水下便携式可应答同步编码声源系统研究
2020-08-19 00:38张庆国李兴武
海洋技术学报 2020年3期
张庆国,李兴武,沈 雁,连 莉
(昆明船舶设备研究试验中心,云南 昆明 650051)
随着世界各国对海洋资源的大力开发[1-2],以及海防军事需求的不断提升[3],直接推动了多种不同用途水下航行体或水下设备的研制,从而加快了水下航行体相关技术的快速发展。如传统的UUV(Unmanned Underwater Vehicle)、AUV(Autonomous Underwater Vehicle)、ROV(Remote Operated Vehicle),以及不断扩展的水下无人系统、水下滑翔机等,甚至可利用上述各种水下设备组建更高复杂度的水下无人作战体系[4]。
无论是在水下航行体(或称“水下平台”)的研制过程中,还是实际水下作业时,均需对平台的当前位置信息、航行状态等参数进行实时监测,同时亦需具备一定的远程应急遥控手段,为水下平台的试验测试、实航作业等提供相应的测量与控制手段,确保其试验有效性和作业安全性。在工程上,通常采用适装声源的方式配合水声定位系统完成水下平台的实时定位跟踪,利用应答器等专用设备安装在水下平台上实现水声遥测与遥控等功能。但上述常规声源或应答器虽能满足水下平台的基本测控需求,但也存在功能单一、适装性差,以及重量重、尺寸大等不足,甚至无法在具备低功耗、小尺寸等特点的小型水下平台上安装。由此可见,常规声源和应答器占用了水下平台上极为宝贵的空间和动力,与其综合测控需求矛盾逐渐突出,甚至在一定程度上成为了制约其发展的瓶颈因素之一。
高精度水声定位跟踪多采用水下合作目标定位跟踪系统,配合声源(含信标)实现水下目标位置信息的实时测量[5]。按照工作方式主要分为两种:同步式和应答式。同步式需要在工作前与接收端进行时标同步,具有测量精度高、数据更新率快、结构简单等优点,但因为需要同步操作和长时保持,使用操作略为复杂,且成本较高;应答式无需同步操作,利用查询与应答往返的声信号进行定位跟踪,具有使用便捷、灵活性高等优点,但存在数据更新速率慢,软硬件结构相对复杂等不足。由于同步式水声定位系统具有更高的跟踪精度,实际工程应用中多采用同步跟踪方案[6]。水声遥测遥控主要利用多种编码方式构建水声通信链路,从而实现一定距离内的有效信息传输。如水声通信上常用的水声通信机、水声应答器等,多采用类似水声定位跟踪技术中的应答方式。
国外水声工程技术起步较早,推出一系列商用乃至军用水声定位及通信系列产品。如美国的雷神公司(Raytheon Company)、挪威的康斯伯格海事公司(Kongsberg Maritime)、英国的 Sonardyne、CTG 公司(Chelsea Technologies Group)等[7]。以英国 Sonardyne公司UM-8370 型产品为例,工作频率为18~36 kHz,具备水声定位及应答通讯功能,尺寸是直径为76 mm,长度为436 mm。相较国外来看,我国相关研究起步较晚,国内民用市场几乎被国外产品垄断[8]。但近年来,随着军事及民用海洋工程技术的不断扩展,国内水声工程相关设计和技术研究发展迅猛。中国船舶重工集团公司715 所的声学释放器为国内首型,工作水深可达1 000 m;哈尔滨工程大学的深海高精度超短基线定位系统,为我国“蛟龙”号、“发现”号和深海水下声学拖体等多种水下潜器提供了水下精确定位服务[9]。国内水声定位跟踪技术研究能为国防及民事应用提供技术保障,但在小型化水下航行体应用中较为薄弱,尚未出现同时具备同步声源和双工水声遥测遥控功能的声源系统工程应用。
本文针对小型滑翔机和便携式ROV 等小型水下航行体的水下试验测试,水下作业中的高精度实时定位跟踪及远程遥测与遥控,以及小型化水下航行体的实用性等实际需求,开展小型化、多功能同步编码声源技术研究,以满足小型水下航行体对声源系统的集成化、多功能,以及便携匹配安装等需求。
1 系统设计
对于小型化水下航行体的定位跟踪及综合测控系统来讲,水声基阵接收端可采用多种形式,但配套声源系统成为了关键设备,需解决小型、轻量化与多功能、长时独立工作之间的矛盾平衡问题。该声源系统主要设计输入是,小型水下航行体的实时水声定位跟踪、水声遥测,以及应急水声遥控等实航测试及操控需求。除了需要满足小型水下航行体的小型、轻量化安装要求外,还需满足1 000 m 海深的独立工作条件,具备实时水声定位跟踪匹配声信号发射,具备水下航行体姿态参数的编码发射,以及接收远程水声指令完成相应的控制命令等功能,属于综合测控声源系统。
水下便携式可应答同步编码声源系统主要由小型声源和配套综合调试设备两部分组成。小型声源安装在被测水下目标上,独立完成相应的水声定位、水声遥测及水声遥控等功能,综合调试设备主要用于声源的工作参数设置,试前同步等相关操作,同时亦为声源配套的水面的操控平台。如单独作为水声定位跟踪使用,可在试前对小型声源进行同步及设定后,由声源自行保持同步状态,脱离综合调试设备独立工作。系统原理框图如图1 所示。
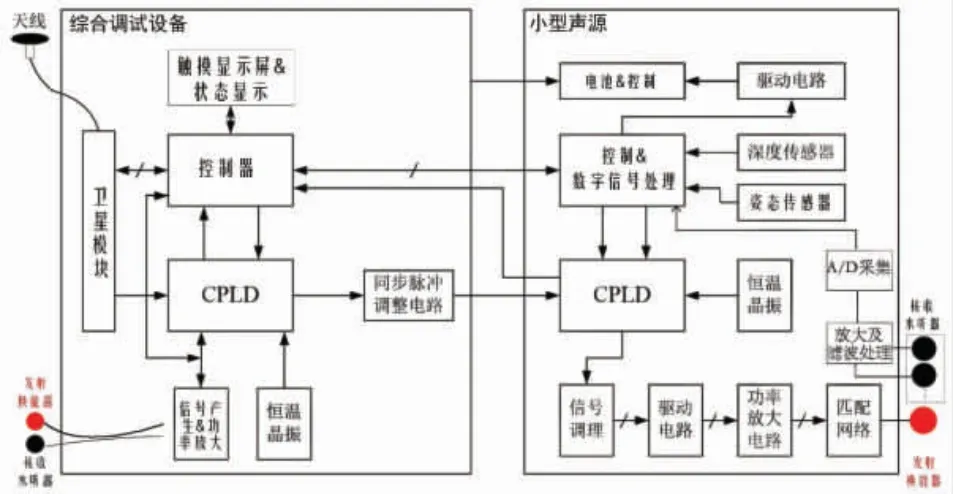
图1 系统原理框图
如图1 所示,小型声源安装在水下目标上独立工作,综合调试设备在试前通过电缆与小型声源进行连接,对声源的工作参数进行设置,如工作模式、工作频段、声源编码等。同时,利用GPS(Global Positioning System)等卫星信号处理后进行声源的时钟同步后,利用内部高稳晶振加相应处理算法,确保声源内部时钟与水声基阵接收端一致,进一步确保水声定位跟踪精度。
该方案与水声工程中常规声源或应答器设计方法不同的是:(1)小型声源在小尺寸基础上集成深度、姿态等传感器,集成高效能电池及相关控制与处理功能,可设置为同步或应答两种定位模式,同时设计有全双工通道,即在定位跟踪过程中可实时接收水面声学查询等命令并对其应答和执行;(2)考虑到多个水下目标的实航测试,设计声源可在试前进行单独编码设置,即给每个水下声源赋予唯一的编号,满足多目标水声定位测控需求;(3)综合调试设备与常规单纯试前设置不同的是,不仅完成对声源的试前设置,还具备试中声源状态查询和全双工应答与通讯功能。
1.1 组成及原理
小型声源和配套综合调试设备是声源系统的主要组成部分(图2)。综合调试设备采用组合式设计方案,集成应答与显控功能,基本原理不做详述。小型声源主要由组合换能器、电子水密舱、深度传感器、姿态传感器和调试接口组成。设置为应答定位模式,则自动接收查询信号进行应答;反之为同步式,试前需进行同步设置。声源在具体工作中可通过综合调试设备进行全双工进行查询与遥控,为水下目标的航行安全提供应急操控手段。

图2 系统工作连接示意图
如图2 所示,综合调试设备上电后选择小声源同步模式,之后进行高精度恒温晶振预热,以保证小型化声源内部时钟工作稳定。预热完成之后自动进行同步设置,并自动检测同步是否成功,如同步失败将自动重新进行同步设置,并将相关信息反馈给综合调试设备进行显示。声源内部组成结构如图3 所示。
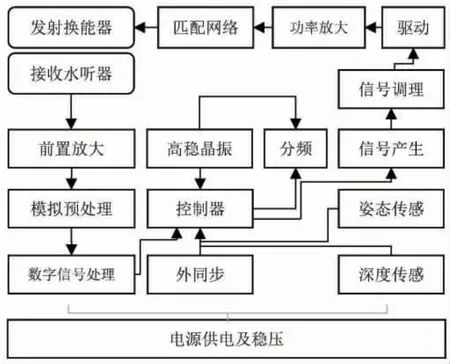
图3 声源内部组成结构框图
声源具体设置时可选同步、应答和读数3 种方式。读数模式主要是为了读取声源在水下工作时实时解算的深度、姿态等传感器原始信息,便于试后分析和比对;同步模式即为常规高精度同步式水声定位跟踪模式,为水下小型航行体提供位置信息;应答式为查询和应答回复模式的定位跟踪,实际会受限于水声基阵的查询情况。
1.2 声源信标结构
该声源系统能将水声定位跟踪和水声遥测遥控功能进行集成一体化设计,主要是设计了一种以时频编码结合信道纠错编码的声信标结构。
该信标结构不仅充分考虑多个水下目标之间的声信号干扰和自身的码间信号干扰,还在大量试验测试数据的基础上,从信标结构上降低水声信道的多途反射叠加和多普勒影响。同时,考虑湖海声信道的差异化设计,以及实际工程的可实现性(如声源的占空比、实际功率等)。以同步式声源为例,其信标结构如图4 所示。
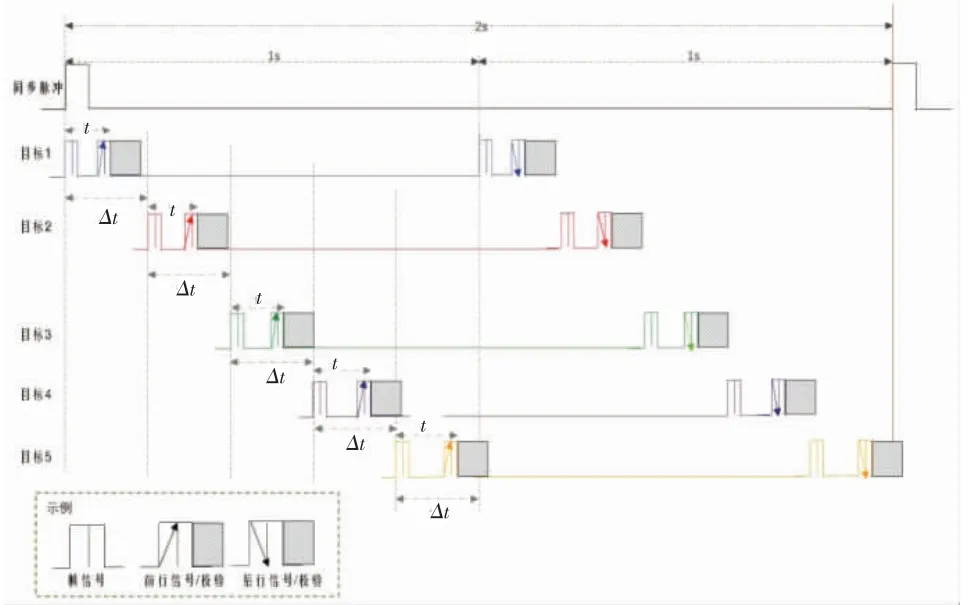
图4 同步式声源信标结构示意图
如图4 所示,同步脉冲为系统工作的统一时序基准,目标1~5 代表了5 个不同的水下航行体。其中t和Δt均为动态编码调整参数,随着遥测遥控信息或者不同目标位置等实时信息进行一定规则下的调整。
1.3 声源安装结构
当前水下航行体除了类似于水下无人集群形式外,同时也在小型化、低噪声、远程长航时等方向发展,应用方向覆盖环境监测、水下安防及相关军事攻防等相关专业。声源系统除兼顾常规大中型水下航行体综合测控要求外,主要针对小型水下航行体的适应性安装与使用。因此,声源系统的安装结构设计需综合考虑,在小型轻量化的基础上兼顾通用性和实用性。该声源系统采用一体式为主,分体式为辅的结构形式,其安装结构如图5 所示。
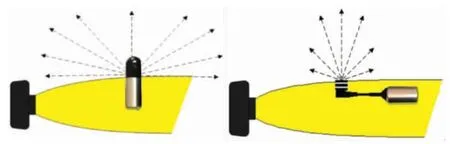
图5 声源安装结构示意图
如图5 所示,小型声源尺寸是直径为70 mm,长度为200 mm,重量为1.45 kg,即可独立安装在水下小型航行体上,亦可分体安装在航行体内,解决小型水下航行体的适配安装问题。同时考虑到航行体的外部整体结构流体性,可将声源的换能器阵替换为共形结构(图5-b)。确保声源安装后,不存在常规凸起结构,从而不对水下航行体的航行造成扰流等干扰。
2 关键技术分析
水下便携式可应答同步声源系统关键技术为信号产生、功率放大,以及样机研制两部分。其中信号产生中除了精确产生所需编码信号外,还需保证在同步工作模式下下长时工作稳定性,确保同步精度;功率放大需兼顾 18~36 kHz 与 9~14 kHz 两个较宽频带的带内平坦;需要综合平衡声源功能及性能与结构、重量、工作时长之间的矛盾,研制原理样机,并进行实航测试。
2.1 信号产生与功率放大
水声定位跟踪中实际工程中,常采用频率、相位等调制方式,对于声源产生来说,多以单频和调频信号为主[10],结合相应的编码算法获得最终声源发射所需信标信号。因此,声源系统中信号产生必须精确且高效。
为实时高精度产生信标,采用直接数字频率合成(Direct Digital Synthesis,DDS)原理构建信号发生器,DDS 是一种基于抽样定理的二维模拟信号与数字信号的转化,其本质是通过相位量化进行频率合成,具有频率分辨率高、频率捷变时间短、波形失真小等优点[11-12]。DDS 主要由频率控制字、相位控制字、相位累加器、波形存储器、数模转换器,以及低通滤波器组成,原理结构如图6 所示。

图6 DDS 信号产生及相位累加原理框图
如图6 所示,统一在系统时钟fc的触发下工作,其相位累加器是DDS 的核心组成部分。相位累加器由N位加法器和N位相位寄存器构成,产生寻址波形存储器的数字序列,数字序列范围从0 到累加器的满偏值。初始状态将相位控制字P送给寄存器,它决定所产生波形的起始相位。当信号产生时,每来一个时钟加法器将频率控制字K与寄存器输出数值进行相加,再把相加后的结果送给寄存器数据输入端,寄存器将相位数据返回到加法器数据输入端准备进行下次与频率控制字的相加,同时产生寻址波形存储器所需的地址序列。当相位累加器超过满偏置时就产生一次溢出,完成一个周期动作,详见图4。
设计中将频率控制字设为K,参考时钟为fc,相位累加器位数为N,将一个周期的余弦信号幅值编码存储在波形存储器中,则第n周期相位累加器输出序列为:

波形存储器输出序列为:

根据式(2)中输出信号展开傅立叶级数表达式为:

其中,将式(3)中只取实部表示为s(t)的三角函数形式为:
从式(3)和式(4)可以看出,输出信号除包括主频f0,还存在频率分布为fc±f0,2fc±f0,……的非谐波分量,因此为得到主频为f0的信号,还需在DAC 输出端加截止频率为fc/2 的低通滤波器。
DDS 产生的信号频率为:

式中:当K为1 时DDS 输出频率最低,根据奈奎斯特定律DDS 最大输出频率可达fc/2,但实际情况下为保证输出精度,规定每个周期最低采样精度8个点,于是K最大值为2N/8,输出最大频率为fc/8。
信号频率分辨率为:

DDS 模块通过可编程逻辑器件构建,FPGA 通过设置DDS 模块频率控制字和相位控制字来改变输出信号。考虑到实际工程中对声源主要指标的调整需要,声源系统中信号产生部分以FPGA 为主,在传统DDS 结构基础上,引入参数调整模块,通过FPGA 编程,灵活实现各类调制信号的产生,并能通过参数传输方式对载波抑制和输出功率进行实时调整,具有结构简单、调试便捷等特点。
功率放大组件采用线性功放结构,与常规开关功放相比较,线性功放发射电压便捷可调、适应与匹配性好,工作可靠性高,并且容易与前级调制电路匹配,不易产生脉冲谐波干扰[13]。因此,这里采用线性功率放大,同时加上桥式功放结构,进一步提高发射功率,进而提高声源级。具体通过控制前级输入信号大小来调节输出信号,从而控制所发出声信号强度。功率放大组件主要由于信号驱动级、功率放大级和匹配网络三部分组成,信号驱动级由增益控制和推挽驱动将电信号调整到合适的范围,并保证有足够的驱动电流;功率放大级由大功率器件和变压器将信号放大到足够的功率输出;匹配网络为LC 电路[14],使不同频率信号输出效率达到最优。
2.2 样机研制
水下便携式可应答同步声源主要安装在小型水下航行体上,除满足试验测试及应急操控等安全措施等要求外,亦不能较大影响航行体水下航行性能。相对来说要求声源发射声源级高,工作时间长,体积小,重量轻,如按照常规设计方法很难实现。
本文采用了一体化集成式设计方案,大规模压缩电路尺寸。对电路功耗、抗干扰性、功率放大电路所需的线圈、电容及匹配电路进行了充分计算,并尽可能减小所有器件及组件的尺寸合众路。如采用容量较高的锂聚合物电池,利用高精度恒温晶振替代传统铷钟、铯钟等大尺寸时钟源等。声源实物如图7 所示。
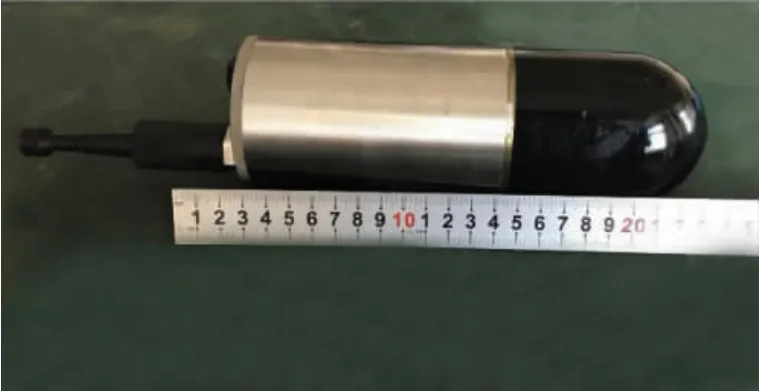
图7 声源实物图
如图7 所示,为了满足深海1 000 m 的使用环境条件,同时降低整体重量,声源的水密舱选用TC4钛合金材料,同时具备良好的耐腐蚀性能。声源样机尺寸是直径为70 mm,长度为200 mm,重量为1.45 kg;实际测试连续工作时长为12 h(1 s 周期,12 h 后声源级降低3 dB);深海工作深度采用压力釜进行12.5 Mpa 的水压测试,确保满足深海1 000 m 的实际使用要求。综上所述,设计与研制的声源系统,尤其是直接安装在小型水下航行体上的声源满足实际安装所需条件,满足设计输入的相关技术指标。
3 试验测试
该声源系统研制完成后,经过相应可靠性及环境试验,具备实航测试条件。具体以某小型民用滑翔机为载体,在国内某水域进行实航测试。为了确保水声定位测量的精度和数据率,本次实航试验以同步式模式为主。首先,在小型滑翔机上安装水下声源,试前利用综合调试设备进行参数与同步设置;同步完成后,该声源进入等待入水进行同步工作;入水后,声源检测如水传感器及深度传感器,满足综合判断条件后,声源发射同步定位信标信号;水声定位跟踪系统实时进行水下小型滑翔机的定位测量,完成本次实航试验。实航水声定位跟踪结果如图8 所示。
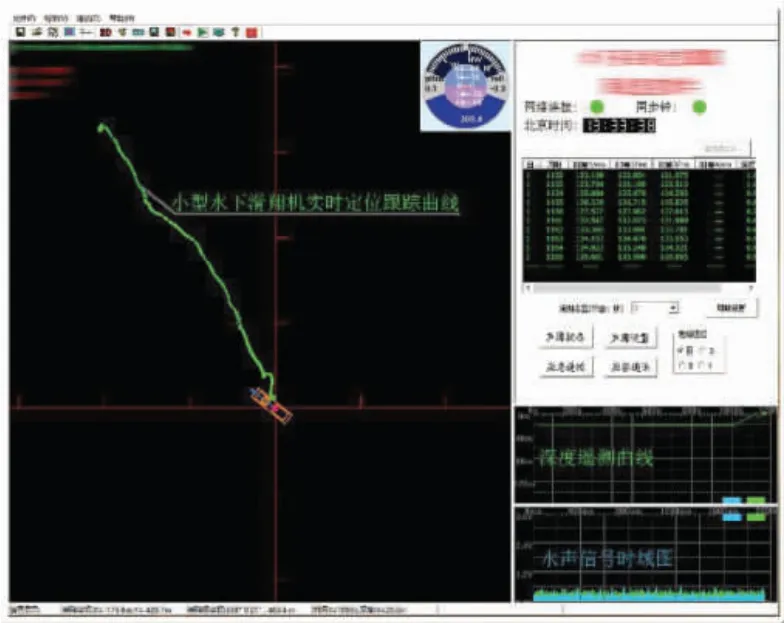
图8 实航试验测量结果图
如图8 所示,本文研制的小型声源可满足常规小型水下航行体的匹配安装要求,并在国内某水域进行实航试验。试验结果证明,该声源配合某型水声定位跟踪系统可实现超过3 km 范围内实时定位跟踪,其定位精度可达5‰,航行参数的水声遥测误码率可达10-5。由此可见,该声源系统实时水声定位跟踪精度高(发射的声信号质量好,时延精度长时可靠)、测量数据连续可靠,距离较远(声源级较高),并且相应应答控制满足全双工要求,具有良好的工程实用性。
另外,该声源还在大型水下航行体的实航试验中配套完成相应测试验证,为多型水下航行体的实航试验与水下作业提供配套定位设备。
4 结论
针对小型水下航行体试验测试及水下作业实际需求,开展水下便携式可应答同步声源系统技术研究。采用钛合金一体式结构封装声源内部高度集成的电子设备及电池,利用收发合置换能器时频编码方式实现全双工定位脉冲发射与远程水声命令信息的接收。
通过某小型水下滑翔机的湖上实航试验,试验证明该声源系统功能及性能指标均满足设计输入的具体要求。该声源系统与国外同类产品(UM-8370)相比较具有体积小、重量轻,便于安装等特点,同时具备水声定位声信号受控发射,以及全双工水声应答与水声遥测、遥控等复杂功能。除可应用与多种小型水下航行体的水下定位测量外,亦可在中、大型水下航行体上便捷安装,特别是近年来结合水下无人作战平台与水下集群技术发展[15],为该声源系统的应用场景提供了广阔空间。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
疯狂英语·新读写(2021年6期)2021-08-05
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
电子制作(2019年23期)2019-02-23
创新作文(1-2年级)(2017年7期)2017-12-26
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02