可移动智能垃圾桶定位及检测技术
2020-08-12 12:00吴剑英平雪良张逸伦陈祥马博琳刘家威
机械制造与自动化 2020年4期
吴剑英,平雪良,张逸伦,陈祥,马博琳,刘家威
(江南大学,江苏 无锡 214122)
0 引言
随着机器人技术的快速发展,机器人的应用在各行各业迅速展开,生活中机器人的应用也正在悄然兴起,如自动清洁机器人等,但其应用还不成熟多见[1]。目前,移动机器人的技术以及室内定位技术发展较快并相对成熟,广泛应用于各种领域。随着手机的普及,智能时代正在到来,用手机APP来进行控制也非常方便和简单。据文献及专利调查,目前国内市面上的智能垃圾桶大多只有简单的自动开合盖子、自动套袋等功能,具有可移动及垃圾满溢检测的智能垃圾桶并不常见。
本文旨在解决现有技术中存在的问题,提供一种智能垃圾桶定位及检测技术。主要包括以下内容:1)移动平台的室内定位。室内定位技术是机器人控制技术研究方向中一个非常重要的问题,到目前为止,室内定位技术主要有相对定位以及无线定位两大类。相对定位技术主要原理是在测量移动平台相对于初始位置的方位及距离后,再由初始位置以及测量信息确定机器人的当前位置。常用的传感器包括光电编码器、里程计及惯导系统(如速度陀螺、加速度计等)。无线定位技术目前主要有3种定位技术:ZigBee 定位技术、WiFi 定位技术、UWB 定位技术[2-3]。考虑到与手机的通信,本文的设计优选WiFi定位技术。2)路径规划。依托于CCD相机,激光测距传感器等,基于SLAM算法构建室内地图可较好地实现路径规划[4]。3)垃圾桶满溢检测。市面上智能垃圾桶仅具有自动开合的功能,结构单一,普及率不高。本文设计的智能垃圾桶在涵盖传统垃圾桶所具备功能的同时,采用红外检测技术实现垃圾桶满溢检测的功能。
1 总体设计方案
本文机器人移动平台以一台三轮式双排全向轮底为基础,系统利用陀螺仪以及直流电机的差速转动实现循迹。采用三轮速度的不同组合方式完成二维平面内任一方向的移动,利用激光测距传感器进行测距,实时处理分析已收集到的数据信息,进而实现避障功能,很好地解决了机器人的路径规划问题[5-6]。针对机器人定位问题,本文采用WiFi定位技术。由于周围环境对机器人定位算法有一定的影响,通过分析几种常见的距离判断算法,经过实验,为机器人规划出一块确定的运动与识别区域,实现了机器人的定位功能。针对垃圾桶满溢检测及桶盖智能开合问题,本文采用红外检测技术,在内桶顶部搭载一对射式红外传感器,若检测到垃圾满溢则通过WiFi通信向用户发出信号。在外桶盖顶部搭载一反射式红外传感器,当有物体经过垃圾桶,垃圾桶盖打开,经一段时间的延时,自动闭合。具体方案以及主要机械结构和实物如图1、图2所示。

图1 整体方案

图2 智能垃圾桶主要结构
2 移动底盘的定位及控制
2.1 移动底盘的定位
本设计中移动底盘的定位采用WiFi室内定位技术。该技术根据定位过程中采用不同的硬件方法分为 AOA、TOA、TDOA、RSSI 定位。本文采用最常用的RSSI(基于信号强度的)定位技术,测得定位环境中无线 AP 节点的信号场强度值后,根据该信号强度值,再基于已有的理论和经验建立距离与信号强度值的关系方程,由此根据信号强度值计算发射端和接收端之间距离,从而得到定位端的具体坐标值。因为WiFi信号收发两端存在一定误差,所以通过引入随机变量xε,将随机误差的影响尽量降到最低[7]。 基于路径损耗的对数衰减模型如下式所示:
RSSI是接收端在距离d处获取到的无线 AP 节点的信号强度,单位是 dBm;RSSI0是常值,其大小取决于在参考距离d0处测量得到的无线 AP 点的信号强度;d为参考距离,一般选取为 1m;γ是路径损耗指数;xε是一个随机数,主要受信道噪声和阴影的影响。
假设定位端可以接收到A、B、C 3个无线AP节点的信号,且3个圆两两相交,即可通过三角质心算法确定定位端的坐标值[8]。三角质心算法模型如图3所示。
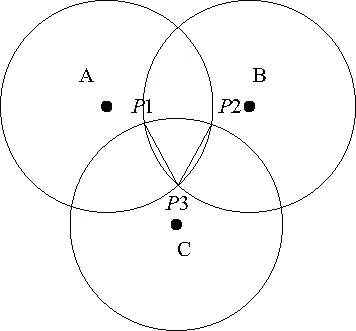
图3 三角质心算法模型
图3中圆A、圆B交点P1的求解过程如下:
上述方程组的解即为P1的坐标,同理可求P2、P3;定位端坐标即为:
2.2 移动底盘的控制
底盘运动由ST的32位微控制器STM32F407ZGT6进行控制。该单片机板搭载112个可编程IO口以及大量的片上外设,并含有ATK-RM04WiFi模块,该WiFi模块支持 RS232 串口、 LVTTL 串口,支持电压工作范围为DC6 V~16 V,支持串口转以太网、串口转 WIFI STA、串口转 WIFI AP 等连接形式。同时, ATK-RM04 兼路由器功能,完全可以当成一个路由器使用,因而更方便用户移动设备与底盘控制系统之间的实时通信。
移动底盘结构如图4所示。

图4 移动底盘模型
对底盘的移动进行运动学分析可以得到以下公式:
vA=-vx+ωr
其中:vA、vB、vC分别是3台电机的转速;vx、vy分别是以底盘中心为坐标原点建立的正交坐标系沿x、y方向的速度分量;ω为角速度;r为全向轮半径。
根据以上原理,设置入口参数为x、y、z轴速度,通过C语言编程解算求出3台电机的转速,传入位置PID控制器,通过不断与目标点之间的矫正,最终到达目标点。
3 垃圾桶红外检测系统设计
文中设计的垃圾桶内桶与外桶分离,利用电磁耦合技术连接上盖座和外桶,极大地方便了内桶的取出;上盖座搭载一桶盖开合检测装置,当用户距离垃圾桶盖上部15~20cm时检测装置收到信号,主控板向180°舵机发送1.5ms的脉宽,上盖打开; 5s后自动关闭。该检测装置采用红外发光二极管,应用红外反射光强法检测桶盖上部是否有物体靠近。具体方式为红外管不断发射调制后的信号,光敏管接收调制的红外信号,原理如图5所示。

图5 红外发射接收原理
反射光强度的输出信号电压Vout是反射面与传感器之间距离的函数,设定输出电压达到某一阈值时舵机工作,带动桶盖打开,经5s延时后桶盖自动闭合。
在内桶顶端置有一对射式红外传感器,常态下光敏管可接收到红外信号,当垃圾满溢时,红外光被阻断,光敏管接收不到信号,此时通过WiFi通信提示用户“垃圾已装满”。红外检测程序框图如图6所示。
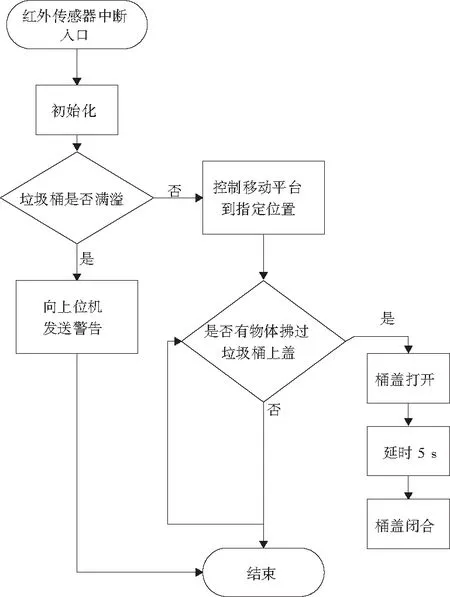
图6 红外检测程序框图
4 结语
本文采用的WiFi定位、WiFi通信、红外检测技术,很好地解决了智能垃圾桶的遥控定位及检测问题,提高了垃圾桶的定位精度以及垃圾桶满溢检测的实时性。在智能家居以及互联网+的环境下,本文提出的定位及检测技术将大大促进智能垃圾桶的发展。随着本技术的普及,智能垃圾桶将更加深入居民日常生活,彻底改变人们的环境保护理念,用户可通过手机等搭载WiFi模块的上位机对智能垃圾桶进行传呼,随手将手边垃圾丢入垃圾桶,这将极大提高居民生活环境的整洁度、舒适度。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
中成药(2022年1期)2022-01-27
好孩子画报(2021年2期)2021-03-15
趣味(作文与阅读)(2021年11期)2021-03-09
趣味(语文)(2021年11期)2021-03-09
作文与考试·小学高年级版(2020年19期)2020-11-16
现代测绘(2018年1期)2018-03-06
测绘通报(2016年9期)2016-12-15
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年4期)2016-03-01