
独立绕组供电变流器过分相不间断供电技术研究
2020-08-03 08:25胡景瑜徐广伟刘建城罗文广
控制与信息技术 2020年3期
胡景瑜,徐广伟,刘建城,罗文广,彭 赟
(1. 中车株洲电力机车研究所有限公司,湖南 株洲 412001;2. 中车青岛四方机车车辆股份有限公司,山东 青岛 266111)
0 引言
我国电力机车及动车组由于辅助变流器(简称“辅变”)和列车供电(简称“列供”)系统拓扑结构多样,如HXD1C,HXD3C型机车及CRH2型动车组均采用主辅分离式拓扑结构,其辅变或列供系统均由牵引变压器独立绕组供电。过分相过程中,由于辅变与列供系统断电时间长,辅变负载与各类接触器频繁通断,导致接触器使用寿命降低;蓄电池频繁充放电,导致其故障频率升高。因此,辅变与列供系统过分相不间断供电功能需求日益强烈,解决方案有两种:(1)对供电网及供电线路进行改造;(2)对列车控制策略与硬件进行改造。文献[1]提出了同相供电方案,其可实现牵引供电网的全线贯通供电,取消电分相,列车不存在过分相工况。文献[2]提出了增加过分相装置来为列车在无电区持续供电,可实现列车不间断供电过分相。以上均属于对牵引供电网进行大规模改造与优化的方案,前期投入大,稳定性与可靠性有待验证。文献[3]提出通过控制牵引变压器一次侧电流来解决机车过分相时的过电压和过电流问题,但其采用的控制策略和硬件改造方式在实际应用中不易被实现。文献[4-6]提出了通过绕组之间电磁耦合方式实现不间断供电的方案,但方案中未涉及多控制单元协同控制、能量传导精确性控制及调幅与调相控制等相关关键控制技术;其次,对严重制约方案实施的车载牵引变压器谐振过电压问题并未提及,而该问题在实际应用中普遍存在且危害严重,亟须解决。为此,本文首先提出了一种适用于不同拓扑结构的独立绕组供电系统的过分相不间断供电方案,其可解决列车多控制单元间协同控制、能量传导精确性控制及调幅与调相控制等关键控制技术难题;其次,对车载牵引变压器分布参数与等效模型进行了分析,指出在过分相不间断过程中,谐振过电压是导致牵引变压器过电压的主要原因,并针对谐振过电压问题提出了多种可行性解决方案。
1 过分相不间断供电关键技术
国内现有车型电力机车牵引变压器牵引绕组与辅助绕组数量存在差异,且存在多个变压器并联供电工况,变压器绕组拓扑结构如图1所示。此外,因不同车型需求与设计理念不同,控制单元与绕组之间存在一对一或者一对多的关系,导致过分相不间断供电工况下的主电路拓扑结构也呈现多样化。因此,本文提出了一种适用于多种拓扑结构的普遍应用性解决方案。

图1 主辅分离式供电系统不同拓扑结构Fig.1 Different topological structures of independent auxiliary converters power supply system
1.1 多控制单元间协同控制及精确同步
文献[6]提出了一种依靠内部同步信号进行全车所有控制单元同步的控制方案,其同步性实现原理如图2所示。其中,CI为牵引变流器,LGU为列供变流器控制单元,APU为辅助变流器控制单元。
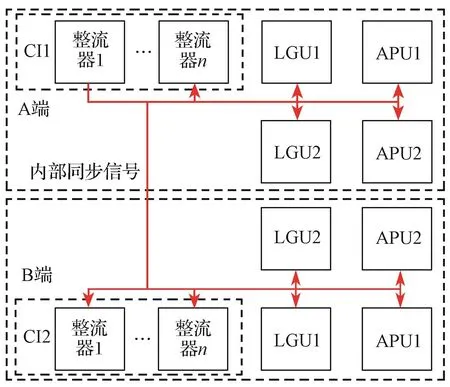
图2 列车同步性实现原理Fig.2 Schematic diagram of train synchronization realization
从图中可以看出,同步信号需要贯通列车A、B两端以接入各个控制单元,工程实现上有一定弊端:(1)同步信号跨越多个变流器柜布置,易受到整车强电磁干扰。由于同步信号属于精确性要求极高的信号,受到干扰会导致控制失稳,造成过分相不间断供电功能失败;(2)列车运行过程中振动及高低温均可对同步信号线造成损坏。此外,各种文献对于多控制单元协同控制研究仍停留在系统层面,缺乏相应的具体实现方案。
本文针对列车过分相不间断供电功能涉及的多样性拓扑及多控制单元协同控制的关键技术——精确同步技术,提出了普适性解决方案:
(1)全车无须同步互联线,由各控制单元增加同步性控制策略实现切换模式的精确同步,其原理如图3所示。
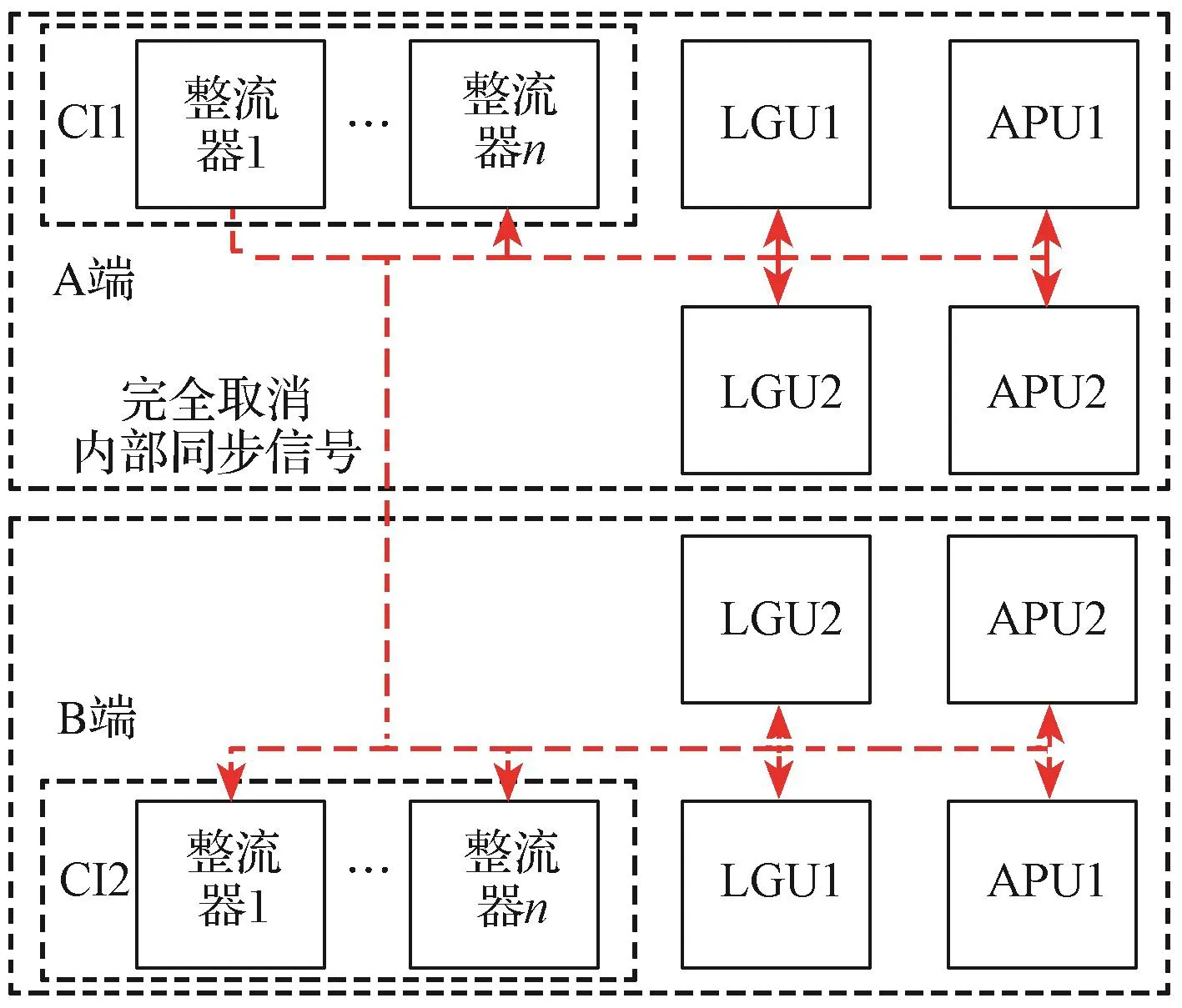
图3 列车所有单元采用无互联线方案Fig.3 Wireless scheme of all units in the train
(2)全车同步信号互联与无同步信号互联线方式相结合,同一变流器柜内二台或多台控制单元之间采用同步信号互通方式,距离较远的控制柜之间采用无同步信号互联方式,原理如图4所示,其中红色虚线表示无需互联线同步,红色实线表示采用同步互联线进行同步。
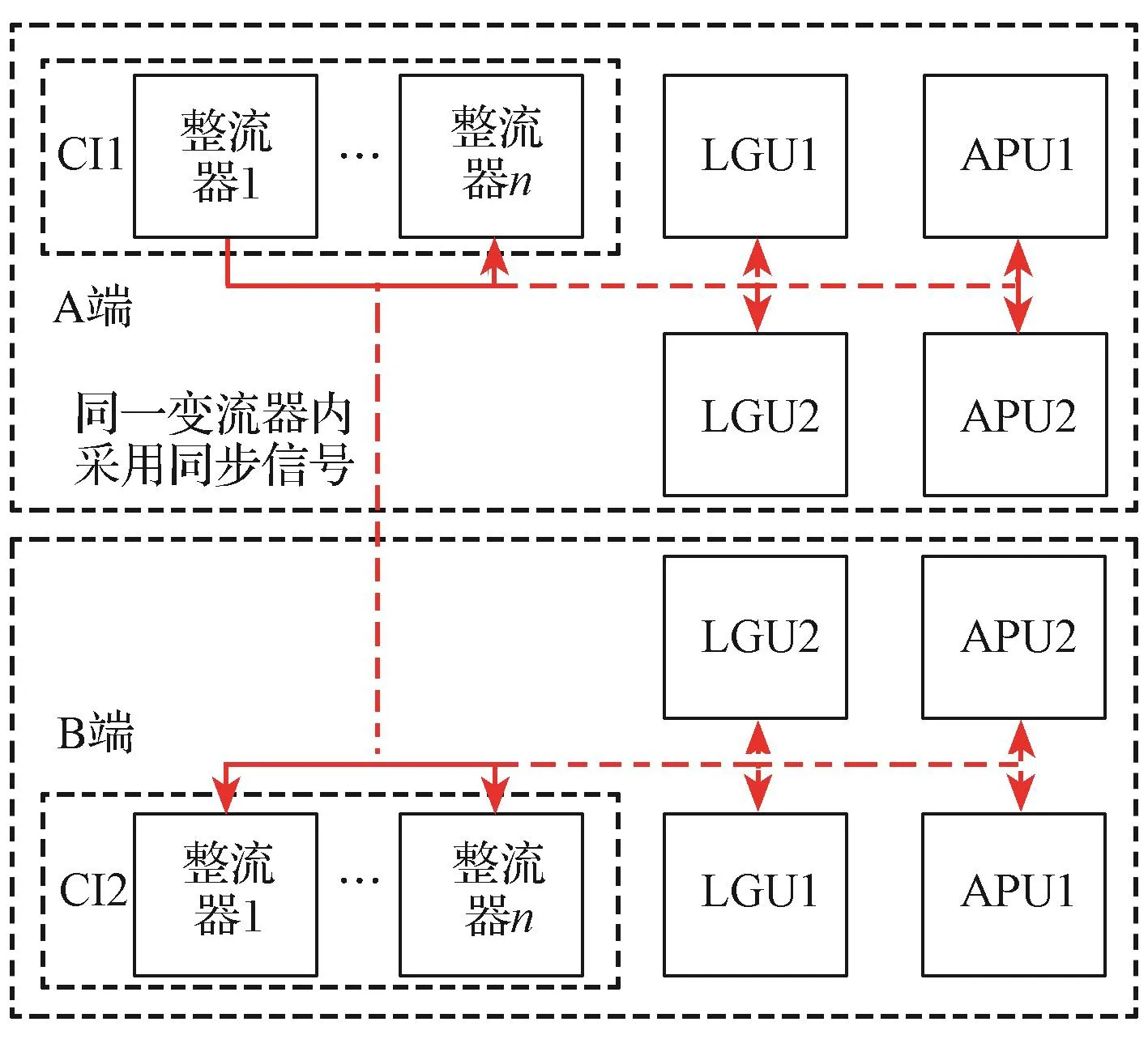
图4 列车部分单元采用无互联线方案Fig.4 Wireless scheme of some units in the train
采用同步互联线方案,以某一牵引绕组对应的控制单元为同步基准,将同步信号转换为硬线信号在柜内各控制单元之间进行传送。由于硬线传输延时基本可忽略,故控制单元间同步信号误差可被限制在10 μs以内,从而满足系统控制同步性要求。该方案的缺点是需要对系统进行硬件改造。
无互联线方案中,各控制单元以外部电压与电流条件作为判定依据,判断出同步时刻;从同步时刻起,各控制单元依靠自身高精度定时器进行同步,此功能可以由FPGA执行。测试结果显示,两控制单元采用自身定时器进行同步时,同步20 s累计误差约为12 μs,且累计误差与时间基本呈线性关系。由于过分相不间断供电功能有速度下限要求,且实际线路中分相无电区较短,因此,此方案可保证过分相无电区内各控制单元的同步性要求,方案控制原理如图5所示。

图5 无互联线方案原理图Fig.5 Schematic diagram of wireless scheme
1.2 能量传导精确性控制
列车运行至分相区前会接收到过分相预告信号;电机控制单元接收到过分相预告信号后,先进行快速力矩卸载,之后进入再生能量制动工况及过分相发电模式,以维持中间直流电压稳定。为避免切换过程中的中间直流电压突变,引入功率反馈调节环节,控制原理如图6所示。
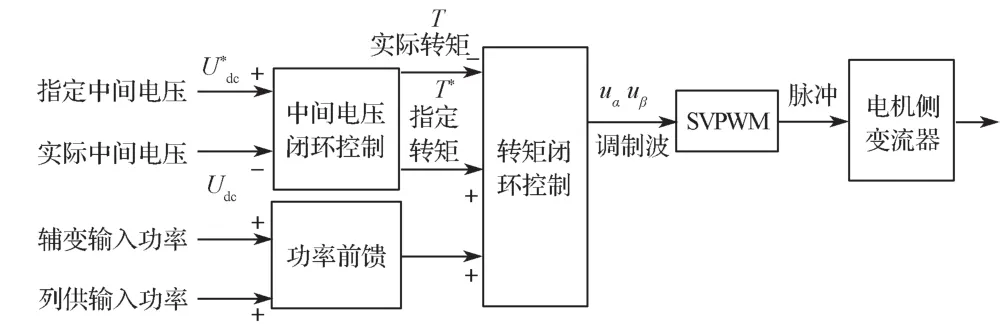
图6 直流电压控制框图Fig.6 Block diagram of DC-voltage control
列车接收到过分相预告信号后,网侧变流器由中间直流电压控制模式切换至孤岛系统电压控制模式。在过分相不间断供电功能实现中,牵引绕组充当整个供电系统电源,设定其系统同步电压为us,由于绕组之间存在等效电抗,如牵引绕组等效电抗电压为uL1、辅变或列供绕组等效电抗电压为uL2(图7),对辅变与列供变流器而言,其输入电压u′s的相位与同步电压相位之间存在角度差,即使各个控制单元同步性完全一致,也不能有效抑制系统无功功率,因此必须在控制中引入角度矫正环节以消除。
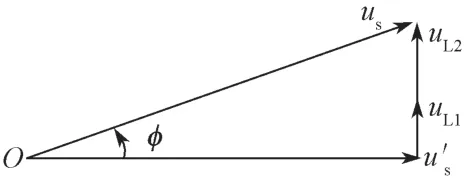
图7 电压矢量图Fig.7 Diagram of voltage vector
由于模式切换时刻需完全停止变压器与牵引网间的能量交换,因此将功率反馈引入到电流环控制中可确保辅变与列供绕组输出能量完全由牵引绕组提供。为确保辅变与列供控制简捷化,角度矫正环节在牵引变流器控制单元中实现,其控制原理如图8所示。其中,PAPU为辅助变流器功率,PLGU为列供变流器功率。
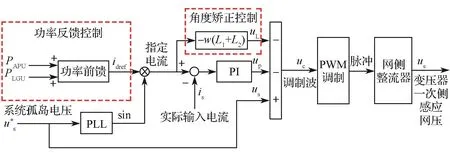
图8 牵引变流器控制框图Fig.8 Block diagram of traction converter control
1.3 电压调幅与移相控制
列车驶出分相无电区后转为由接触网B臂供电,各控制单元对B臂电压锁相完成后,开始进行列车孤岛系统电压移相与调幅控制。调整列车牵引变压器一次侧感应电压向B臂网压无级平滑过渡,实现列车系统电压相位与幅值由原A臂平滑移相至B臂,为主断路器闭合提供必要条件。
本文针对电压调幅与移相功能需求采用调幅移相控制策略,以B臂电压相位为基准、以B臂电压当前值在该坐标下的d轴和q轴分量为目标值、以列车孤岛系统电压在该坐标下的d轴和q轴分量为初始值进行调幅移相控制,控制原理如图9所示。控制过程中,为提高响应速度,可将单相电压虚拟为三相电压进行计算。
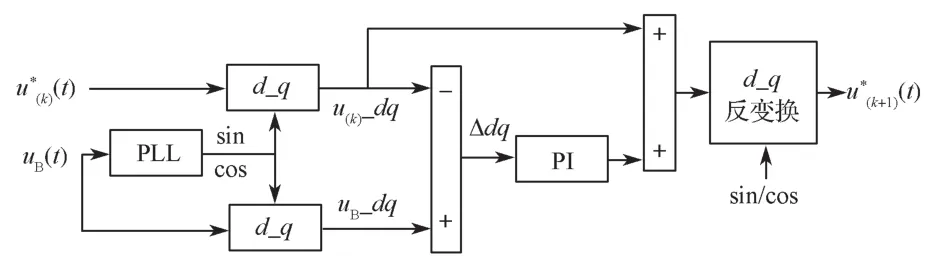
图9 调幅移相控制框图Fig.9 Block diagram of amplitude-phase control
2 变压器谐振过电压机理分析与问题解决
2.1 变压器谐振机理与谐振区间
车载牵引变压器按照工频设计,其分布电容参数在50 Hz工频工况下对机车影响不大,但在中高频工况下其影响则不能被忽略。列车正常牵引或制动工况时,牵引变压器一次侧与牵引网连接,引入较大感性阻抗,系统整体呈感性,中频区间并无谐振区段;但列车进行辅变与列供系统过分相不间断供电时,主断路器断开,变压器分布电容与变压器电感构成中频谐振回路,牵引变压器低压侧绕组整流采用PWM控制,其低压绕组侧等效为谐波激励源,因此牵引变压器高压侧存在谐振过电压风险,严重时可造成车载避雷器烧损及牵引供电网跳闸故障。
单相变压器等效分布电容参数模型如图10所示[7],其分布电容参数与变压器制造工艺以及其绕组结构强相关,同一型号变压器个体之间也会存在差异,不同型号变压器之间差异更大,对其谐振区间进行精确计算难度较大,工程上一般采用谐振法对其谐振区间进行测量。
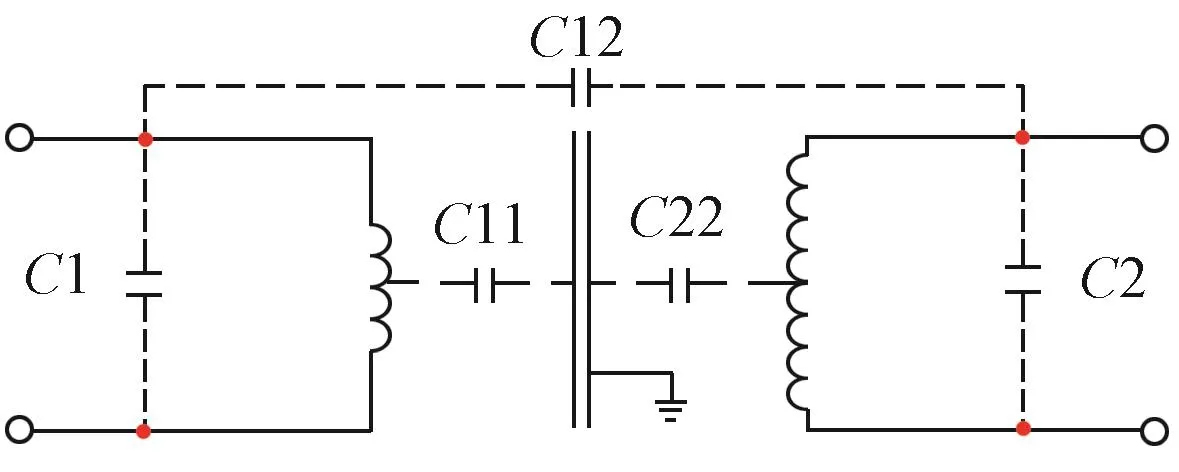
图10 变压器分布电容等效模型Fig.10 Equivalent model of distributed capacitors in transformer
变压器二次侧绕组输入工频基波并叠加不同频率谐波,以此作为激励源,通过此方案测试可以确定该型号牵引变压器谐振区间。对某款辅变与列供采用独立绕组供电车型的车载牵引变压器采用谐振激励的方式进行变压器谐振区间测试,其谐振区间为2~4 kHz,测试时变压器一次侧感应电压波形如图11所示。
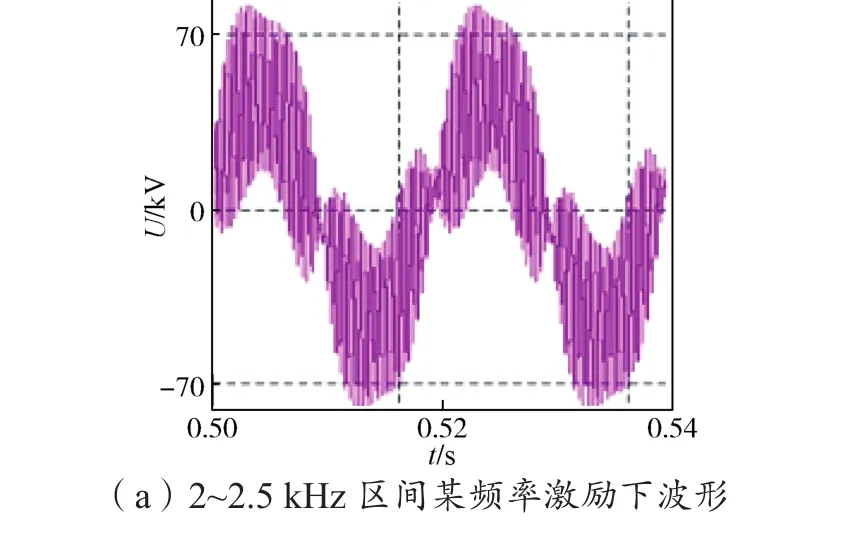
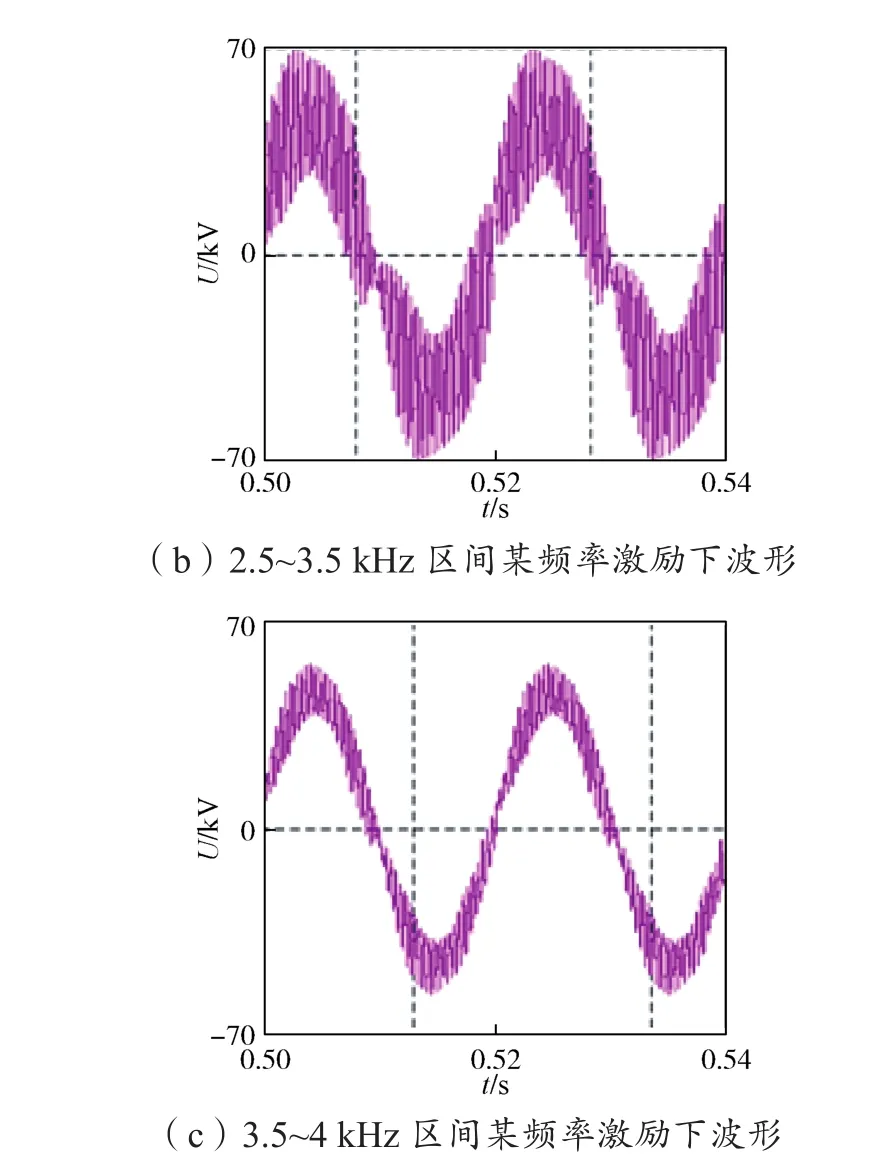
图11 基波叠加不同频率谐波激励时变压器一次侧电压Fig.11 Primary voltage of transformer under the excitation offundamental superimposed with different frequency harmonics
2.2 变压器谐振过电压问题解决
车载牵引变流器整流侧常采用单极性四象限控制策略,电压主要谐波分布在2倍开关频率及其倍频附近。由于变压器谐振测试结果显示牵引变压器谐振区段跨度较大,如果仅启动单重整流器且采用较低开关频率,其开关频率2倍频或多倍频附近谐波会分布在谐振区间从而引起谐振过电压。因此,针对车载变压器固有谐振区间引发的谐振过电压问题,本文提出两种解决方案:(1)过分相过程中列车启动单重整流器并采用高开关频率,需保证其开关频率的2倍频在4 kHz以上,即开关频率大于2 kHz;(2)过分相过程中列车启动多重牵引变流器,利用多重化载波错相的倍频效果,消除谐振频段内谐波,变流器控制开关频率可大幅降低。谐波源频率高于4 kHz后,变压器高压侧将不再发生谐振现象。试验中所测试的变压器一次侧感应电压波形如图12所示。
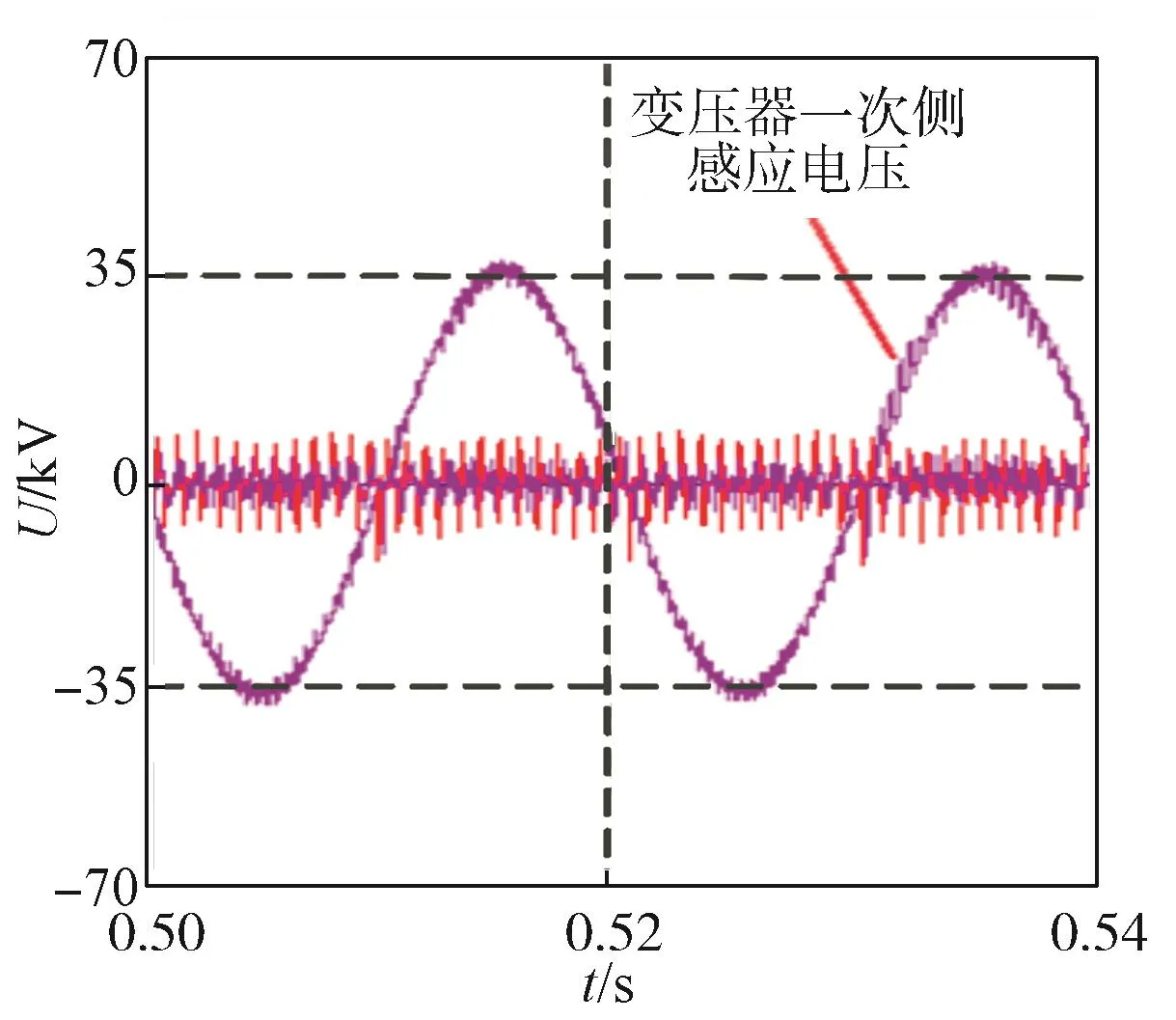
图12 避开谐振区间后变压器一次侧电压波形Fig.12 Primary voltage of transformer avoiding resonance interval
3 功能验证
地面试验模拟列车过分相不间断供电功能试验,单台辅变功率220 kW,单台列供电源功率230 kW,采用本文控制策略,实现43 km/h速度下两个牵引绕组通过绕组耦合方式实现单台辅变与单台列供满载过分相不间断供电。过分相不间断供电全过程可分为5个阶段,功能试验过程中牵引变压器一次侧感应电压与弓网实际电压如图13所示。
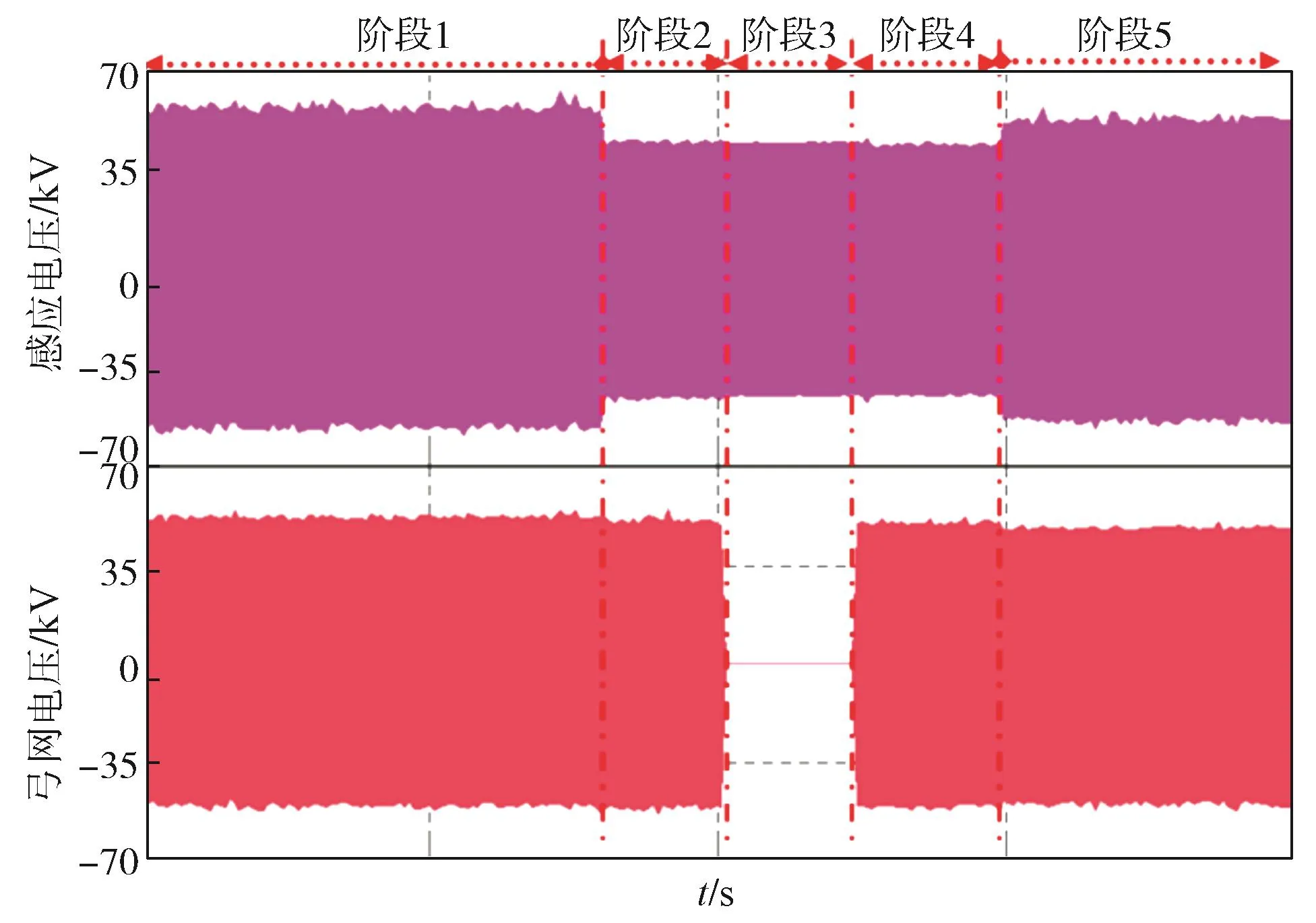
图13 过分相不间断供电功能全过程波形Fig.13 Voltage waveforms of transformer when the system adopts uninterrupted power supply technology
阶段1:列车接收到过分相预告信号,此时列车由正常牵引或制动控制模式向过分相不间断供电控制模式转换,主断路器处于闭合状态。
阶段2:列车过分相不间断供电控制模式切换成功,主断路器断开。
阶段3:列车驶入无电区,接触网网压信号消失,整车建立虚拟网压进行同步控制。
阶段4:列车驶出无电区,接触网网压信号恢复,列车各控制单元进行网压锁相与调幅调相控制。
阶段5:列车完成由过分相不间断供电控制模式向正常牵引或制动控制模式的切换,主断路器闭合,过分相不间断供电过程结束。
整个过程中有3个控制节点需要重点关注:(1)进分相区前主断路器断开前后;(2)分相区内;(3)出分相区后主断路器闭合前后。通过对3个节点波形分析确定,本方案实现过程中系统孤岛电压平稳,一次侧感应电压高精度采样值均小于46.8 kV,未超过避雷器动作电压59 kV,在正常值范围内,全过程没有出现过电压现象,能量控制良好,变压器谐振过电压规避效果良好,具体波形如图14所示。
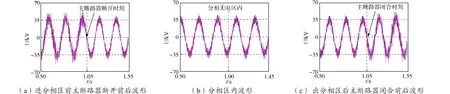
图14 3个关键节点前后变压器一次侧感应网压Fig.14 Primary induction voltages of transformer around the three critical moments
4 结语
针对列车采用独立绕组供电的辅变与列供过分相不间断供电功能需求,本文提出了一种具有普适性的系统技术解决方案,并进行了关键技术的开发与关键问题的解决研究。首先,基于动力集中动车组车载变压器与变流器试验条件,采用本文技术方案成功实现了辅变与列供过分相不间断供电功能,空载工况下变压器一次侧感应电压总谐波失真(total harmonic distortion, THD)可控制在5%以内,辅变与列供满载工况下变压器一次侧感应电压最大值可控制在46.8 kV以内,远小于避雷器动作电压。其次,对技术方案执行中面对的变压器谐振过电压问题进行了机理分析并提出了可行性解决措施,试验结果证明该解决措施能有效规避变压器谐振过电压。最后,针对该过分相不间断供电新增功能,后续新车型在方案设计初期可以考虑在车载主断路器与牵引变压器之间增加高压互感器,以实现功能的闭环控制,从而使可靠性与稳定性均可得到更好的保证。
猜你喜欢
热力发电(2022年4期)2022-04-30
河北农机(2021年12期)2022-01-06
建材发展导向(2021年19期)2021-12-06
风流一代·经典文摘(2021年7期)2021-08-09
铁道机车车辆(2021年3期)2021-07-12
现代职业教育·高职高专(2021年51期)2021-01-08
电子制作(2019年10期)2019-06-17
炎黄地理(2018年11期)2018-11-30
文苑·经典美文(2018年2期)2018-03-03
小雪花·成长指南(2016年1期)2017-02-13
