电动变载荷加载系统的建模及线性自抗扰控制 ①
2020-08-11 01:42刘福才
高技术通讯 2020年7期
刘福才 赵 旭
(燕山大学工业计算机控制工程河北省重点实验室 秦皇岛 066004)
0 引 言
根据我国发展空间大型精密操控机构的重大需求,应对微重力环境下难以模拟的挑战[1],以实际运动副间隙尺寸与接触面摩擦阻力变化研究为突破口,探讨不同重力环境空间机构运动行为的根本差异。摩擦磨损试验机是一种对材料及润滑剂在给定的条件下进行摩擦与磨损性能试验的试验机。文献[2]提出一种气动变载荷摩擦磨损试验机,并将模糊自适应逆控制方法应用于气动加载系统中。然而气动加载系统需要空气压缩机为其提供动力源,同时存在着气体可压缩性、流动状态的复杂性以及比例阀的时滞性等缺点。对此研究人员设计了一种电动变载荷摩擦磨损试验机,电动加载系统核心部件电动缸的工作原理是伺服电机带动丝杠旋转,通过螺旋运动将电机的旋转运动转换为加载机构的直线运动[3]。此过程完全由机械结构实现,无需额外的辅助装置,其结构紧凑、占地面积小、无污染、噪音低、后期维护量小,并且具有良好的可控性。然而,该系统是一种强耦合、高度非线性化和不确定性的系统[4],实际交流永磁电机伺服系统中存在着电机参数实时变化以及精确数学模型难以建立等内部扰动和负载转矩、摩擦力及转动惯量实时变化等外部扰动,因此,在应用方面仍存在诸多问题,而总的不确定性扰动对于伺服系统来说是影响其实现高性能的主要障碍,如何抗扰也就成为了伺服控制系统中的核心问题[5]。
目前,为解决上述问题已有很多控制策略。文献[6]提出了一种基于奇异摄动理论的自抗扰控制方法,仿真结果表明在不同重力环境下柔性关节空间机械臂均能实现很好的轨迹跟踪和抖振抑制,且能有效抵抗内外扰动。文献[7]采用正交控制方法对比普通方法可有效抑制半球谐振子工艺缺陷带来的误差。本文从工程应用角度出发,针对电动缸驱动的变载荷摩擦磨损试验机压力控制系统在加载过程中存在系统参数变化以及外部干扰等不确定性干扰因素情况,设计了一种线性自抗扰控制(linear active disturbance rejection control, LADRC)算法,并在电动变载荷摩擦磨损试验机平台上进行验证,为后续的开发提供一种基于电动缸的有效可行的可变压力控制系统。
1 控制系统的组成与数学建模
1.1 电动加载系统的组成和工作原理
电动加载系统的试验装置如图1所示,主要由电动加载系统、样品台传动系统、电动平移台系统、基于工控机的测控系统4部分组成。样品台传动系统主要由伺服电机通过同步带带动样品台进行旋转运动。加载系统主要由伺服电机带动电动缸运动,电动缸将伺服电机的旋转运动转换为直线运动,来实现摩擦压头对样品的实时加载,并通过力传感器实时反馈试验载荷。工控机通过程序算法设计实现对试验载荷的精准控制。

图1 电动加载控制系统试验装置
1.2 电动加载系统的数学模型的建立
由于电动变载荷摩擦磨损试验机加载系统为系统关键部分,存在更多的非线性,对此进行建模分析,加载系统控制原理框图如图2所示。

图2 试验机加载系统结构框图
1.2.1 交流伺服电机数学模型
电动加载系统由伺服电机通过联轴器带动滚柱丝杠运动,滚柱丝杠将电机的旋转运动转换为直线运动,所以系统的机械传动部分以伺服电机输出轴的角度变化为输入,以滚柱丝杠的直线运动为输出。交流永磁同步伺服电机带动整个电动系统运行,如图3所示,建立电机的数学模型。

图3 电机等效电路图
电机的电压平衡方程为
(1)
式中,Uq为电动机电枢电压(V),iq为电动机电枢电流(A),R为电动机电枢电阻(Ω),L为电动机的电枢电感(H),ke为电动机反电动势系数常数(Vs/rad),ω为电动机转子角速度(rad/s)。
电动机的电磁转矩方程为
Tm=KTiq
(2)
式中,Tm为电动机输出转矩(N·m),KT为电动机转矩系数(N·m/A)。
样品台传动系统工作时,上下试样相互摩擦产生磨损,由于压力不断变化,磨损程度也不相同,由此产生一个径向的反作用力矩,这不仅影响电动缸输出力的精准程度,而且导致电动缸轴产生振动。在进行理论推导过程中,无法进行公式描述,但是在试验过程中可以通过相应的传感器进行数据测量,将这些因素整体用符号MZ表示。电机轴上的转矩平衡方程为
(3)
式中,TL为负载转矩(N·m),Bω为折算到电动机轴上的粘性阻尼系数(N·m·s/rad),J为折算到电机轴上的总转动惯量(kg·m2)。
1.2.2 电动缸数学模型
工控机输入指令,控制器通过驱动器控制伺服电机旋转,在运转t时间内电机轴的角位移为

(4)
式中,ω(t)为电机角速度。
伺服电机与电动缸滚珠丝杠相连,电动缸将伺服电机的旋转运动变为竖直方向的直线运动,输出轴的直线位移为
(5)
式中,s为滚柱丝杠导程。
1.2.3 压力传感器
压力传感器存在于电动缸与负载之间,并实时测量压力的大小,将其等效为比例环节,即:
Uc=KhF
(6)
式中,Kh为电流增益,F为检测压力,Uc为输出电压。
另外,压力传感器模拟输出与检测压力成比例关系,虽然与理想直线存在偏差,认为压力传感器的输入和输出具有良好的线性关系,可得:
F=Kfy
(7)
式中,Kf为压力增益。
综上,对上述伺服电机、电动缸、压力传感器3个模块进行联立,可得电动变载荷摩擦磨损试验机的数学模型:
(8)
为便于对控制器的分析与设计,将其转换为电动变载荷摩擦磨损试验机压力跟踪控制系统状态方程。假设状态变量x1=iq,x2=ω,x3=θ则系统状态方程为
(9)
式中,
式(9)为电动变载荷摩擦磨损试验机的数学模型,在后续设计控制器的过程中需要考虑对扰动项的处理,保证系统具有较高的控制精度和良好的跟踪性能。
1.3 线性自抗扰控制器设计
自抗扰控制是由韩京清[8]于1998年提出的,自抗扰控制器的原始结构由跟踪微分器(TD)、扩张状态观测器(ESO)和状态误差非线性反馈控制律(NLSEF)3个部分组成,其中扩张状态观测器是核心部分,但是这种原始形式结构复杂、参数众多,实现起来很困难[9]。而针对上述难以应用的问题,高志强教授[10,11]等人将非线性自抗扰控制器的非线性函数进行线性化处理,控制参数大大减少,提出了线性化、带宽化、易于在实际工程应用实现的线性自抗扰控制器,而控制效果并没有明显差异。目前已在飞行器控制、机器人控制、导弹飞行控制、精密机械加工等各研究领域有所成就,为自抗扰控制器的发展应用提供了更广阔的前景。
自抗扰控制不依赖系统的精确模型,可直接利用被控对象的输入输出信息对系统状态以及“总扰动”进行估计并在线补偿,在存在多种不确定性时,依然可以保持良好的控制性能,二阶线性自抗扰控制原理图如图4所示。
由图4可以看出线性自抗扰的控制量为

图4 二阶线性自抗扰控制器结构框图
(10)
式中,u0为线性控制律。
u0=kp(r-y)-kdz2
(11)
式中,kp、kd为控制规律参数,r为给定值的输入,y为系统输出。线性控制律中参数kp、kd具有相对明确的物理意义,kp表示比例增益,kd表示微分增益,其整定方法可类比比例-微分(proportional-derivative, PD)控制器中的参数整定。
线性扩张状态观测器(linear extended state observer,LESO)为
(12)

2 试验研究
图5所示为电动变载荷摩擦磨损试验机平台,基于设计的试验机平台,对ADRC的有效性和实用性进行了试验验证。为满足控制系统的需求,在Qt Creator 4.3.1开发环境下,采用C++语言设计应用程序界面,如图6所示。

图5 电动变载荷摩擦磨损试验机平台

图6 上位机控制界面
2.1 空载试验
在样品台不转动的情况下进行空载试验,为了突出LADRC的控制性能,分别采用比例-积分-微分(proportional-integral-derivative,PID)和LADRC进行控制。
2.1.1 恒值加载
图7和图8分别给出了采用PID及LADRC控制的试验载荷为F=200 N的恒值条件下试验载荷跟踪响应曲线及误差曲线。由图中可知,在试验载荷为200 N的条件下2种控制算法都可以使载荷跟踪上给定值,使稳态误差趋近于0,但是在LADRC控制算法下4 s左右载荷趋于平稳,控制响应速度要快于PID,且误差量更小。
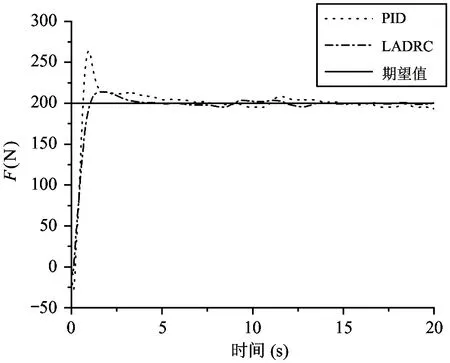
图7 恒值加载时试验载荷跟踪响应曲线

图8 恒值加载时试验载荷跟踪误差曲线
2.1.2 正弦波加载
图9和图10分别给出了采用PID及LADRC控制的试验载荷幅值F=200 N、周期T=6 s的正弦波条件下试验载荷跟踪响应曲线及误差曲线。由图中可知,2种控制算法都可以使载荷跟踪上给定值,但是PID控制的载荷会在波峰期有一定的超调,在波
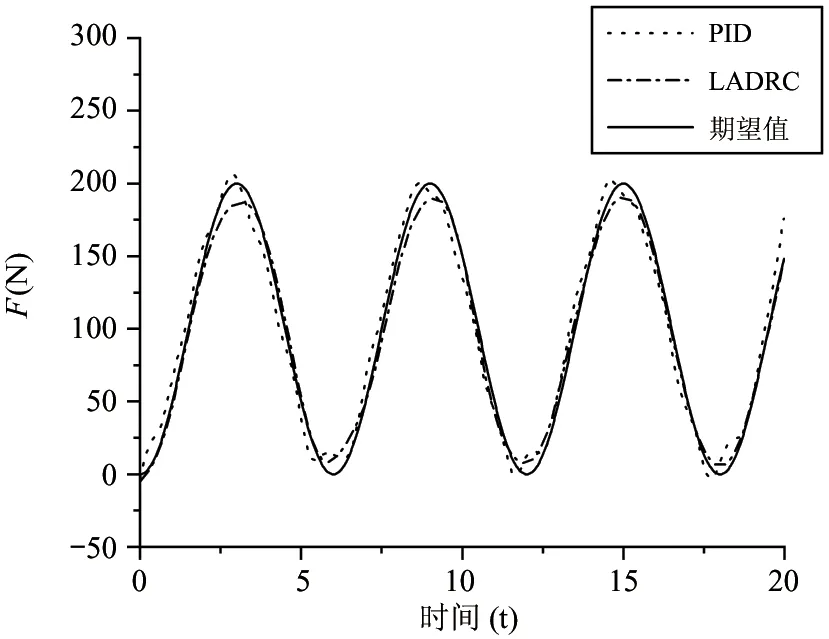
图9 正弦波加载时试验载荷跟踪响应曲线

图10 正弦波加载时试验载荷跟踪误差曲线
谷期发生抖动现象,故LADRC算法控制的载荷跟踪效果更加平滑稳定,在跟踪误差曲线上可以看出LADRC控制的正弦波加载误差量更小,且在PID算法控制的载荷误差范围之内。
2.1.3 锯齿波加载
图11、图12分别给出了采用PID及LADRC控制的试验载荷幅值F=200 N、周期T=6 s的锯齿波条件下试验载荷跟踪响应曲线及误差曲线。由于
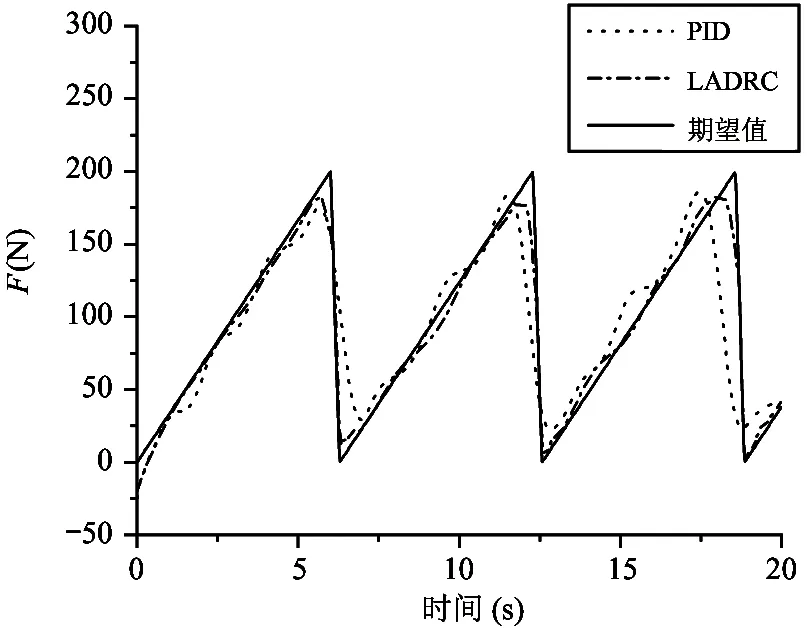
图11 锯齿波加载时试验载荷跟踪响应曲线

图12 锯齿波加载时试验载荷跟踪误差曲线
锯齿波相对正弦波变化速率加大,且存在尖端载荷突变的情况,对载荷的精确控制难度加大。由图中可知,2种控制算法控制的载荷都可以跟踪上期望值,但PID算法控制的载荷滞后现象比较严重,尤其在锯齿波载荷突然下降的阶段之后现象比较明显,且LADRC控制的载荷跟踪效果更加平滑,误差量更小,尤其在突变点LADRC算法的载荷跟踪误差量更小。
2.2 加载试验
为证明LADRC的抗干扰能力,本文将启动电动变载荷摩擦磨损试验机平台的样品台传动系统,将下式样固定在样品台传动机构上,上试样固定在加载机构的摩擦压头上。样品台将通过伺服电机在传动机构的带动下以50 r/min的转速进行顺时针旋转。上试样将在电动缸的推动下将试验载荷施加于下样品上,并通过力传感器实时测量加载力,以此来模拟样品台传动系统对电动加载系统的外界干扰。
相比于空载试验,加载试验中由于存在强干扰,2种控制算法控制的载荷跟踪响应曲线抖动情况更加严重,控制难度加大,而LADRC控制算法会表现出优越性。
2.2.1 恒值加载
图13、图14分别给出了采用PID及LADRC控制的试验载荷F=200 N的恒值条件下试验载荷跟踪响应曲线及误差曲线。由图中可知,在试验载荷为200 N的条件下LADRC控制下的载荷跟踪响应曲线震荡更小,稳态误差更接近于0且控制响应速度要快于PID。

图13 恒值加载时试验载荷跟踪响应曲线

图14 恒值加载时试验载荷跟踪误差曲线
2.2.2 正弦波加载
图15、图16分别给出了采用PID及LADRC控制的试验载荷幅值F=200 N、周期T=6 s的正弦波条件下试验载荷跟踪响应曲线及误差曲线。由图中可知,LADRC控制效果更稳定,误差量变化幅度更小,尤其在波峰波谷处跟踪更加平滑。
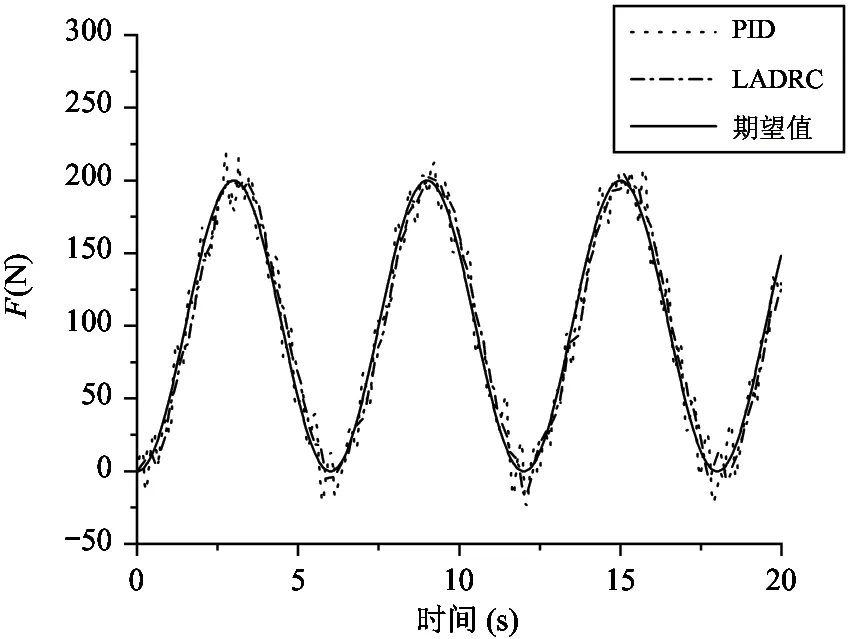
图15 正弦波加载时试验载荷跟踪响应曲线
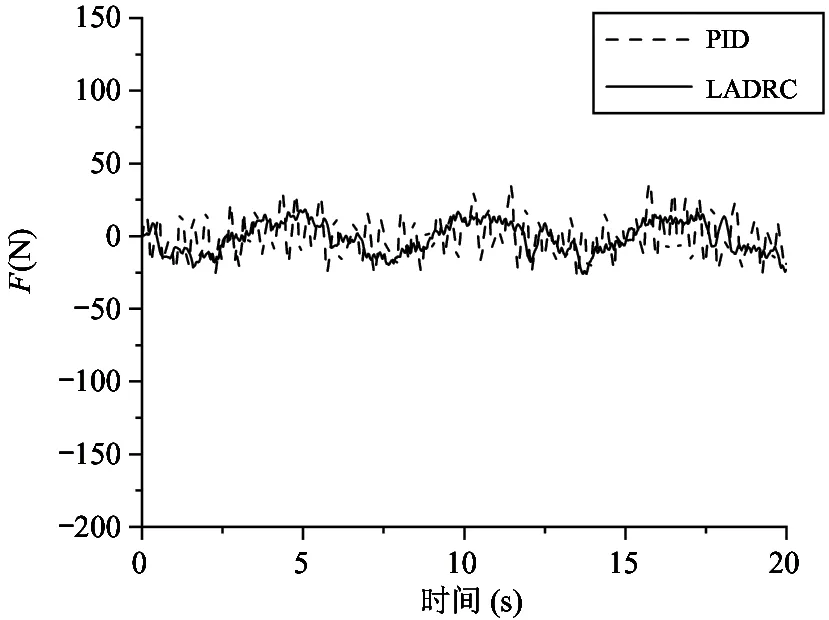
图16 正弦波加载时试验载荷跟踪误差曲线
2.2.3 锯齿波加载
图17、图18分别给出了采用PID及LADRC控制的试验载荷幅值F=200 N、周期T=6 s的锯齿波条件下试验载荷跟踪响应曲线及误差曲线。锯齿波加载控制难度相对较大,由图中可知,LADRC算法控制的试验载荷跟踪更加稳定,尤其在突变点误差量更接近于0。
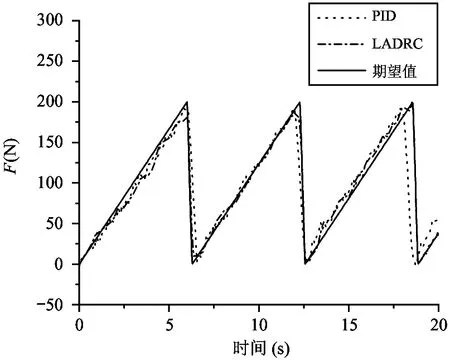
图17 锯齿波加载时试验载荷跟踪响应曲线

图18 锯齿波加载时试验载荷跟踪误差曲线
3 结 论
为弥补现有的摩擦磨损试验机的单一加载形式难以模拟空间微重力条件下机构活动界面相对位置保持高度的随机性运动行为的缺点,改善气动加载系统需要空气压缩机为其提供动力源,及存在着气体可压缩性、流动状态的复杂性、比例阀的时滞性等缺点,本文设计了一种电动变载荷摩擦磨损试验机。通过数学建模得到电动加载系统的数学模型,从工程应用角度出发,针对电动缸驱动的变载荷摩擦磨损试验机压力控制系统在加载过程中存在系统参数变化以及外部干扰等不确定性干扰因素情况,设计了一种线性自抗扰控制算法,并在电动变载荷摩擦磨损试验机平台上进行了验证。基于Qt 4.3.1的开发环境,采用C++语言设计了实时控制程序,选取恒值、正弦波、锯齿波3种典型加载信号,通过LADRC与PID控制算法分别进行了空载及加载试验。结果表明,LADRC跟踪效果更好,响应速度更快,控制精度更高,尤其在加载试验中虽然都出现抖动现象,但是LADRC跟踪响应曲线波形更加平滑,跟踪误差更小,表现出更强的鲁棒性。
猜你喜欢
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
哈尔滨轴承(2021年1期)2021-07-21
微特电机(2020年11期)2020-12-30
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年1期)2020-11-03
中学生数理化·中考版(2019年10期)2019-11-25
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
中学生数理化·中考版(2017年10期)2017-04-23