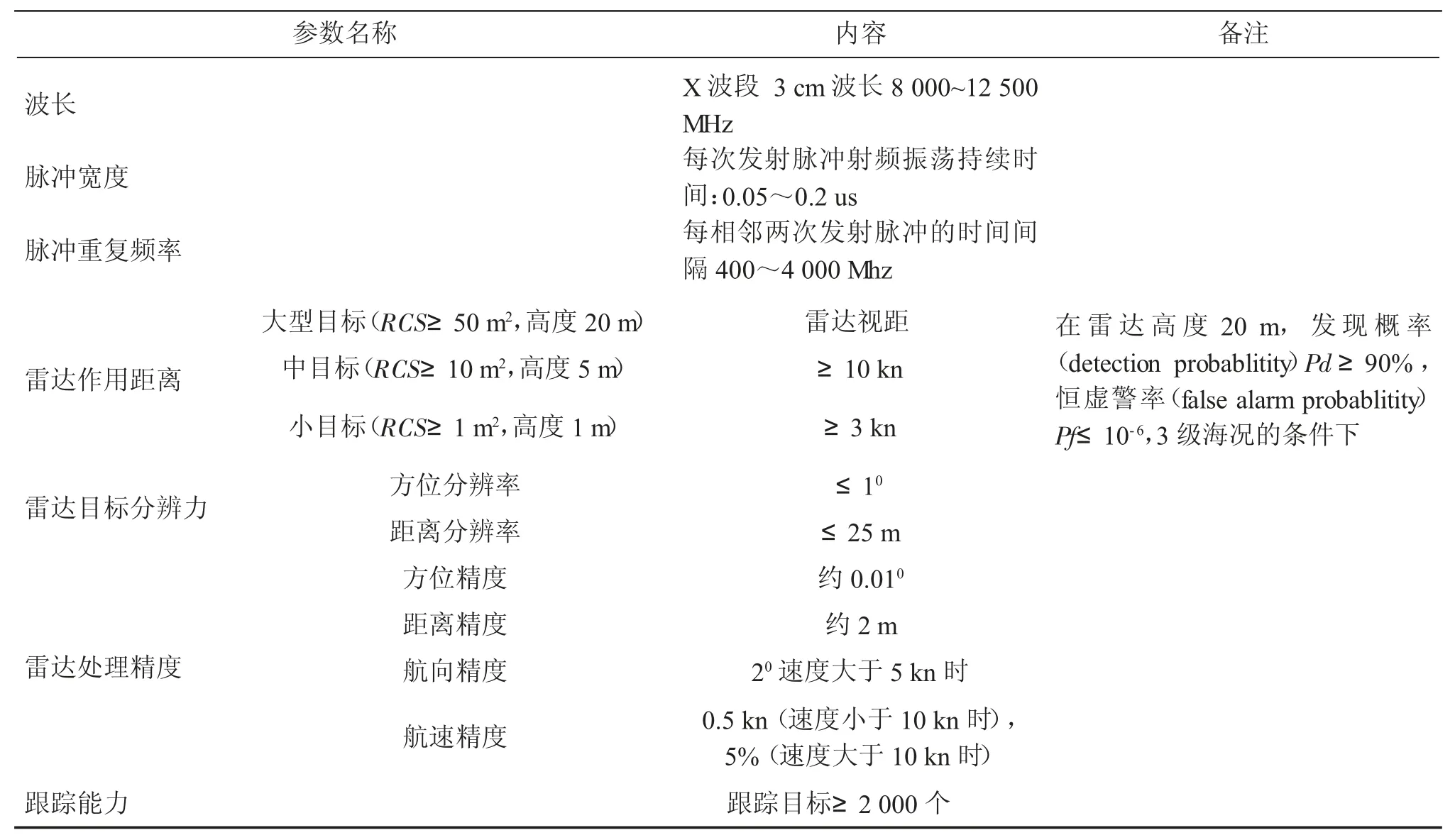
表1 Aidos 导航雷达主要技术参数*
1.2 基本数据的获取
近海雷达与AIS 信息融合的算法中主要涉及到的基本参数包括目标位置、航速、航向、大小和航迹。
1.2.1 雷达探测的目标信息 雷达的目标位置数据来源于雷达回波,是回波经过模/数转换、检测后形成的目标中心点位置数据。这些位置数据不是用经纬度来表示,而是用雷达到目标的距离RT和雷达到目标连线与水平线之间的夹角θt来表示,因而是一种相对的位置信息。
导航雷达所发射的电磁波在空间是直线传播的,遇到目标时会反射回来。将雷达测量的发射脉冲与回波脉冲之间的时间差tr,代入式(1)即可计算得到雷达到目标的测量距离RT。

式中:RT为雷达与目标的距离,m;C为电磁波在空间的传播速度3×108m/s;tr为电磁波往返于天线与目标之间的时间,s,即发射脉冲与回波脉冲之间的时间差[2]。
雷达数据处理输出的目标航速与航向不是由配套的传感器确定的,而是通过雷达目标自动跟踪处理中的航迹外推、航迹相关等形成的目标航迹线计算出来的,由于与目标的历史位置数据有关,所以存在一定的“滞后”,但由于船速比较慢,所以这种滞后对船舶航速的确定精度影响不会很大。
雷达数据处理输出的目标长度是通过对目标标绘计算得出。在岸基雷达站中,会给出估算的目标长度,同时还会给出该目标估算的最小长度和最大长度。由于根据雷达探测的长度数据误差比较大,因为在进行融合时不做目标长度判断。
1.2.2 AIS 探测的目标信息 安装在船舶上的AIS系统所提供的位置信息是基于WGS 84(World Geodetic System,1984)坐标系,该信息是为全球定位系统(Global Position System,GPS)的使用而建立的坐标系统。在AIS 系统中目标物T 的位置用经度J、纬度 φ 和海拔高度H,即(J,φ,H)来表示,是一种绝对的位置信息[2]。
在AIS 系统,海上目标的航速和航向等航迹信息分别是通过配套安装的电罗经(航向)和计程仪(航速)等设备来辅助确定的,而船舶尺寸(船长、船宽)和GPS 天线相对于船舶的位置等信息都是通过人工置入的船舶实际数据。
2 雷达与AIS 位置信息融合算法
2.1 预处理
预处理过程主要包括对AIS 探测目标以及雷达探测目标进行时空统一。
2.1.1 空间配准 由于雷达系统和AIS 系统分别都能同时探测多个目标,且这两种系统所输出的位置信息所基于的坐标系是不同的,因此,在进行数据融合时,首先要做的工作就是进行空间配准,把两者都变换到同一个坐标系统中来。
雷达获取的位置信息是基于雷达站心坐标系统,AIS 获取的位置信息是基于WGS 84 坐标,需要将两者的坐标统一。目前关于雷达与AIS 信息融合结果,主要是借助雷达系统进行显示,因而常规的做法是将AIS 的WGS 84 坐标转换为雷达站心坐标。而岸基雷达系统中AIS 与雷达目标融合后的信息最终数据是显示在基于WGS 84 坐标系的海图上,因而本文采用的办法是将雷达站心坐标转换为WGS 84 坐标[18]。
在安装雷达站时,会用GPS 给出雷达站所在位置的大地坐标,并输入到系统中。假设某个雷达站位置的大地坐标用(λ0, φ0)表示,雷达探测目标的距离用Rt表示,雷达到目标连线与水平线之间的夹角用θt表示。已知本初子午线约为40 075 km,所以在相同经度上的纬度每间隔一度距离相差111.3 km,而在相同纬度上的精度每间隔一度相差111.3 km×cos(φ0) km。首先根据式(2)和式(3)可分别计算两点在同一经度上的纬度距离差φd(km)和在同一纬度上的经度距离差λd(km)。

然后再根据式(4)和式(5)计算经、纬度的偏移量 λda和 φda(km)

最后将偏移量 λda和 φda代入式(6)和式(7)就可计算出目标所在位置的经纬度(λ,φ),完成将雷达系统的目标坐标转换成WGS 84 的经纬度格式。

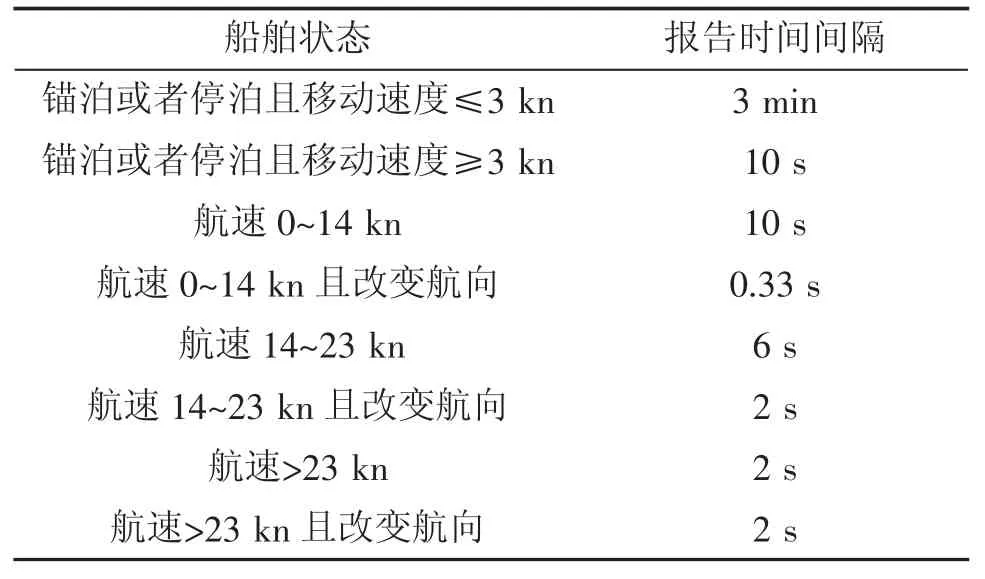
表3 自主模式下AIS 信息更新率
2.1.2 时间统一 雷达目标航迹的更新取决于雷达的天线空间扫描周期,Aidso 导航雷达扫描一圈需要2 s,也就是说,雷达目标航迹更新速度是2 s,而且整个工作过程中都是恒转速的。AIS 航迹更新时间不是固定的,取决于船舶的运动状态,在自主模式下其更新率为2 s~10 min,如表 3 所示[19]。需要说明的是,由于AIS 发送信息需要耗能,所以在一些情况下,船主会自己设置更新率,那么该船舶信息更新率就不遵循表3 的约定了。
显然,雷达和AIS 二者获取的同一目标的动态信息更新率不是同步的,所以必须对两者的时间进行统一。
假设:(1)雷达所探测时间为t,AIS 采用间隔为T;(2)AIS 在第nT和第(n+1)T时刻有与雷达对应时间段的探测值,且nT< t <(n+1)T;(3)AIS 在nT时刻的采样值为Xn,在(n+1)T时刻的采样值为Xn+1,在 t 时刻的值为Xt,根据式(8)可求出Xt。

根据式(8)将AIS 的数据外推到雷达的探测时刻t上,完成了时间上的匹配。由于船舶的机动比较平缓,采用两点外推能够满足精度要求。岸基雷达站主要观测近海25 kn 的海上目标,在这个海域内船舶的速度一般都在0~14 kn 之间,由表3 可见,船舶自动模式下的时间报告间隔为10 s。考虑到实际情况下,10 s 船舶的变化轨迹不会很明显,因而在进行时间统一时取1 min 的时间间隔。
2.2 目标融合算法
对于近海区域,由于海洋经济活动的需求,因而船舶的密度比较大。为了减少融合的工作量和提高效率,可先对探测范围内的区域进行分块处理,因为特定的船舶信息只能与它周围一定范围内的船舶信息有关联,所以没有必要将整个水域的船舶信息进行关联处理,这就需要进行距离粗关联判断[20]。在一些情况下,在短时间内,虽然两个目标的距离在给定的阈值范围内,但两者的速度不同,应该确定为两个独立的目标。为此,提出的岸基雷达站目标融合算法是基于以下方面的参数:(1)目标位置相关性;(2)目标运动特性相关性;(3)目标历史轨迹相关性。如果以上参数中的任何一个不相关,目标不会进行融合。具体融合流程如图1 所示。
图1 所采用的是经过时空配准的数据集,图中的limit-i(i=1,2)表示针对不同参数所设置的阈值。分析图1 可以看出整个具体流程主要分为3 个步骤,包括目标位置、速度和航迹关联等。
首先,进行目标位置判断。在某一时刻t,AIS 探测的目标和雷达探测的目标的位置欧氏距离用η1(t)表示,则有

式中:η1(t)为目标位置的欧氏距离,λi(t)、λj(t)、φi(t)、φj(t)分别为在t时刻通过AIS 和雷达探测的目标的所在的经度和纬度值。本文设定两者位置的最小纬度偏差为0.000 1°,最小精度偏差值0.000 1°,则阈值 limit-1 可设定为 15 m。当 η1(t)<=limit-1 时,则转入下一步进行航速判断;否则,则认为是两个不同的目标,不进行融合。
其次,进行速度的判断。假设AIS 探测的目标航速用Vi表示,雷达探测的目标航速用Vj表示,航速的欧氏距离η2(t)可用式(10)求出:

根据经验,可设定阈值limit-2=0.2 kn。因此当η2(t) <=limit-2 时,则转入下一步进行目标大小的判断;否则,则认为是两个不同的目标,不进行融合。
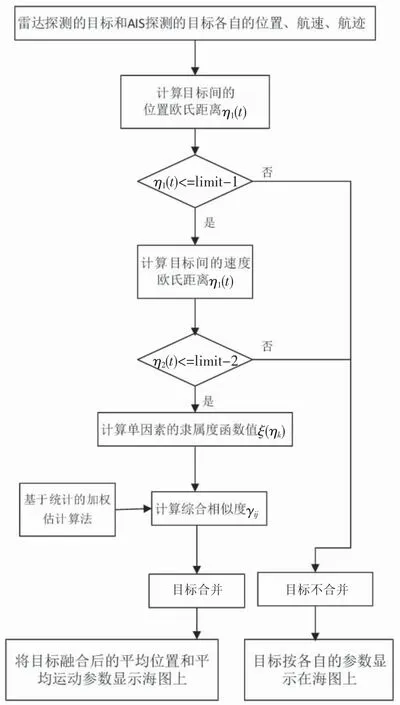
图1 目标融合流程图
最后进行航迹关联的判断。航迹关联的实质就是判断AIS 和雷达分别探测的两条航迹是否来自同一个目标。关于航迹的判断方法很多,归纳起来主要有基于统计和基于模糊数学两大类方法[21-22]。考虑到雷达和AIS 在实际探测中有很多不确定因素,直接干扰了两者目标间的对应关系,因此本文采用模糊数学的方法来实现航迹的关联[23]。应用模糊数学方法进行航迹关联时最关键的步骤是隶属度函数ξ(ηk)的确定,本研究采用柯西型隶属度函数表达式,如式(11)所示。
式中:ηk(t)和σk(t)分别为模糊因素集中的第k个因素的欧氏距离和展度。本研究中模糊因素集主要选取船位和航速,因而ηk(t)分别由式(9)和式(10)计算所得。模糊因子的展度与航迹的误差分布有关,故取各因素欧氏距离的均方根值来作为每个模糊因素的展度,如式(12)所示。

将式(9)、式(10)和式(12)代入式(11)就可计算出各个模糊单因素的柯西型隶属度函数值,然后利用加权的方法计算综合相似度γij,对于来自AIS探测的目标1 的m条航迹和来自雷达探测的目标2 的n条航迹,γij的计算公式如下。

式中:αk为单因素的权重值。根据实际经验,α1取值 0.60,α2取值 0.4,用 γij的最大值确定航迹的相关性,最后将两者的平均位置和平均运动参数作为融合后的目标参数在海图上显示出来。
2.3 融合效果分析
2.3.1 显示特征描述 广东省岸基雷达站的终端显示软件(GeoViewer)是整个雷达系统操作的核心界面,采用在海图上叠加显示雷达目标、AIS 目标、目标矢量速度、雷达回波视频等信息层的方式,且所有目标信息仅显示矢量航向、航速及运行轨迹;另外航速显示比例、航行轨迹时间均可调,如图2所示。
图3 中为不同目标的显示,用不同的符号表示以便区别开。三角符号为A 目标(安装了AIS 的渔船),小三角符号并图红色的为B 目标(安装了AIS的的商船和货船),符号中间有圆圈的为融合目标,仅圆圈的为雷达目标(无AIS)。图中浅蓝色为丢失目标的特殊显示。
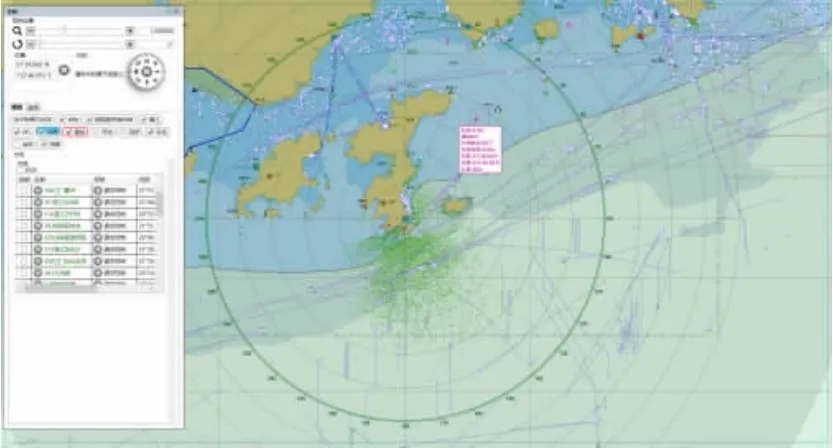
图2 海图叠加显示

图3 目标显示符号
将鼠标移动到某个目标上,点击右键会显示出该目标的基本信息,包括名称、MMSI、航向、航速、位置和长度等信息,如果仅雷达探测到的目标,其信息中名称用雷达赋予的目标编号替代,MMSI 为零。图4 为AIS 和雷达融合后的目标信息显示,图5 为仅雷达探测到的目标信息显示。
2.3.2 精度分析 利用2019 年7 月到2019 年12月广东省岸基雷达网跟踪的目标数据,对融合效果的精度进行了分析。分别在湛江和珠海海域选取了登记在册的装有AIS 数据的渔船各10 艘。每个月选择2 个时段,每次跟踪2 小时。湛江海域选择的是湾内的数据,海况相对平静一些,珠海选择的是外海的数据,海况相对复杂一些,因而AIS 和雷达探测目标数据返回的目标信息,受到海况的影响比较大。
表4 为对所有跟踪船舶的效果统计表,表中的数字为在2 个小时内能精确融合的目标数。分析表中的数字可以看到采用本算法融合后的精度还是比较高,湛江海域平均精度可以达到91%,珠海海域可达89%。
图6 为其中9 艘船的融合效果图,当天的海况为1 级,相对比较平稳。从图6 中船舶的轨迹可以看出,在海况较好的情况下,融合效果比较好。

图4 AIS 和雷达融合后的目标信息
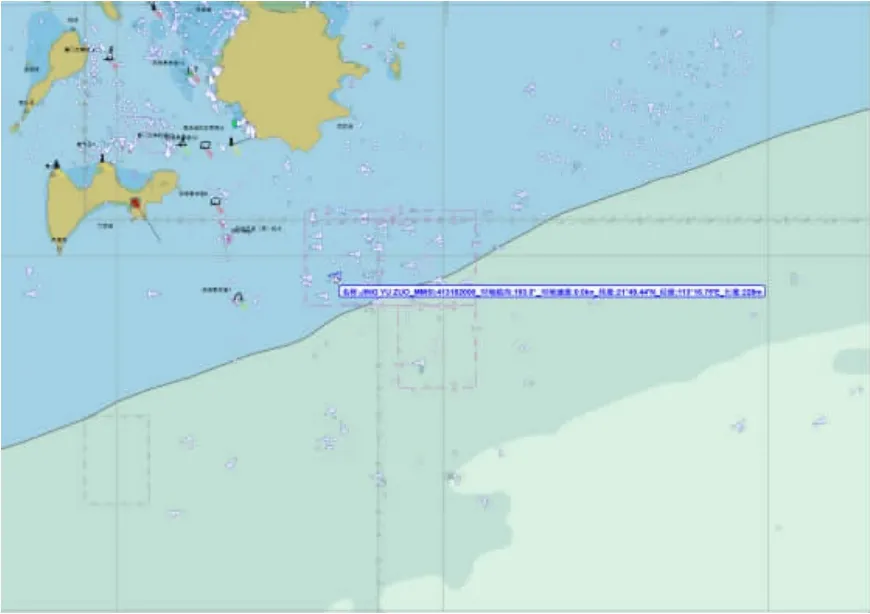
图5 仅雷达探测到的目标信息
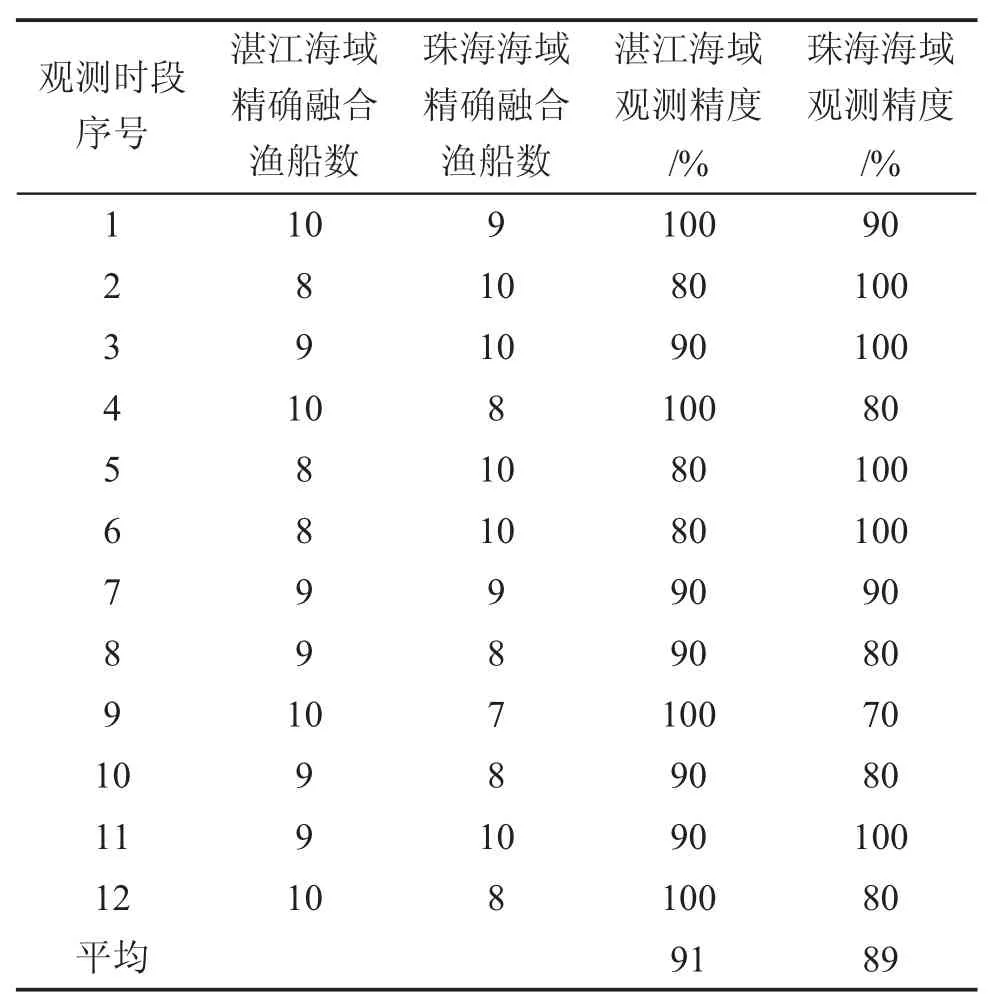
表4 跟踪船舶的效果统计
3 结论
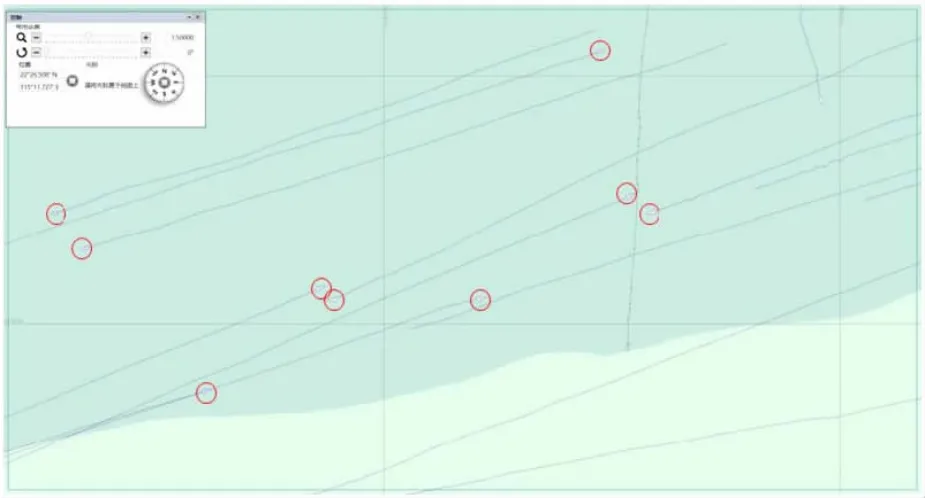
图6 9 艘船融合效果轨迹图
将雷达与AIS 各自探测的目标数据进行融合,可以提高近岸雷达系统对目标的跟踪与探测能力,并可为进一步实现对运动目标状态的分析与预测提供基础数据。本文根据岸基雷达站探测的目标数据,建立了一种针对近海海域目标信息量的融合算法,该算法首先经过目标位置相关性和目标运动特性相关性的判断,剔除了一大批数据,使得最后参加轨迹关联的数据量大大减少,提高了融合的时间效率。通过对融合效果的分析表明,本算法的精度可以满足要求,适用于推广到近海海域岸基雷达站数据融合系统中使用。
2018 年7 月1 日开始,自然资源部将对各类国土资源空间数据全部采用2000 国家大地坐标系,但目前海图仍以WGS 84 坐标为主,另外将WGS 84 坐标转成2000 国家大地坐标涉及一系列参数问题,对这些参数的直接获取有一定难度。如果通过间接方法推算的话,那么需要进行选择重合点和精度验证等一系列的严格步骤,工作量比较大。为了使得本文的研究成果能更好的服务于社会,下一步工作将进行本文系统中WGS 84 坐标向2000 国家大地坐标的转换工作。
猜你喜欢
铁道通信信号(2020年6期)2020-09-21
现代电子技术(2019年1期)2019-01-10
雷达学报(2017年3期)2018-01-19
大陆桥视野·下(2017年5期)2017-06-19
北京航空航天大学学报(2017年12期)2017-04-23
弹箭与制导学报(2015年1期)2015-03-11
IT经理世界(2014年10期)2014-05-29
上海航天(2014年6期)2014-01-09
中国信息化·学术版(2013年5期)2013-10-09
小哥白尼·趣味科学画报(2006年1期)2006-02-15