多圆柱体浮标的横摇性能分析
2020-08-19 00:38:56魏晓辉尼建军李宏武
海洋技术学报 2020年3期
魏晓辉 ,尼建军 ,李宏武 ,刘 宁 *,董 涛
(1. 国家海洋技术中心,天津 300112; 2. 海军装备部驻天津地区第一军事代表室,天津 300131)
波浪测量浮标是观测和收集海浪数据的重要手段之一,在海洋事业各个领域应用广泛[1]。但对于研究一些极端海况,人为投放浮标会极大地增加作业的危险性,因此,利用无人机运输投放浮标,不仅可以减小作业的危险性,还可以快速到达目标海域进行海浪测量。为了适应无人机吊舱的外形,需要设计一种投弃式圆柱体浮标,同时浮标要有较小的横摇角度,降低天线束宽的要求,提高天线增益,增加系统的通信质量[2-3]。
目前,无论基于加速度传感器还是GPS,目前波浪测量浮标大多为球体浮标,直径约为0.5~1.0 m,如表1 所示。虽然球体浮标拥有较好的横摇性,但无法被无人机搭载,而细长形的圆柱浮标则有较差的横摇性能,容易在恶劣海况下被海浪打翻,因此空投波浪测量浮标需要在保持圆柱体的前提下,增强其横摇性能。本文通过分析不同直径和径高比圆柱体浮标的横摇性能,设计了一种多圆柱体的浮标,该浮标中的较大直径的圆柱可以折叠,减小浮标整体径向长度,以适应无人机的吊舱。
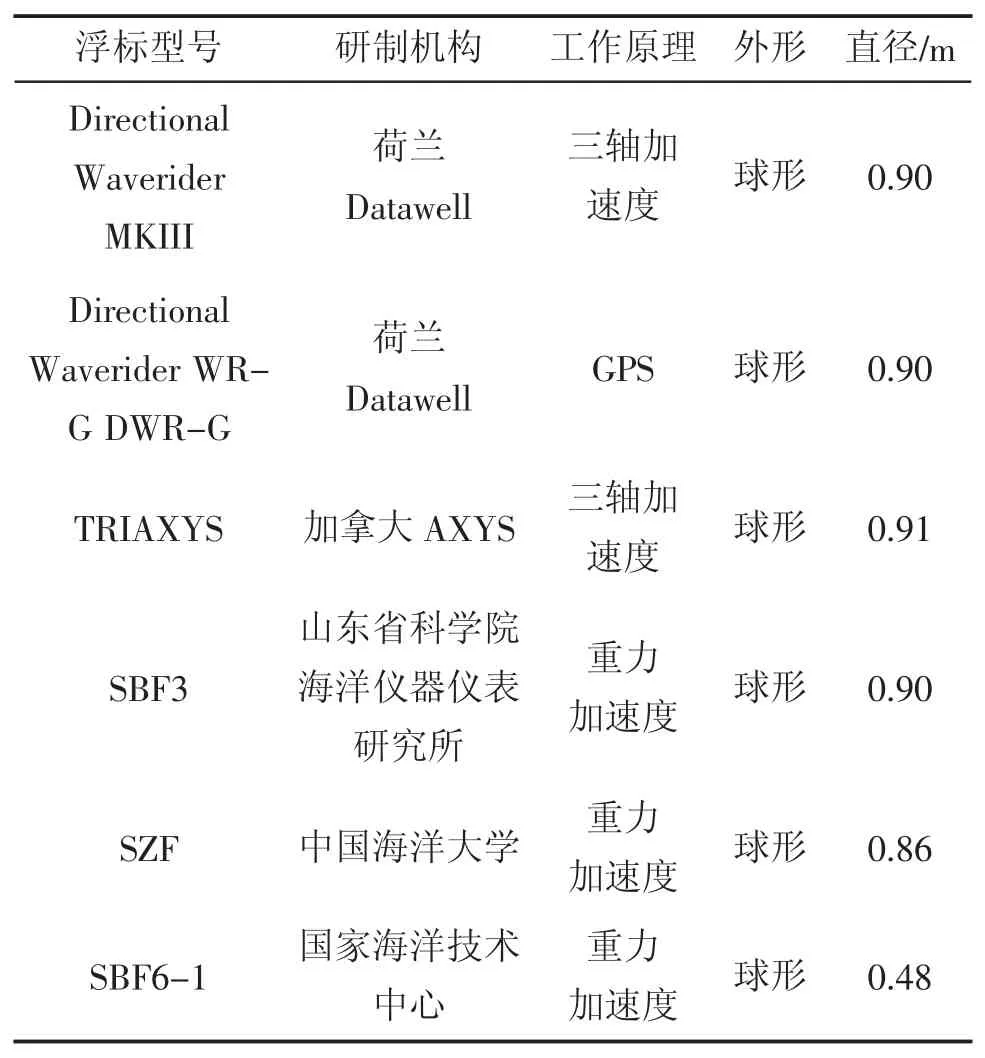
表1 国内外波浪测量浮标工作原理及外形[4-7]
1 浮标的横摇运动理论
1.1 浮标的横摇周期
浮标在静水中作横摇运动的固有圆频率ωφ为[8]:

式中:m为浮标的质量;g为重力加速度;h为初稳心高;Jφ为转动惯量。转动惯量Jφ包括整个浮标绕水线面的中心轴的转动惯量J和附加质量引起的转动惯量J'。实际情况中,横摇阻尼很小,对横摇固有圆频率的影响可以忽略,故式(1)中未考虑阻尼,由此可知,浮标的固有圆频率仅与浮标的质量、初稳心高和转动惯量有关。
在横倾角dφ 不大时,浮心的运动轨迹可以看作是以初稳心为圆心,做小角度的圆轨运行,同时,稳心的位置可以近似看作不变。因此,浮标的恢复力矩为:

式中:h为初稳心高;a为重心和浮心的距离,即a=│Zg-Zb│;Vw为排出水的体积;ρw为海水的密度。
当浮标倾斜且倾角不大时,可看作浮标竖直水线倾斜,此时,产生浮力为楔形体积的排水量,浮心的改变也是由楔形体积排水量不对称所引起的,因而可以求得浮标恢复力矩的另一种形式[9]:
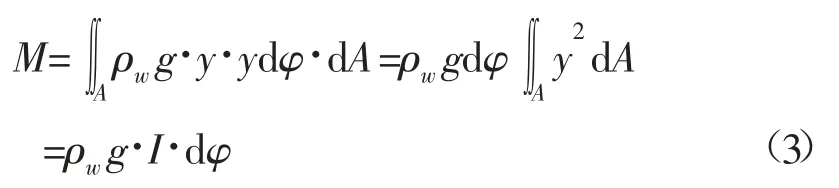
式中:dA为楔形体积水线面A上的微元面积;y为微元面积至水线面上转动中心线的距离;I为水线面对于转动中心线的惯性矩;g为重力加速度。式(1)与式(2)联立可得:

因此,浮标的初稳心高为:

根据实践经验,浮标的总转动惯量可以通过杜埃尔公式估算,浮标的转动惯量为[10-11]:

式中:D为浮标排水量;B为浮标的直径;zg为浮标重心到基线的高度。当初稳心高h>0.15 m 时,浮标的固有周期为:
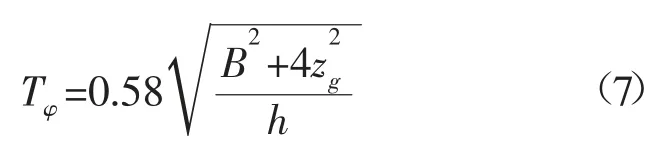
当时,浮标的固有周期为:

式中:φmax为最大横摇角;r为横稳心半径。
当 0.05<h<0.15 时,浮标的固有周期为式(7)和式(8)计算结果的平均值。
1.2 浮标在规则波中的横摇运动
浮标在规则波中的横摇运动如图1 所示。
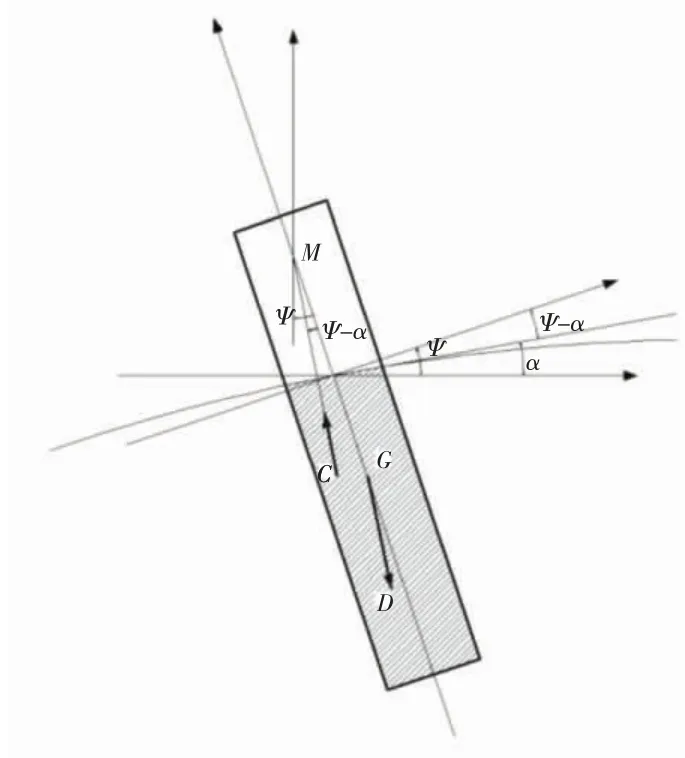
图1 浮标在规则波中的横摇
根据横摇经典理论[12],在无阻尼状态下,浮标的横摇方程为:

式中:α0为波浪的倾角的幅值;ωα为波浪的圆频率;ε0为波浪角与浮标倾角的初相位差。假设初始条件则式(9)的解为:

式中:Tφ和Tα分别为浮标横摇的固有周期和波浪的周期。
引入横摇的放大因子K=φmax/α0,则K可表示为:

2 圆柱体浮标与球体浮标横摇性能分析
2.1 圆柱体浮标横摇性能分析
假设圆柱体浮标的直径为d,高度为hc,则径高比k=d/hc,密度为750 kg/m3,重心位于浮标的0.25hc处,故重心至水线面的距离zg=0.5hc,浮心至水线面的距离zb=0.385hc。因此,圆柱体浮标的初稳心高为:
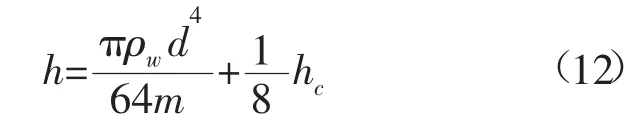
将式(12)代入式(7)可得圆柱体浮标的固有周期为:
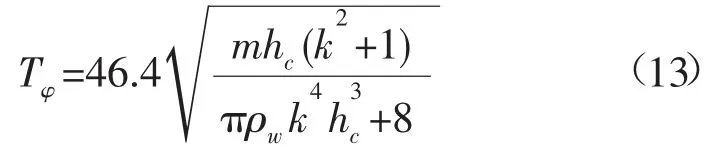
设定波浪的周期Tα=4s,则放大因子K为:
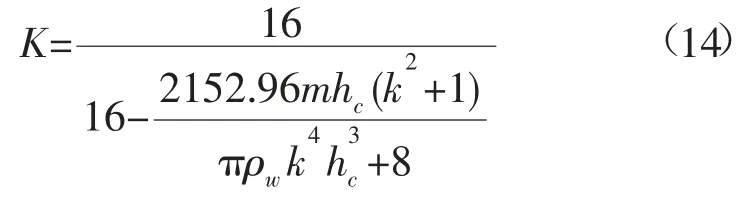
由式(14)可知,在浮标质量确定的情况下,圆柱体浮标的横摇性能仅与高度和径高比有关。分别计算当hc=0.5 m,0.15 m,0.25 m,0.35 m,0.45 m,0.55 m,0.65 m,0.75 m 时,k从 0 到 10 的放大因子,计算结果如图2 所示。
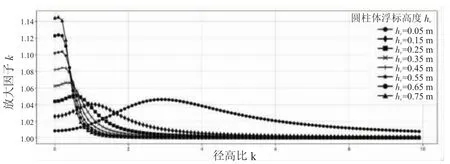
图2 不同高度的圆柱体浮标横摇性能随径高比的变化
由图2 可知,随着径高比增大,圆柱体浮标横摇运动的放大因子先增大后减小,最终趋向于1,即随波漂流;而随着直径的增大,放大因子的峰值变大,并向左移动。当浮标高度大于0.25 m 时,放大因子在径高比为4 处就已达到平稳状态,因此,在设计圆柱形浮标时,尽量选择较高径高比,避开峰值区域。
2.2 球体浮标横摇性能分析
假设球体浮标的直径为d,密度为750 kg/m3,重心位于浮标的0.25d处,故重心至水线面的距离zg=0.403d,浮心至水线面的距离zb=0.25d。因此,圆柱体浮标的初稳心高为:

通过式(7)、式(11)和式(15),可以计算得到球形浮标的放大因子随直径的变化趋势,设定波浪周期Tα=4 s,计算结果如图 3 所示。

图3 球体浮标横摇性能随直径的变化
由图3 可见,球体浮标的放大因子均低于1.03,横摇性能优良。对于目前的大部分球体波浪测量浮标,直径约为0.5~1.0 m,既保证体积不会很大,又有良好的横摇性能,如果直径继续增大,放大因子减小不明显,横摇性能并不会明显提高。
3 多圆柱体浮标横摇性能分析
由于无人机吊舱的尺寸限制,用于空投的波浪测量浮标的直径要求小于0.124 m,通过图2 可知,只有径高比大于4 时,才有较好的横摇性能,即高度只有0.03 m,实际上是不可行的。因此,需要设计一个径向可折叠的圆柱体,投放后展开以增大浮标的径高比,如图4 所示。底部圆柱体的直径为0.09 m,径高比为0.18,上部圆柱体直径为0.9 m,径高比为30,通过布置内部配重模块,使水线面位于上部圆柱体的底面偏上0.01 m 处的位置,重心位于下部圆柱体。

图4 多圆柱体浮标结构示意图
海浪被视为为一种随机过程,在风和地形的影响下,海浪的变化是极其复杂的,经典的线性理论无法阐明其特征,故采用频谱对海浪进行描述和预测。在各种海浪频谱中,常用的由Pierson-Moscowitz(P-M)谱和JONSWAP 谱。其中P-M 谱是将北大西洋上已观察的54 个充分成长的海浪,按照风速分为5 组,就各组的谱求一平均谱,然后将这些谱无因次化,并以不同形式的无因次谱进行拟合,最后得到的有因次谱[13]:

式中:无因次常数 α=8.10×10-3;β=0.74;U为海面上19.5 m 高度处的风速。各级海况的平均风速、平均波高和周期如表2 所示[14]。
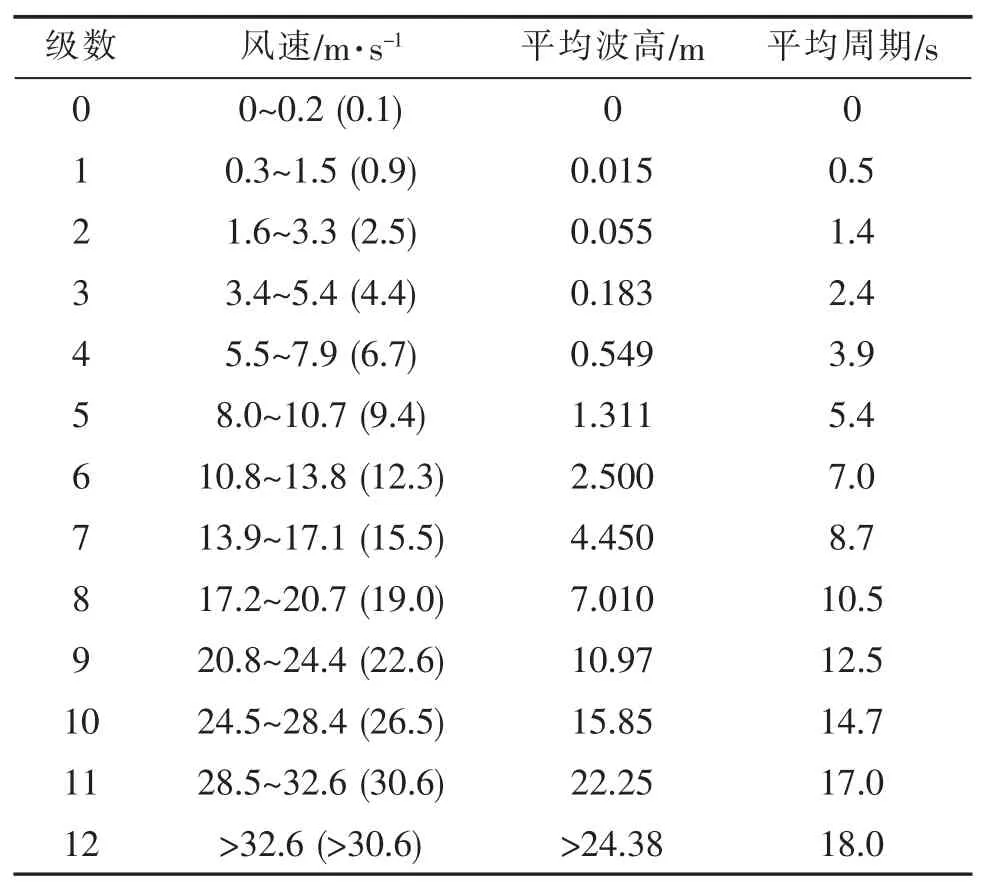
表2 海况等级
为了能够分析实海况条件下多圆柱体浮标的横摇性能,选择表2 中5 级海况下的风速,并假定海水是无旋、无粘的。浮标的横摇运动计算结果,如图5所示。利用Python 绘制浮标的横摇角度随时间的变化图[15],结果如图 6 所示。
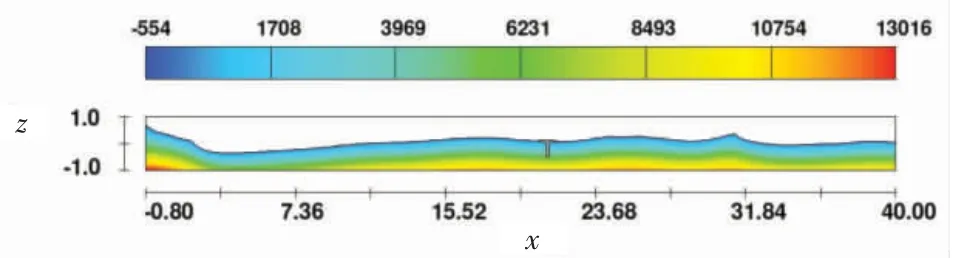
图5 多圆柱体横摇运动仿真

图6 多圆柱体浮标的横摇角度
由图6 可知,在5 级海况下,依据图2 设计的多圆柱体浮标的最大横摇角度小于20°,小于设计要求的30°,说明该形状浮标的横摇性能良好。
4 多圆柱体空投浮标设计与试验
浮标主体结构(下层圆柱体)采用厚度为2 mm的3A21 铝合金圆筒,根据经验这种结构可以满足安全入水的要求,另外3A21 铝合金既可以焊接,也有较好的抗腐蚀性能,还不具有磁性,同时,它的密度比不锈钢、钛合金等材料低。减速板(上层圆柱体)径高比45,是由8 根主梁和544 航空伞布制成,其中主梁是由玻璃微珠复合材料加工制成,密度仅为500 kg/m3,能够极大地增加浮标的储备浮力,提高稳定性。浮标顶部采用ABS 塑料制成,以确保对卫星通讯没有电磁屏蔽,便于数据接收和发送。浮标总长0.887 m,减速板闭合状态时最大直径为0.124 m,展开状态时最大直径为0.89 m,符合无人机搭载要求。
浮标由4 部分组成,从上到下依次为:天线舱、电路模块舱、电池舱和减速板及其启动装置模块。天线舱内部装有北斗卫星天线、陀螺仪、加速度传感器、数据处理电路和北斗天线电路装于电路模块舱,电池舱与电路模块舱通过转接环连接,电池舱的下部是减速板的启动模块,内置304 不锈钢配重块,可根据使用环境配重块的质量,从而改变浮标的重心位置,减速板覆盖于电路模块舱和电池舱表面,如图7 所示。浮标的每个模块舱均为独立结构,通过螺纹与拉杆连接,浮标体表面无螺钉,防止储存和工作过程中发生电化学腐蚀。
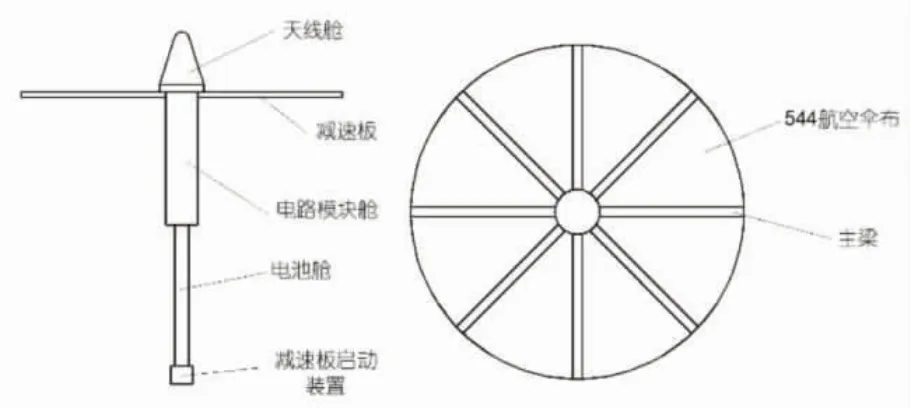
图7 浮标总体布置及外形
为了测试多圆柱体浮标在真实海况中的工作情况,验证浮标的横摇性能在不规则波中是否符合要求,在青岛附近海域进行海上试验,选取海浪较大的区域投放,同时在附近投放国家海洋技术中心研制的SBF7-1 型波浪浮标,记录此区域的波浪参数。
SBF7-1 型波浪浮标为球形锚定式浮标,而空投浮标为投弃式浮标,因此放置SBF7-1 型波浪浮标后,在其3 km 内投放空投浮标,并保持100 m 左右的距离跟随浮标,防止漂远。空投浮标和SBF7-1型波浪浮标的海上漂浮状态分别如图8 和图9 所示。

图8 空投波浪测量浮标漂浮状态

图9 SBF7-1 型波浪浮标漂浮状态
SBF7-1 型波浪浮标测量得试验过程中海浪的有效波高为1.1 m,接近5 级海况。空投浮标的横摇角度通过内置的陀螺仪收集,由于浮标在随机海浪中存在旋转运动,故不规定浮标横摇的方向,计算在各个方向浮标轴线与垂线之间的夹角,记为浮标的倾角,如图10 所示。
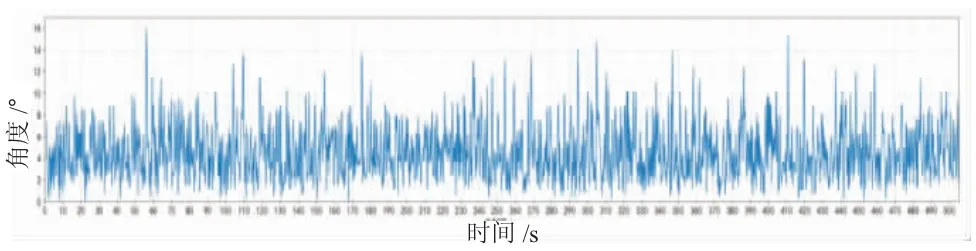
图10 空投波浪测量浮标漂浮状态
由图10 可知,浮标的横摇倾角最大约为16°,与计算模拟结果相似,说明多圆柱体浮标具有较好的横摇性能。
5 结论
本文阐述了浮标横摇运动理论,在此基础上分析圆柱体浮标和球体浮标横摇性能与特征尺寸的关系,根据分析结果设计一种能够被无人机搭载的多圆柱体浮标,计算了该浮标在5 级海况下的横摇角度,数值模拟结果符合设计要求。另外,本文还介绍了空投浮标的布局与结构,完成了海上试验,结果表明浮标在有效波高为1.1 m 的海浪中的横摇倾角最大约为16°。结合计算结果得到以下结论:
(1)圆柱体浮标的横摇特性随径高比增大而先增大后减小,球体浮标的横摇特性随直径的增大而先增大后减小,分析结果能够为浮标外形和尺度的确定提供依据,为浮标的设计提供理论基础。
(2)采用多圆柱体结构设计可以弥补圆柱体浮标横摇性能差的缺点,但要求上部圆柱体的径高比较大。
(3)多圆柱体浮标在5 级海况下的横摇角度小于30°,能够保证较高的卫星通讯质量。
猜你喜欢
装备制造技术(2020年3期)2020-12-25 05:22:08
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
现代传输(2016年3期)2017-01-15 14:23:03
现代传输(2016年2期)2016-12-01 06:42:46
新农业(2016年5期)2016-05-23 03:14:59
船海工程(2015年4期)2016-01-05 15:53:38
应用海洋学学报(2015年3期)2015-11-22 07:39:14
舰船科学技术(2015年8期)2015-02-27 15:38:44
振动、测试与诊断(2014年4期)2014-03-01 01:14:01