火星探测器制动捕获策略研究
2020-08-12 06:20:06王靓玥郭延宁马广富
深空探测学报 2020年2期
王靓玥,郭延宁,马广富
(哈尔滨工业大学 哈尔滨,150001)
引 言
火星是距离地球最近的类地行星,自1960年起,人类就开始了火星探测的步伐,截止目前一共进行了43次火星探测任务[1]。2016年1月,中国火星探测项目正式立项。然而,已发射的火星探测器失败率高达50%,较大一部分探测器是由于未成功进行捕获制动而任务失败,如俄罗斯1973年7月发射的“火星5号”,美国1999年12月发射的“火星气候探测者”等[2]。火星制动捕获阶段器地时延大,且机会唯一,是探测器飞行全过程中最为重要的阶段。火星制动捕获是指在探测器接近火星时对探测器制动减速,使探测器能够被火星引力吸引进入火星环绕轨道,而不飞掠或撞击火星。捕获策略的选择对探测器的总体设计及探测任务的规划有直接影响[3],高性能的捕获策略是火星环绕及着陆任务开展的重要前提条件。因此分析研究火星制动捕获策略对火星探测任务的成功开展至关重要。
火星同地球一样,具有大气,因此捕获制动可分为两类。一类为大气捕获制动,即探测器不经制动直接进入火星大气,利用大气的摩擦阻力进行减速[4]。吕静[5]等针对大气制动捕获,分别建立了在旋转大气和静止大气环境下的火星捕获模型,对任务耗时、探测器承受热量等进行比较分析。另一类为直接捕获制动,即利用探测器的推力器制动实现轨道捕获,可分为直接捕获、匀速捕获、变速捕获3类。李军锋[3]等针对有限推力模型,利用粒子群优化算法和最优控制对轨道半长轴和偏心率进行约束,对燃料最优捕获、姿态匀速转动和姿态惯性定向捕获策略即本文中的变速捕获、匀速捕获、直接捕获策略进行仿真比较,得到燃料最优捕获制动效果最好,但工程上不易实现等结论,但对3种捕获策略的比较不够全面系统。罗续盛[6]等利用多目标粒子群算法优化控制参数,以消耗燃料和入轨近火点的高度误差为双目标,对3种制动捕获策略进行分析,得到匀速捕获策略可为实际任务优先选用,且双目标提供更全面的决策信息。闵学龙[4]等研究了这两类火星制动捕获策略,并对任务耗时及速度增量进行了仿真分析比较,得到大气捕获策略速度需求小,制动耗时长,过载大,直接捕获策略速度需求大,制动耗时短等结论。由于火星大气成分复杂多变,大气捕获对探测器隔热性能要求高,制动过程耗时长,直接捕获更具有工程应用价值。
影响火星制动捕获性能的因素较多,比如制动捕获方案的选取、推力发动机点火时刻的选取、推力发动机关机条件设计、推力发动机最大推力约束、目标过渡轨道设计等[12]。对于直接捕获制动情况,目前文献中提到的已有的制动捕获方案包括定向捕获、匀速捕获、变速捕获等3种,而目前公开发表的文献中关于这3种捕获方案的系统对比分析较少,此外,关于推力发动机的点火时刻、关机条件或过渡轨道设计等因素对制动捕获效果的影响研究也较少。
基于此,本文建立了火星探测器制动捕获过程中简化的动力学二体模型和姿态动力学模型,针对3种典型的制动捕获方案分别给出了详细的期望姿态定义,通过设定特定远火点高度作为过渡轨道条件,在只进行一次点火制动的情况下,定量地对3种策略进行分析比较。并以变速捕获制动为例,对不同点火时刻的制动效果进行仿真比较,以探寻燃料最优的点火时刻。鉴于零控速度偏差(ZEV)和零控位移偏差/零控速度偏差(ZEM/ZEV)的制导方法已成功应用于弹道导弹拦截、小行星拦截等实际任务,并已取得成功案例[7-8],本文探索了ZEV和ZEM/ZEV制导策略在火星制导捕获中的应用。
1 火星探测器制动捕获动力学建模
1.1 轨道动力学建模
理论上,天体引力场可以达到空间无穷远处,但在一定范围内,某个天体产生的引力起主导作用。火星探测器在接近火星至被火星捕获的过程中,火星探测器受到太阳、火星、火卫及太阳系其他大质量天体的引力作用,属于多体动力学问题。由于距离等多因素的影响,其它天体对火星探测器产生的引力大小相对于火星对探测器产生的引力可以忽略,同时,考虑火星为匀质标准球体,即忽略火星的非球形引力摄动项,可将火星制动捕获问题简化为二体模型。
探测器的轨道动力学方程如式(1)所示

其中:r为探测器的在火心惯性坐标系(MCI)的位置矢量;v为探测器的速度矢量;µm为火星的引力常数;Isp为探测器推力发动机真空比冲;m为探测器的质量;F为推力器产生的制动力。
1.2 姿态跟踪控制建模
在火星制动捕获过程中,由于仅配置一个大推力发动机用于产生控制加速度,在施加不同方向的推力时,必须配合姿态控制系统完成。姿态跟踪控制的数学模型可由式(2)表示[9]

2 3种典型制动捕获策略
设期望坐标系三轴的单位矢量在MCI的坐标为(i,j,k),探测器捕获点火时刻的初始速度矢量为v0,位置矢量为r0。
火心惯性坐标系到期望坐标系的转换矩阵,可以如式(3)表示

2.1 定向捕获
定向捕获方式是指探测器的指向在MCI中始终保持固定,推力发动机向一个固定的方向输出推力。
定向捕获方式以探测器点火时刻的姿态为整个制动捕获时刻的期望姿态指向,即始终保持探测器姿态不变,即推力方向始终为制动捕获点火时刻的反方向。当探测器轨道参数中的远地点高度下降到一定阈值以后即可停止捕获。
(id,jd,kd)的确定方式如式(4)

其中:id方向为速度反方向;jd方向为轨道法向;kd方向与id、jd成右手系。
2.2 匀速捕获
由于定向捕获方式推力方向与速度方向不始终在同一直线上,只有沿速度矢量方向的推力分量才会对探测器产生阻尼制动作用,推力利用率低。为了提高推力的利用率,将探测器的捕获轨道近似为圆轨道,使探测器在轨道平面内匀速旋转,旋转角速度的选取如文献[10]所示。停止捕获条件同定向捕获。
(ic,jc,kc)的确定方式如式(5)

其中:ωMean为探测器匀速变化的角速度;∆t为制动捕获过程开始后经历的时间;R2为期望坐标系匀速旋转的转换矩阵。
2.3 变速捕获
为了最大限度地利用推力,主推力器在空间中输出推力方向应始终沿着速度矢量的反方向。变速捕获方式需要实时测量探测器的速度矢量,制动捕获过程的期望姿态应随着速度矢量的改变而改变。停止捕获条件同定向捕获。
(it,jt,kt)的求法如下

2.4 仿真校验
取制动捕获点火时刻为探测器距离火星位置最近的时刻,其速度矢量、位置矢量由进入火星影响球半径的速度矢量、位置矢量自由运动求得,仿真条件参照罗续盛[6]等的论文,如表1所示。
通过Matlab软件对公式(4)~(6)对应的3种捕获模式进行数值仿真,3种捕获模式下探测器的运行轨迹如图1所示,轨道平面如图2所示。3种捕获模式的仿真结果及优缺点如表2所示。

图1 探测器运行轨迹图Fig. 1 Trajectory of probe
从图1可以看出,定向捕获探测器的运动轨迹最长,间接反映了该捕获模式耗时最长。主推力器开启后,燃料消耗与捕获耗时成正比,故定向捕获燃料消耗最多。从表2和图2可得,当匀速捕获角速度选取较为合适时,匀速捕获与变速捕获的制动效果相当。
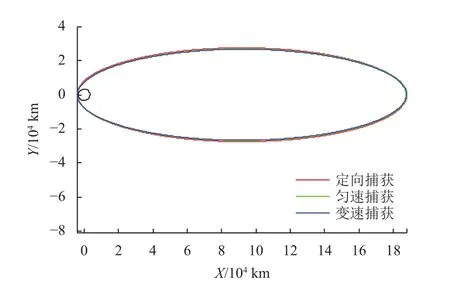
图2 探测器运行的轨道平面图Fig. 2 Orbital plane of probe running
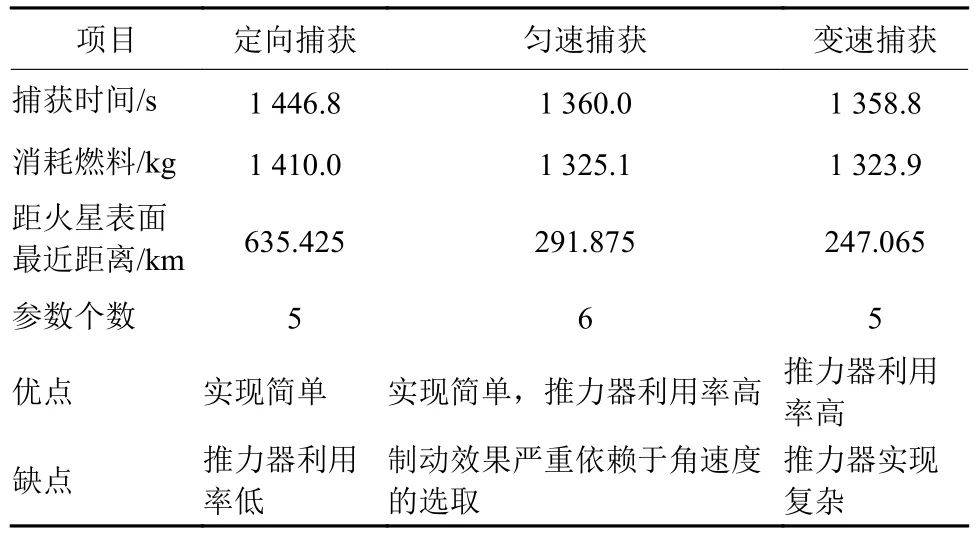
表2 仿真结果及优缺点Table 2 Simulation result, merits and demerits
定向捕获推力发动机在空间中向一个固定方向输出推力,捕获过程实现简单,但探测器的速度矢量实时变化,其推力器利用率低,制动捕获过程耗时长,燃料消耗多,一般在实际任务中较少使用。
匀速捕获在角速度选取合理时,耗时短,消耗燃料少,制动效果与变速捕获相当,但其制动效果的优劣严重依赖于角速度的选取。一般在实际任务中常作为备选方案使用。
变速捕获的制动效果最优,推力发动机产生制动力方向始终沿着速度矢量的反方向,推力器燃料消耗低,但需要实时速度信息反馈,制动效果受反馈信息精度影响。在实际任务中一般选择变速捕获方式,如欧洲航天局(European Space Agency,ESA)发射的“火星快车号”(Mars Express)[11]。
3种捕获策略的近火点的高度均在200 km以上,有足够的余量保证探测器因误差原因而受到火星大气摩擦,导致不可控影响或因火星表面不平撞到火星。
3 变速捕获策略点火时刻分析
3.1 定量分析
以2.4节选择变速捕获策略为例,探测器的点火时刻为近火点时刻。为了定量的比较不同点火时刻的制动捕获效果,其中考虑近火点时刻为0 s,仿真可得不同点火时刻对应的捕获过程耗时和耗燃料曲线如图3所示,不同点火时刻对应的捕获轨道中距火星表面的最近和最远距离如图4所示。
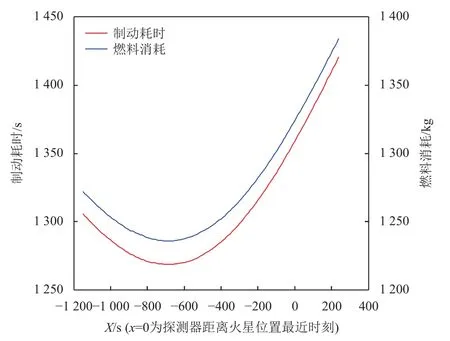
图3 不同点火时刻耗时、耗燃料Fig. 3 Time and fuel consumption of ignition time
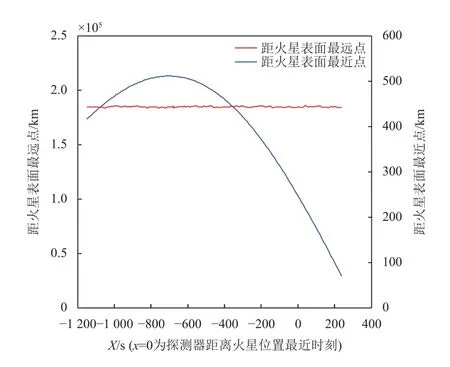
图4 不同点火时刻距火星最远、近距离Fig. 4 The furthest and nearest distance from Mars of ignition time
由图3~4仿真数据可得,点火的最优时刻在探测器到达近火点前688 s,此时的制动捕获时间为1 268.4 s,消耗燃料为1 235.9 kg。燃料消耗较近火点时刻点火减少6.7%左右,制动耗时减少6.7%左右,捕获后轨道近火点最高。探测器的点火时刻不宜在探测器到达近火点后,其制动捕获的耗时过长,消耗燃料过多,且制动捕获后轨道的近火点高度过低。
为推广得到更为一般性的结论,改变2.4节中的仿真条件,对各个工况下的制动捕获进行打靶仿真,仿真条件及结果如表3所示,不同点火时刻对应的捕获过程耗时和耗燃料曲及不同点火时刻对应的捕获轨道中的最近和最远距离曲线由于篇幅原因不详细给出。

表3 不同工况仿真条件及结果Table 3 Simulation results of different conditions
3.2 定性分析
由仿真示例推广可得,探测器燃料最优点火时刻为探测器到达近火点前制动耗时一半左右对应的时刻。点火时刻不宜选择探测器到达近火点后,其制动捕获的耗时过长,消耗燃料过多,不利于探测器的设计与控制,且制动捕获后轨道的近火点高度过低,探测器有撞到火星表面的危险。
4 基于ZEM/ZEV的制动捕获策略
零控速度偏差(ZEV)、零控位移偏差(ZEM)最早应用于制导技术,在弹道导弹拦截,小行星拦截等工程应用中已取得一定成功。本文将ZEV、ZEM/ZEV制导策略应用于火星捕获任务,设计基于ZEV、ZEM/ZEV闭环制导的制导捕获策略,以实现特定捕获过渡轨道。
4.1 ZEV制动捕获策略
给定制动捕获任务初末时刻t0和tf,以及制动捕获点速度矢量r0,位置矢量v0,期望时刻的速度矢量vf,考虑基于加速度平方积分形式的性能指标如式(7)所示。

ZEV指在不控情况下,探测器的期望速度矢量与由当前时刻自由运行到期望时刻的速度矢量之差。ZEV表征当前状态同期望状态的速度差。可由式(8)表示

利用性能指标及约束条件得到最优加速度如式(9)

其中:tgo=tf−t为剩余飞行时间。
4.2 ZEM/ZEV制动捕获策略
给定制动捕获任务初末时刻t0和tf,以及制动捕获点火时刻速度矢量r0,位置矢量v0,期望时刻的速度矢量vf,位置矢量rf,考虑基于加速度平方积分形式的性能指标如式(7)所示。
ZEM/ZEV指在不控情况下,探测器的期望速度矢量、位移矢量与由当前时刻自由运行到期望时刻的速度、位移矢量之差。ZEV由式(8)所示,ZEM可由式(10)表示

由文献[7~8]可得,最优控制律表达式如式(11)所示

4.3 仿真校验
以变速捕获制动结束时的速度、位置矢量作为期望时刻的速度、位置矢量,取2.4节的仿真结果作为本次仿真条件,即制动捕获时间为1 358.8 s,初始及期望速度、位置矢量如表4所示。仿真结果如表5所示,仿真结果图由于篇幅原因不详细给出。
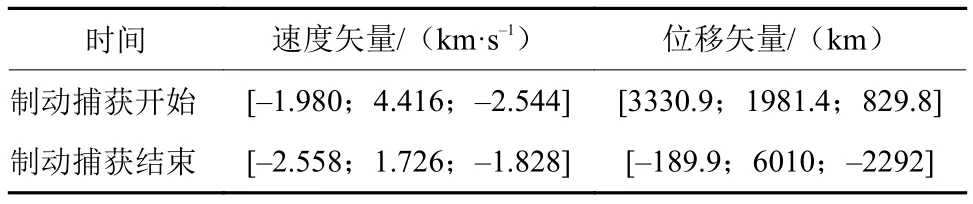
表4 ZEV、ZEM/ZEV仿真条件Table 4 Simulation conditions of ZEV and ZEM/ZEV
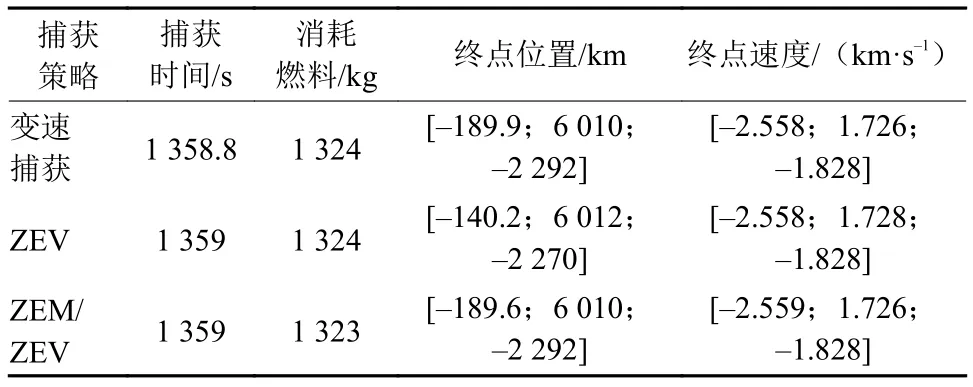
表5 新型捕获策略仿真结果Table 5 Simulation results of the new capture strategy
由仿真结果可以看出ZEV和ZEM/ZEV制动捕获策略可以获得和变速捕获相当的制动效果,并且能满足特定的末端位置/速度约束。
5 结束语
本文首先对火星探测器捕获问题进行动力学建模,并阐述了3种典型捕获策略的原理,通过典型数值仿真进行分析比较,系统地总结了3种捕获策略的优缺点,得到定向捕获策略控制简单、实现容易但燃料消耗高;匀速捕获燃料消耗低但制动捕获效果严重依赖角速度的选取;变速捕获燃料消耗低但需要实时速度信息的结论。进一步地,通过数值分析不同的点火时刻,得到结论:探测器自点火点飞行至近火点消耗时间为制动捕获总时间一半时对应的点火时刻为最优点火时刻。同时,当期望时刻位置矢量、速度矢量已知时,设计的基于ZEM/ZEV的闭环制导捕获策略不仅能够获得与变速捕获相当的捕获效果,而且能够满足特定的末端位置/速度约束,可作为实际任务的一种备选方案。此外,未来可以分析最佳点火距离或设计新型制动捕获策略以期为实际探火任务提供理论支撑。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
海外文摘(2021年7期)2021-08-31 21:33:44
红外技术(2021年1期)2021-01-29 01:41:54
大科技·百科新说(2020年10期)2020-03-01 05:25:19
家庭科学·新健康(2019年10期)2019-11-18 08:28:38
鹿鸣(2018年1期)2018-01-30 12:05:42
中国环境监察(2016年7期)2016-10-23 05:36:26
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
出版与印刷(2013年3期)2013-01-31 03:26:11