基于脑电疲劳监测的车辆避撞预测模型研究 ①
2020-08-11 01:42:58任金龙潘韫杰杨帮华
高技术通讯 2020年7期
任 彬 任金龙 潘韫杰 杨帮华
(上海大学机电工程与自动化学院 上海市智能制造及机器人重点实验室 上海 200444)
0 引 言
近年来,随着我国经济的高速发展,越来越多的人驾驶汽车出行导致交通事故频繁发生,每年交通事故导致大量人员死亡和受伤。如何减少事故发生,是亟待解决的研究问题[1,2]。因此,各种防撞预警系统的研究工作开始了。通过车载设备实时获取道路车辆的运动状态信息,当出现危险时采用车辆的防撞预警算法及时提醒驾驶员采取相应措施来达到降低事故发生的目的[3,4]。现代人过着快节奏、快速度的生活,高强度用脑让人们很容易进入脑力疲劳的状态,人们的工作效率会降低,更加严重的后果是可能会因此引起安全事故[5]。驾驶员疲劳驾驶问题已受到世界各国越来越多研究人员的关注,其中针对疲劳驾驶检测方法而进行的研究具有现实意义[6]。事实上,连续驾驶、单调的驾驶环境都会引起驾驶员的疲劳,致使驾驶员注意力分散、打瞌睡、操作能力降低[7]。从医学的角度来看,某些生理特征,如眨眼、心跳、血压、脑电波等生理信号的变化可以反映驾驶员疲劳的程度。通过专门的仪器测量这些生理信号,可对驾驶员的疲劳进行监控,从而有助于减少交通事故的发生[8]。
国内外学者针对车辆安全预警进行了大量研究。Yu和Li[9]研究了车辆弯道防侧翻预警算法,在驾驶模拟试验台对该算法的有效性进行了验证。郭烈等人[10]结合安全车速和车辆运动学模型,设计了直道制动减速阶段的速度控制器。Benamar等人[11]提出基于预定碰撞时间(time to collision,TTC)阈值确定模型。于广鹏等人[12]提出基于纵向防撞时间的纵向碰撞预警/防撞算法。传统的预警算法模型设定固定的时间阈值,当车载设备实时检测到的碰撞时间达到这个固定阈值区间时才会给驾驶员提供预警信息。但是实际的交通道路环境和车况复杂多变,车辆的安全防撞时间也会不同。因此固定阈值防撞模型的安全防撞可靠性得不到保障[13,14]。
为了解决疲劳驾驶和预警误差问题,本文提出了基于脑电信号疲劳时间的防撞计算模型。该模型结合脑电实验分析,对比安全碰撞时间与特定情况下的实际碰撞时间。考虑到人短暂集中注视前方时,大脑会出现疲劳现象,对实际计算模型添加脑疲劳的节律能量影响因数作为修正,实现脑疲劳和预警误差带来的双重保障。从安全驾驶的角度,模型检测到危险时立即发出预警并采取制动措施,可有效降低驾驶员在紧急情况下不能及时应对突发事件而导致的负面效果。
1 疲劳驾驶的脑电信号实验分析
脑电信号按频率可分成δ波(0.5~4 Hz)、θ波(4~8 Hz)、α波(8~13 Hz)、β波(13~30 Hz)和γ波(30~60 Hz)5种波[15]。通常仅需要前4种节律波就可研究人脑疲劳状态。δ波和θ波的出现表示大脑处于受压抑制状态,α波和β波的出现表示大脑处于较清醒或兴奋状态。可以使用4个波形作为疲劳程度的指标,α波和β波的能量数据减少,说明人的疲劳程度增加;δ波和θ波的能量数据增加,也说明人的疲劳程度在增大[16]。
一般情况下,当驾驶员注意力高度集中地注视前方道路时会存在短暂性脑疲劳。用于采集头皮表面脑电波(electroencephalogram,EEG)的系统,只需将其电极端接触头皮表面就能采集脑电信号。基于EEG信号的脑机接口技术(brain computer interface,BCI)系统通过电极导联和蓝牙通信将采集到的脑电信号传至计算机。计算机中记录下实验所需要的脑电信号后,通过回放对实验数据进行整合,最终用于实验分析。以上是脑电采集实验的主要流程。软件导出的数据包括4个波所占能量的百分比,然后需要单独整理某个导联的数据并进行分析。实验模拟环境如图1所示。

图1 实验模拟环境
本文选用的电极是海绵-盐水电极,也就是湿电极。传统的湿电极使用导电膏电极来测量脑电。2者都采用金属电极。该种电极通常由锡(Sn)、银/氯化银(Ag/AgCl)、金(Au)或铂(Pt)制作而成。通过比较各个金属电极的材料和使用性能,本文选择使用Ag/AgCl电极。本文用1个电极帽将海绵-盐水电极固定在头皮表面,保持电极接触头皮且位置正确。图2为头皮脑电信号采集原理图,电极帽可以按照头部形状进行调节,实验时需要保证电极和受试者头皮的贴合程度较高。选用的电极是可以与之配合固定的电极,电极尾端由导线连接到脑电信号放大器上。放大器具有模拟输出功能,或集成一个模/数转换单元。当其用于人体脑电信号记录时,可保证其安全性,如图2所示。
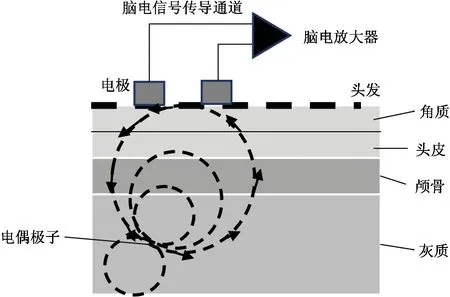
图2 头皮脑电模型采集原理图
选取年龄为20~50岁、身体健康、驾龄为0~10年、清醒或疲劳的男性实验者(部分实验者没有驾驶经历),在疲劳驾驶实验平台上进行模拟驾驶实验多次,以确保数据稳定可靠。本次集中注视实验需要实验者保持精神高度集中,在此过程中不能眨眼,以达到真实疲劳状态,采用单级导联法,测量实验者的脑电信号分析实验结果。
实验环境通风良好,光线正常,隔音良好,房间内尽量避免出现电源或其他干扰性信号。首先,让受试者选择最舒适的姿势固定,尽量在实验中不要产生身体摆动,且尽量避免眼睛眨动引起的眼动信号干扰(少量干扰可忽略不计),整个过程双手不能动,双眼注视模拟驾驶视野的前方。然后,操作者开始监控受试者脑电信号,在确定信号平稳之后,播放“滴——”提示音,此时受试者开始集中注视实验。脑波信号变化的实验数据被完整记录在计算机中,以便数据处理。本文选用的脑电采集硬件装置包括1个脑电信号放大器、1个蓝牙接收盒、1组采集头皮脑电的电极及其配套的导线、2种型号的电极帽和计算机,如图3所示。
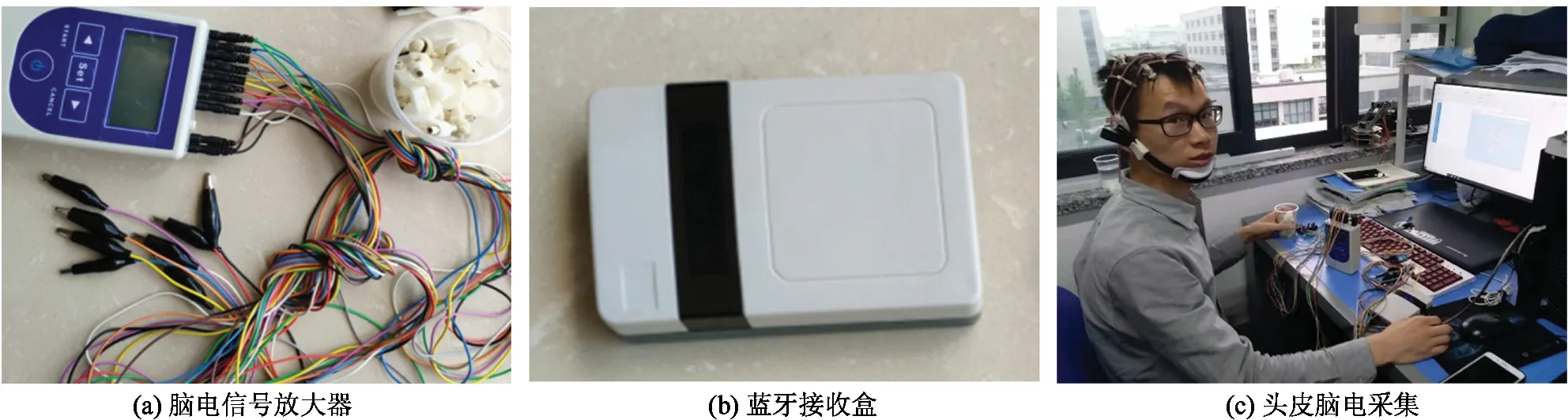
图3 实验设备和实验者实景
其中,单极导联法是通过国际10-20标准导联方式来采集EEG信号。这些标准电极放置方法的基础是定义头骨地标(如鼻根和枕骨隆突)的轮廓,并把所得轮廓按照成比例的距离进行分割。标准10-20系统采用的比例距离为头骨地标之间轮廓长度的20%,由于本实验采用的是16个不同的电极,每一边头皮的电势Vx都以同边耳垂作为参考进行记录(Vx-VEar1),另一半边头皮的电势也同上法记录。也就是说,课题中采集的脑电信号,可分为左脑电信号和右脑电信号。
本次实验数据预处理过程中,采用Excel来整合各个导联。软件数据导出包括4个波的能量值和所占能量百分比,需要单独整理某个导联的数据进行分析。在Excel中将所有数据都整理完之后,根据导联不同划分表格,每个导联表格中必须包括每个频率波形的能量值、每导能量百分比值和导联间能量占比。本文使用每导能量百分比,对比4个波形能量占比,来评估受试者脑电疲劳状态。实验数据处理后的4种脑电波的每个导联能量百分比的变化趋势,如图4所示。
本实验截取前16 s数据,横坐标表示时间,纵坐标表示不同的脑电波每个导联在一定时间内的幅值能量百分比。如图4所示,δ波和θ波的拟合曲线随着时间变长,其能量占比也缓慢上升,在8 s左右时能量幅值百分比有明显的增加,说明人脑开始处于疲劳状态。而α波能量占比曲线则呈下降趋势,在7~8 s时能量幅值百分比有明显下降,β波的曲线趋势变化不大,但是整体能量幅值在减小。通过曲线分析可以看出,在集中注视实验的过程中,实验者从慢慢进入精神集中状态到慢慢脑疲劳,导致注意力开始下降,实验者开始有些疲惫困顿,在8 s左右时实验者开始处于较为明显的脑疲劳状态,在此后时间,疲劳状态显著加重。
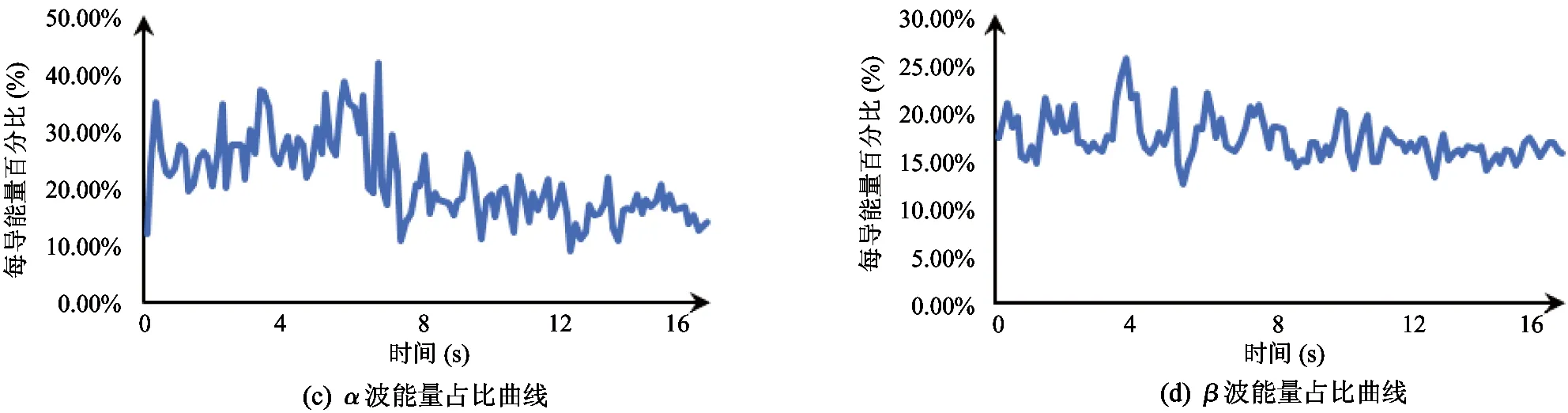
图4 4种波能量占比曲线
本文通过人脑疲劳的脑电信号,对大脑疲劳影响因素进行实验分析。在此基础上可引入节律能量值,建立脑电疲劳监测的车辆碰撞预测模型,修正传统的安全碰撞时间。建立的脑电监测的预测模型如图5所示。

图5 脑电监测的预测模型框图
2 两车冲突防撞计算模型
车辆行驶轨迹具有方向性,因此需要采用矢量方法来建立模型。不同的车辆外形尺寸会使获得的TTC值和车辆位置信息不同[17]。例如,将车辆假设为圆形实体可检测到2车即将发生碰撞;假设成质点不一定检测出潜在的碰撞,而将车辆假设成其他形状会使得计算比较困难,所以将车辆假设为圆形,在预警系统的帮助下,驾驶员可大大降低碰撞危险并提高驾驶的安全性能。下面将车辆简化为以(x,y)为质心的圆形模型,如图6所示。


图6 将车辆等效为圆形区域时车辆的碰撞示意图
由于驾驶员处于疲劳状态时,δ波、θ波、α波、β波4种节律波的信号会发生不同程度的变化,如图4节律能量百分比曲线所示。因此,本文引入了节律能量值G(t),它是不同波形在特定频率范围内的积分值,可以用来衡量大脑的疲劳程度,并将它作为计算模型检测驾驶疲劳的参考因子。
假设t1和t2分别为车辆1和车辆2到达冲突位置的时间,v1和a1分别为车辆1当前时刻的速度和加速度,v2和a2分别为车辆2当前时刻的速度和加速度,L和W分别为车辆的长度和宽度,fu为频带的上限,fd为频带的下限,p(t)为信号的能量谱百分比,G(t)为节律能量值。发生冲突时有:
=L+W+G(t)
(1)
式中,
可以推出:


=(R1+R2+G(t))2
(2)
若t1=t2,则t为冲突碰撞时间,可由式(2)求解。
综合实验者实验前后的自我疲劳评价及实验驾驶模拟对实验者的疲劳状态对节律影响因素G(t)进行主观评测。主观评测中将疲劳等级划分为4级,即清醒、轻度疲劳、中度疲劳、重度疲劳。以5 min为周期分析实验者的模拟驾驶实验视频,记录实验者的眼球转动、眼皮闭合、打哈欠、头部运动等状态特征。根据表1内容,对实验者的疲劳状态进行评价,综合实验者的自我评价,确定实验者的疲劳状态。

表1 疲劳主观评测表
对实验者的实验结果进行分析,综合实验者的疲劳自我评价以及实验者的眨眼频率、面部表情等因素,对应的实验者的主观疲劳评测为清醒-轻度疲劳-清醒-轻度疲劳。实验者相应的脑电G(t)值的变化曲线如图7所示。

图7 G值变化曲线图
对比之前4种节律波的脑电疲劳分析结论,从图7可知,人脑疲劳状态发生了变化,脑电G(t)值从实验初期的0.78逐步增大至实验中期的1.31,其中1.31为前半部分的均值,在前1/4的时间,脑电G(t)值基本维持在1.31以下;随着实验时间的延长,在2/4时间阶段,脑电G(t)值又继续上升,并基本维持在1.31以上,表明实验者进一步疲劳;在3/4阶段逐渐趋近于1.81线,1.81为后半段的G值均值,表明其疲劳程度继续增加;在实验最后1/4时段,脑电G(t)值基本超过1.81值,表明疲劳程度增大。由于在4~12 s之间存在过渡疲劳变化,则过渡段的G(t)值取2者均值的平均值,即为1.56。从以上分析可知脑电G(t)值的变化曲线与主观疲劳评测的变化一致,可以认为G(t)<1.3对应实验者的清醒状态;1.3≤G(t)<1.56 对应实验者的轻度疲劳状态;1.56≤G(t)<1.8对应实验者的中度疲劳状态;G(t)≥1.81时对应实验者的重度疲劳状态。
在疲劳驾驶测试平台上进行模拟驾驶实验。采集实验者的脑电信号,分析脑电信号能量谱的时间变化特征,并对实验者进行驾驶疲劳综合主观评价。对比分析主观评测结果和脑电信号变化特征,证明主观疲劳综合评测结果与脑电G(t)值的变化相对应,脑电G(t)值能够定量描述驾驶疲劳状态,脑电G(t)值越大,驾驶疲劳程度越高。
两车相撞时车距大约为1个车长,一般车辆的长度为4~6 m,宽度为2~2.5 m,同时考虑到人脑疲劳因素迟滞,故上述表达式中分别取L=2 m,W=3 m。当2车距离S≤(L+W+G(t))时,将车辆发生碰撞的时间与安全防撞的时间进行比较,判断是否存在碰撞危险。一般情况下,由于正常行驶中的车辆处于匀速运动状态,取a1=a2=0 m/s2。
由于车辆冲突时间受到车速的影响,故分别在低速、中速、高速等多种情况下讨论车辆冲突时间。设定车辆的低速为10~30 km/h,中速为30~60 km/h,高速为60~90 km/h。图6建立了车辆运动坐标系,其中R1(30,20),R2(10,50),φ1=60 °,φ2=25 °。R1、R2为2车的初始中心位置,φ1、φ2为2车的航向角。将分别处于低、中、高速下的2车碰撞计算模型进行理论计算,得出碰撞时间。下一步将理论计算所得碰撞时间与实时监测的安全防撞时间对比,从而进行仿真实验。
3 不同情况下的车辆碰撞时间
3.1 车辆都为低速
设定车辆的车速分别是v1=30 km/h,v2=30 km/h,按照图6的模型分析实际情形,距离比例为1 m/mm,由已知条件,可得2车到各自碰撞点的坐标R1′(69,66),R2′(66,70)。车辆的冲突碰撞距离:
(3)
带入坐标值得S1=66.67 m,同理得到S2=66.67 m,2车冲突碰撞的理论时间为
(4)
带入数值得t0=8 s。
为了确定模型的精确性,通过式(2)进行碰撞时间计算,在误差允许的范围5%内即可。将已知数据代入公式得:
(30+6t×cos50°-10-6t×cos(19°))2+
(20+6t×sin50°-50-6t×sin(19°))2
=(R1+R2+G(t))2
化简得t=8.282 s。
验证误差范围(8.282-8)÷8=3.6%<5%,成立。
故此状态的车辆碰撞时间t1=t2=t=8.282 s。
3.2 车辆都为中速
设定车辆的车速分别是v1=60 km/h,v2=60 km/h,按照图6的模型分析实际情形,距离比例为1 m/mm,由已知条件,可得到2车到各自碰撞点的坐标R1′(131,108),R2′(128,112)。车辆的冲突碰撞距离为
(5)
带入坐标值得S1=133.3 m,同理得到S2=133.3 m,2车冲突碰撞的理论时间为
(6)
带入数值得t0=8 s。
为了确定模型的精确性,通过式(2)进行碰撞时间计算,在误差允许的范围5%内即可。将已知数据代入公式得:
(30+11t×cos41°-10-11t×cos27°)2+
(20+11t×sin41°-50-11t×sin27°)2
=(R1+R2+G(t))2
化简得t=8.338 s。
故此状态的车辆碰撞时间t1=t2=t=8.338 s。
3.3 车辆都为高速
设定车辆的车速分别是v1=90 km/h,v2=90 km/h,按照图6的模型分析实际情形,距离比例为1 m/mm,由已知条件,可得到2车到各自碰撞点的坐标R1′(193,137),R2′(190,141)。车辆的冲突碰撞距离:
(7)
带入坐标值得S1=200 m,同理得到S2=200 m,2车冲突碰撞的理论时间为
(8)
带入数值得t0=8 s。
为了确定模型的精确性,通过式(2)进行车辆碰撞时间计算,在误差允许的范围5%内即可。将已知数据代入公式得:
(30+16t×cos36°-10-16t×cos28°)2+
(20+16t×sin36°-50-16t×sin28°)2
=(R1+R2+G(t))2
化简得t=8.266 s。
故此时车辆碰撞时间t1=t2=t=8.266 s。
同理得出,2车在低-中速、中-高速、低-高速情形下,计算得出的结果也在8 s左右,这个模型恰好可以在人脑疲劳情形下起到可靠预警的作用,防止因驾驶员主观因素操作不及时而发生碰撞的危险。
4 VISSIM下的仿真试验及结果分析
4.1 仿真实验
本仿真实验通过VISSIM8.0微观交通仿真软件搭建上述6种情形的现实交通场景[18-21],以VISSIM中的路网、车辆等组件完成交叉口模型的搭建[22]。分别设定车辆的不同速度,通过外部驾驶员模型控制车辆运动状态,通过VISSIM中封装好的函数记录车辆的实际碰撞时间,并通过VBA调用车辆相关信息,以数据库形式将数据导入表格中做数据统计分析[23,24]。
仿真实验有6组情形,分别对应上述6种预定模型,6组车辆分别对应表格中车1和车2的低速、中速、高速,速度情况按上述区间内取值即可。为了保证实验准确性,实验中每种情况统计了175次,同一速度档内速度值不变,以便于统计分析实验结果,在交叉路口通过仿真软件统计车辆的真实运动状态。统计不同方法发生的碰撞率来评估2种模型性能。当车辆的行程碰撞时间小于或等于安全避撞时间时,提醒驾驶员及时采取制动措施,以避免相撞。固定阈值模型则通过外部驾驶员模型设定车辆在3~5s之间采取制动措施。
4.2 仿真结果分析
仿真后的统计结果如表2所示。通过降低车辆的碰撞率,可以有效解决预警过早或者过晚带来的交通问题。在低-中、低-高、中-中、中-高情形下,本文方法基本没有发生碰撞,仅在中-高情形下存在4.0%的碰撞;而TTC固定阈值法在以上情形下有发生碰撞的概率,最高达28.0%;高-高情形下本文所提避撞模型发生了9.7%概率碰撞,TTC固定阈值法的碰撞率高达46.9%;在2车都为高速时车辆碰撞数增多,是因为驾驶员需要的反应时间不足,测量的安全防撞时间误差偏大。对比可知,本文所提出的避撞模型可以让驾车安全性得到显著提高,有效降低交通事故发生的可能性。
从表2也可以看出,当车1和车2的速度都为低速时,均可以实现车辆避撞的目的;其后几种情况固定阈值方法预警防撞效果明显减弱,碰撞率较高,防撞性能不可靠,尤其在高速行驶情况下发生碰撞的次数变多,原因是固定阈值模型有效预警区间为3~5 s,当它的安全避撞时间比这个时间短时,就会出现预警过晚的情形,导致避撞失效。另一方面,实际情形中当车速超过一定速度时,固定阈值模型在行驶过程中无预警提示,预警失效从而发生碰撞。
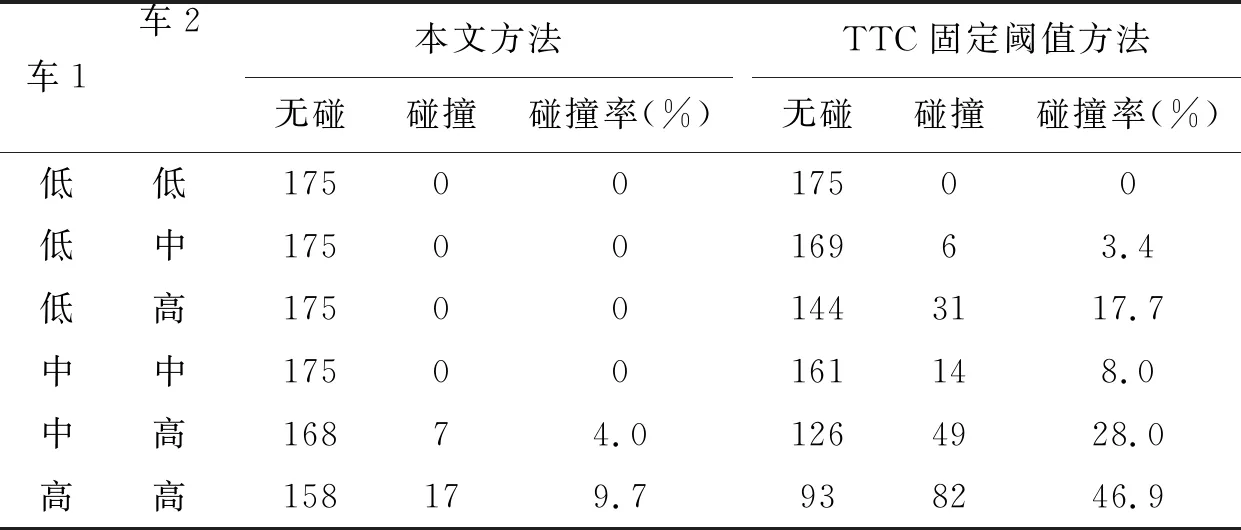
表2 本文方法与TTC固定阈值方法结果
5 结 论
针对因人脑疲劳导致驾驶员注意力不集中从而造成操作不及时导致交通事故的情况,本文提出了基于脑电疲劳的预警避撞模型,并在不同车况条件下,将实时更新的安全防撞时间和实际碰撞时间进行比较,并发出预警信息。考虑到驾驶员大脑疲劳,对实际情形的安全碰撞时间进行了修正,以达到避撞目的。在传统阈值模型基础上,进行交叉路口仿真实验,验证了该模型的避撞性能和可靠性。实验结果证实了考虑脑电疲劳时间的车辆避撞模型在预警避撞性能上更加稳定可靠,提高了车辆驾驶安全性。本文主要结论如下:
(1)考虑驾驶员脑疲劳因素带来的驾驶安全问题,通过脑电模拟实验,分析了脑电信号变化趋势。
(2)建立驾驶员疲劳状态的避撞模型,在避撞计算模型中引入脑电节律能量值,将模型的理论避撞时间与驾驶员疲劳因素有效结合起来。
(3)仿真实验证明,考虑脑电疲劳的碰撞预测模型可避免预警时间过早或过晚的问题,能够让驾驶员有足够的时间和注意力采取制动措施,从而降低车辆的碰撞率。
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22 07:44:40
临床医药文献杂志(电子版)(2020年31期)2020-07-23 05:49:38
临床医药文献杂志(电子版)(2020年14期)2020-06-24 03:33:48
少年博览(阅读与写作)(2020年4期)2020-04-28 06:22:55
科技传播(2019年24期)2019-06-15 09:29:28
北京航空航天大学学报(2017年9期)2017-12-18 07:12:22
现代电生理学杂志(2016年3期)2016-07-10 12:10:32
现代电生理学杂志(2016年4期)2016-07-10 12:02:17
现代电生理学杂志(2016年1期)2016-07-10 10:20:58
爱你(2016年18期)2016-04-10 09:38:58