
我国深海作业级ROV技术现状及发展展望
2020-08-03 08:25晏红文
控制与信息技术 2020年3期
沈 克,严 允,晏红文
(上海中车艾森迪海洋装备有限公司,上海 201306)
0 引言
深海的科学考察和资源开发离不开先进的技术和装备。目前深海领域的科考和作业主要依赖于深海作业级遥控潜水器(remotely operated vehicle, ROV),其作业深度大、作业时间长,能够抵抗相对恶劣的海洋环境,被广泛应用于海洋地质和生物考察、海底光缆和管道的辅助铺设、深海救助和打捞、水下结构物的监测和检查等领域[1-4]。目前国内外针对深海作业级ROV的研究主要集中在动力传输、导航定位、通信、水下目标探测和识别以及整机系统的轻量化、自动化、智能化等方向,通过解决远距离动力传输和通信,提高导航定位精度以及整机系统的稳定性、灵活性和安全性,来最大限度地实现系统智能化。本文通过对深海作业级ROV国内外研究现状的分析,探讨了其关键技术的发展趋势,并对我国深海作业级ROV产业进行了展望。
1 深海作业级ROV系统国内外技术现状
1.1 国外
国外对作业级ROV的研究较早且技术相对成熟,知名研究机构有英国海事技术中心、美国海军研究生院智能水下运载研究中心、美国佛罗里达大西洋高级海洋系统实验室等。国外知名ROV制造企业有:美国的Oceaneering;英国的SAAB Seaeye, SMD,TechnipFMC;挪威的Argus等公司。美国Oceaneering公司是国际知名的ROV制造企业,在全球范围内约有400多台ROV,占据世界钻井支持业务的30%[2]。英国SAAB Seaeye公司是一家致力于电动ROV研发和生产的知名企业,生产的ROV约占全球ROV市场份额的14%;其ROV的核心技术和竞争优势是iCON分布式智能控制系统,它将推进器、摄像机、水下灯等节点以并联网络形式连接,每个节点具有独立的微处理器,使得各节点独立运行、互不干扰,并且该款ROV拥有双供电备份系统,从而保证了系统的可靠性。位于挪威卑尔根市的Argus公司,也是一家致力于电力驱动ROV设计与制造的公司,其作业级ROV实物如图1(a)所示。英国SMD公司于2003年收购Hydrovision公司后进入作业级ROV市场,目前有Atom(轻量级)、Quasar(中量级)和Quantum(重量级)3种系列ROV产品,如图1(b)所示。
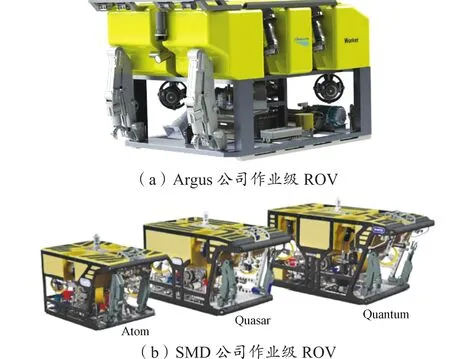
图1 作业级ROVFig.1Work-class ROV
1.2 国内
国内对海洋装备的研究和开发起步较晚,从20世纪70年代末才开始涉足ROV领域,且大都基于科考研究,与国外差距较大。国内ROV的研究工作主要集中在哈尔滨工程大学、上海交通大学、中国科学院沈阳自动化研究所(简称“沈自所”)、中船重工第702研究所等高等院校和科研机构[5]。
1985年12月,沈自所蒋新松团队研制出的“海人一号”ROV样机首航成功,并于次年完成海上试验,开启了我国水下机器人研制新征程。2003年,国家重大科技专项——“海龙号”系列研制工作开始启动;2009年,“海龙2号”在东太平洋3 500 m深海域成功发现“黑烟囱”,这标志着我国ROV总体性能达到了世界领先水平,该专项的主要研制工作由上海交通大学水下工程研究所完成。
2015年5月8日,由上海交通大学牵头研制的4 500 m作业级ROV“海马号”(图2)顺利通过科技部验收,在3个阶段的海试中,“海马号”先后下潜17次,最大下潜深度突破4 500 m,完成了近百项技术指标考核。
2018年10月26日,由沈自所牵头研制的“海星6000”ROV(图3)在多个海域完成科学考察任务,下潜深度首次突破6 000 m,创造了我国ROV最大下潜深度记录,此次“海星6000”科学考察应用任务圆满完成,标志着我国深海作业级ROV平台和应用技术迈上了新台阶,为提升我国6 000 m级深海科学考察作业能力奠定了基础。
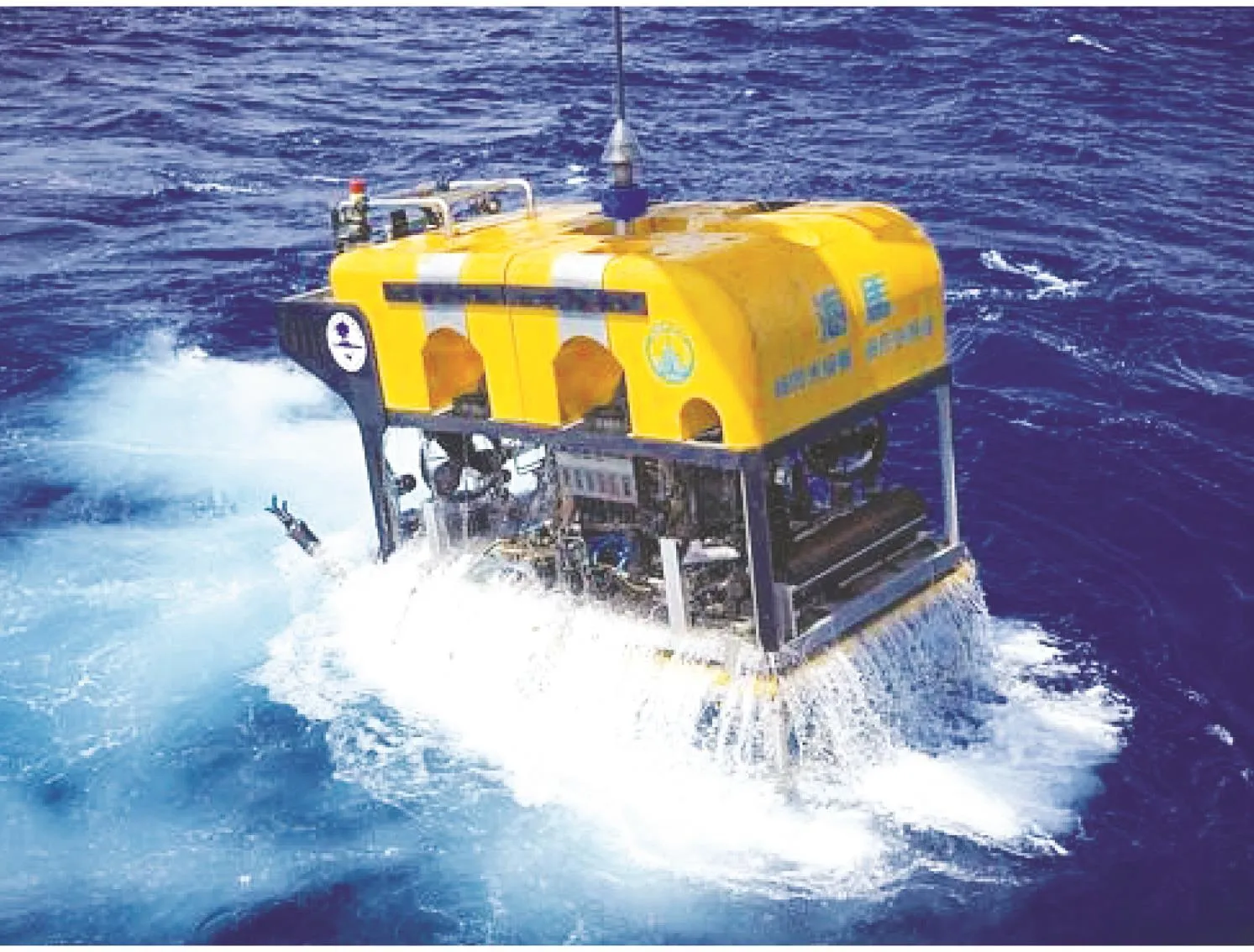
图2 “海马号” ROVFig.2 Haima ROV

图3 “海星6000”ROVFig.3 Haixing 6000 ROV
株洲中车时代电气股份有限公司于2015年收购了英国SMD公司,并于2017年在上海临港成立了上海中车艾森迪海洋装备有限公司,开始进军深海装备领域。截至目前,已向南方电网交付一台1 000 m作业级Atom型号ROV,用于琼州海峡海底电缆检测;向上海打捞局交付一台6 000 m作业级Quasar型号ROV,用于深海领域的打捞和救援。
1.3 国内外研究现状对比分析
国内外不同品牌深海作业级ROV主要性能参数如表1所示。总体来看,国内ROV下潜深度可达到国际同等水平,具备ROV总体制造和集成能力;与国外的差距主要在于一些关键零部件不能实现自给,比如声呐、机械手、浮体材料及脐带缆等。

表1 不同厂家深海作业级ROV主要性能参数Tab.1 Main performance parameters of deep-sea work class ROV of different manufacturers
2 深海作业级ROV系统组成及关键技术
深海作业级ROV系统包括水上和水下2部分。水上部分由控制舱(包括高低压配电柜、PLC控制系统、操控台和视频监控显示器)和布放回收系统(launch and recovery system, LARS)组成;水下部分由中继器和ROV本体(包括浮力材料、本体框架、动力与推进系统、水下观测系统、导航定位系统、水下供电系统、水下传感系统、电子控制系统和作业工具系统)组成,如图4所示。
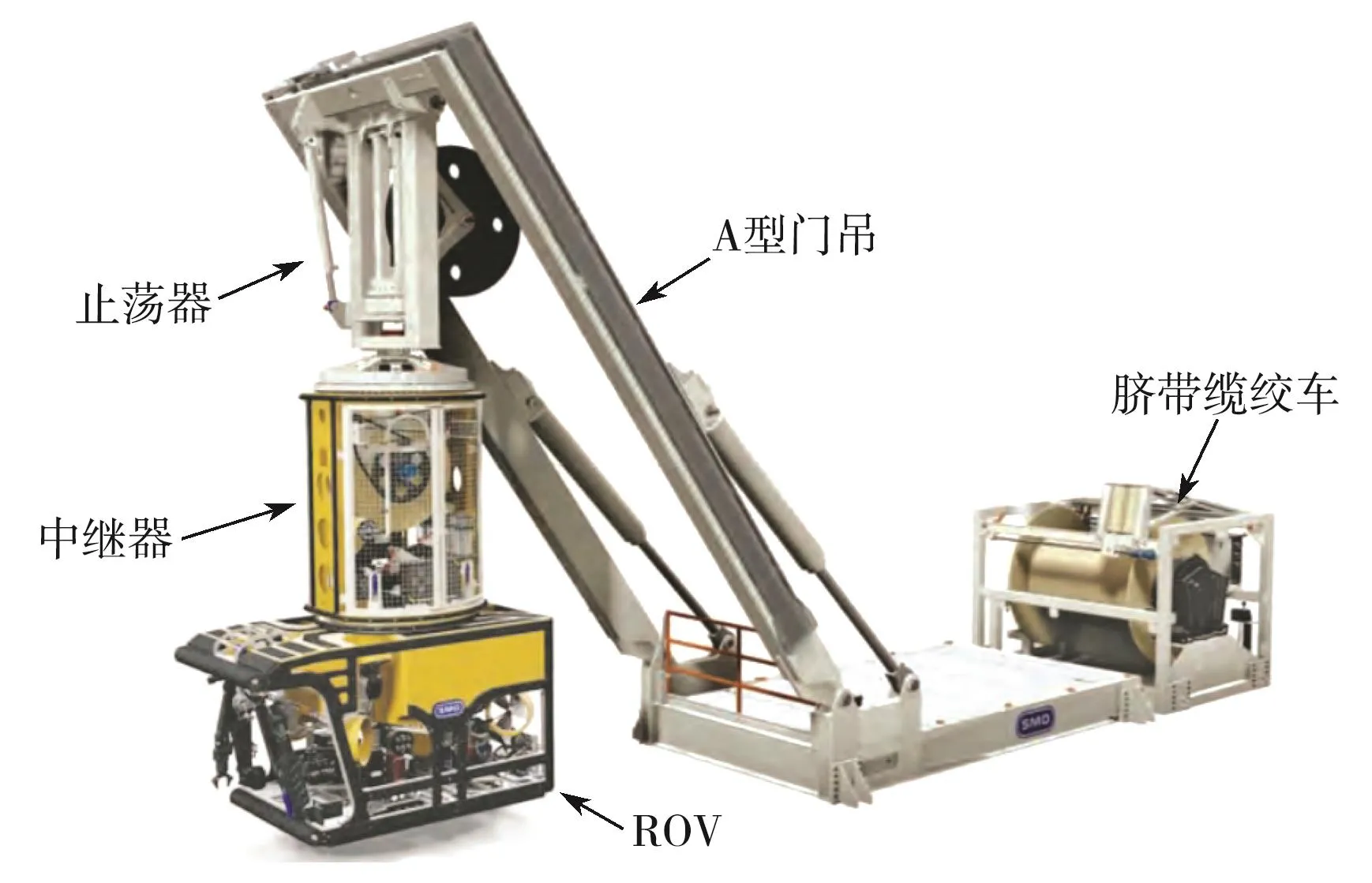
图4 作业级ROV系统组成结构Fig.4 System structure of work-class ROV
2.1 布放回收系统
深海作业级ROV的布放回收系统包括脐带缆、脐带缆绞车、A型门吊、止荡器和绞车控制台。其中脐带缆绞车用于存储脐带缆;脐带缆通过A型门吊和止荡器与ROV相连;绞车控制台控制绞车滚筒旋转,配合A型门吊向舷外或舷内运动,实现ROV的布防和回收。
2.1.1 脐带缆
脐带缆(图5)用于深海作业级ROV的电力传送和信息通信,通常由数根电缆、光纤、聚合物保护套、填充物在成缆机上螺旋成形。根据作业海深和工况的不同,有时需对脐带缆进行铠装,以提高其抗拉强度,防止其在恶劣工况下被拉断。
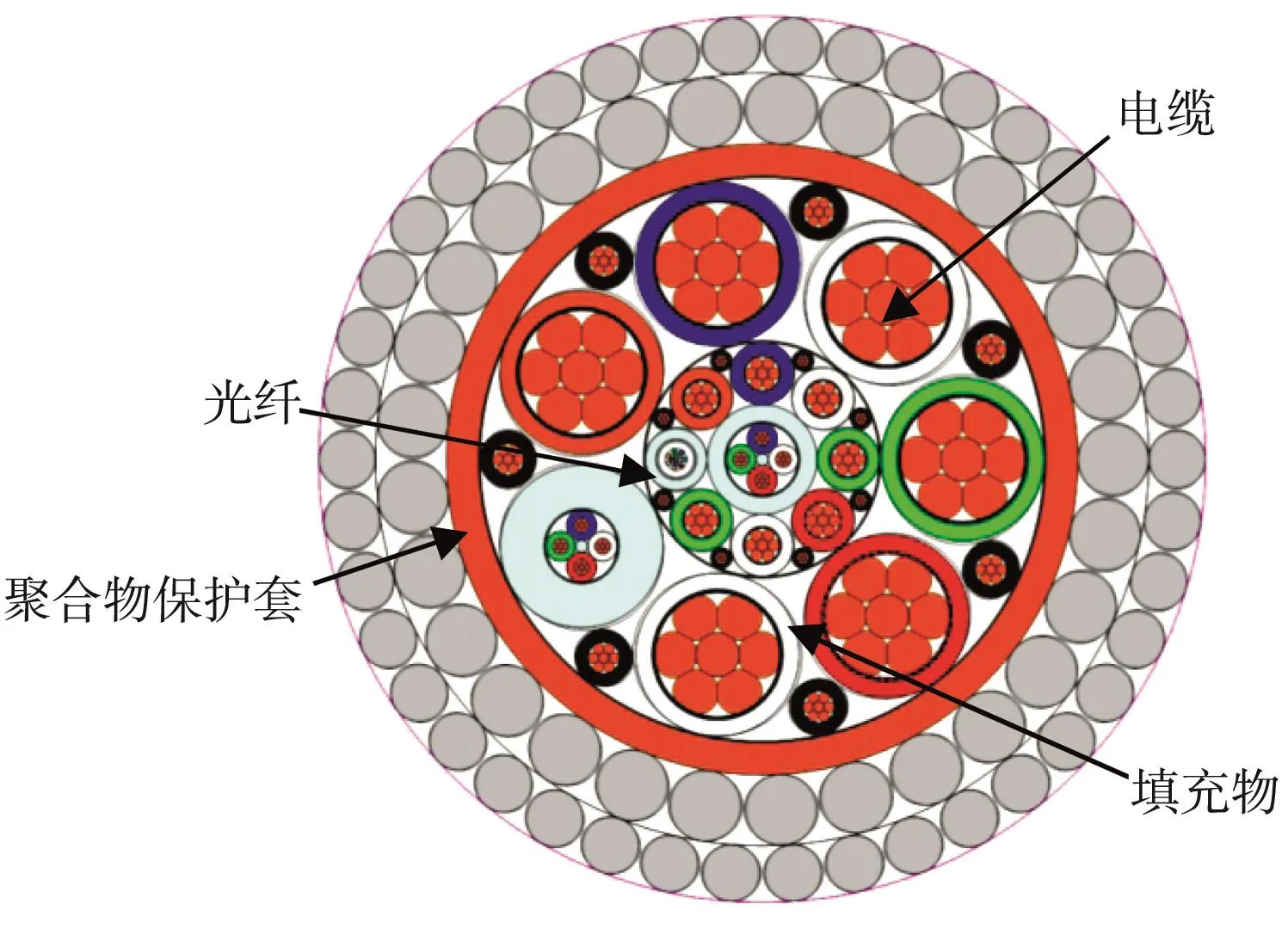
图5 脐带缆Fig.5 Umbilical
脐带缆在水下受到洋流等环境载荷的作用,加上自身重量因素,容易发生拉伸失效、弯曲失效等疲劳失效。因此在生产制造中,需根据脐带缆作业环境进行仿真分析,确定其抗拉强度、屈服强度和弯曲性能等基本力学参数,为生产制造以及应用提供理论依据。多单元多层次成缆技术和各单元形变控制技术是脐带缆制造的技术难点[6]。
由于脐带缆设计及制造技术复杂,国内目前缺少相对成熟的分析软件和测试系统,且只有为数不多的几家厂商生产,而实现工程应用的则更少。中天科技海缆有限公司承担过两项有关脐带缆研究的国家“863计划”项目,开创了我国脐带缆制造领域的先河。欧美发达国家拥有完备的设计理论和分析方法,其中OceaneeringMulti fl ex公司、DUCO公司和Nexans公司生产的脐带缆商业应用十分广泛。
2.1.2 脐带缆绞车
脐带缆绞车(图6)用来存储和释放脐带缆,从而实现ROV的布放及回收,其驱动方式有液压驱动和电机驱动两种方式。根据ROV作业深度的不同,绞车的储缆量也不同,随着ROV下潜深度增加,所需脐带缆长度相应增加,较长的脐带缆对绞车整体结构有较大的影响。受夹板空间限制,绞车长度方向尺寸不可能太大,只能通过增加卷缆层数来提高容缆量,而过多的层数不利于排缆的控制,且底层热量不易散出;另外,绞车滚筒为承受更大的重量,其壁厚会相应增加,壁厚增加又会导致绞车转动惯量增加,继而增加紧急制动的难度。因此,脐带缆绞车合理的结构设计是保证ROV作业深度的重要前提之一。
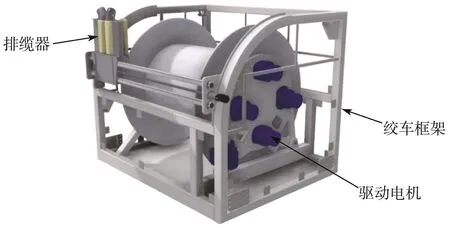
图6 脐带缆绞车Fig.6 Umbilical winch
船体在海浪冲击下产生横摇、纵摇和升沉起伏运动,会导致脐带缆张力发生突变,过大的张力会拉断脐带缆,过小的张力又会导致ROV与船体碰撞,影响ROV的收放;另外,交变载荷会影响脐带缆的疲劳强度,导致脐带缆疲劳损坏。为保障ROV布放、回收的安全性以及作业的稳定性,脐带缆绞车需具备升沉补偿功能,以保证脐带缆处于恒张力状态。
挪威Hydralift公司和美国Westech公司是世界知名恒张力绞车制造商,其控制系统响应速度快、抗干扰能力强、稳定性高、操作界面友好,被广泛应用于海工领域。国内,海工领域恒张力脐带缆绞车的制造商较少,主要受限于控制精度和系统的稳定性[6]。
2.1.3 A型门吊和止荡器
止荡器与A型门吊配合使用,用于吊放ROV。止荡器具有强制纵横角度调整和自由摆动功能,能防止复杂海况下ROV的剧烈晃动,避免ROV与船体或其他设备发生碰撞。
国外LARS系统技术成熟的厂家有挪威的MacGregor、荷兰的Pommec、英国的Saab Seaeye等公司;国内LARS系统尚处于研究阶段,商业化应用较少,且多用于浅海范围,其材料、承载能力以及升沉补偿性能等指标与国外LARS系统相比还有较大差距。
2.2 中继器(TMS)
中继器(系缆管理系统)通过脐带缆与A型门吊、绞车相连,直接由主缆收放,它与ROV本体之间通过中性浮力系缆连接,可消除主缆和母船的升沉、纵倾、横摇对ROV的直接影响,保证了ROV运动的平稳性、灵活性和可控性,同时也能减小ROV推进器所需功率,充分发挥ROV动力推进系统效率。常见的中继器有车库式和顶置式两种。车库式中继器主体结构分为上下两层,上层是排缆系统,下层用于存放中小型ROV。顶置式中继器,顾名思义就是整个中继器置于ROV上方,与车库式中继器相比,其排缆系统更加复杂,承载能力和储缆能力更强,储缆长度可达数千米,使得ROV作业半径更大,通常被用于深海作业级ROV。
国外知名的TMS制造商有英国TechnipFMC公司、英国SMD公司和英国PerrySlingsby Systems公司,其技术优势均在于具备系缆张力检测功能和过载保护功能,控制稳定、精准,ROV释放过程中系缆无扭转和反向弯曲现象。其中TechnipFMC公司生产的TMS还可配置推进器,能实现TMS自转,从而调整TMS工作角度,提高ROV回收的安全性和可靠性。
国内,沈自所和上海交通大学对TMS也进行了相关研制,但没有形成系列化产品,其功率密度、操控性以及稳定性与国外同类产品相比还有一定差距。
2.3 ROV本体
2.3.1 浮力材料
浮力材料(图7)可保证ROV在海水中是中性浮力。目前常用的浮力材料是玻璃微珠复合泡材料,其通过在微米级的空心玻璃微珠周围灌注树脂成型,特点是密度小、浮力大、吸水率低、抗压强度高,具有良好的耐腐蚀性能,能够进行机械加工[7]。

图7 浮力材料Fig. 7 Buoyancy material
国外知名浮体材料制造商有瑞典Trelleborg公司、澳大利亚Matrix公司及英国Balmoral公司,他们的产品优势在于应用水域更深,同等水深下的密度更低、耐压强度更大;国内浮体材料制造商有台州中浮新材料科技股份有限公司、河南泛锐复合材料研究院有限公司等企业,其产品性能略低于国外品牌的,在深海作业级ROV上也没有进行实际工程应用。高性能空心玻璃微珠是浮体材料的核心原材料,但其一直以来受国外垄断,国内无法自给。为解决这一现状,国内中国科学院理化技术研究所承担了“高性能空心玻璃微珠产业化关键技术”的研发工作,并于2013年实现了深海浮力材料核心技术突破,但其离商业化应用还有一定差距。
2.3.2 动力与推进系统(推进器)
ROV动力与推进系统(图8)有液压驱动和电力驱动两种方式,液压驱动系统具有强非线性、强耦合性,难以实现精确控制;但其功率质量比大,在相同功率下重量和体积均比电力驱动的小,可满足大功率需求。电力驱动推进系统的控制性能较好,其独立的供电和操作系统提高了设备的可靠性冗余度,水下机动性及可靠性更好,无须液压油,对环境更友好;但其推力体积比小,很难在大功率作业级ROV上得到广泛应用。
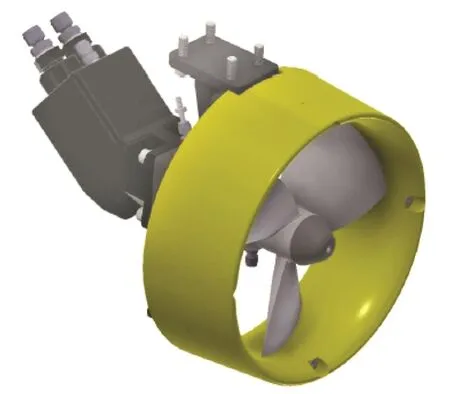
图8 推进器Fig.8 Thruster
国外知名推进器厂商有美国Sub-Atlantic公司,其水下液压推进器有4种型号,适用水深为全海深,推力范围为370~850 kgf(1 kgf=9.8 N);直流无刷电动推进器也有4种型号,其推力较液压推进器的小,推力范围为26~220 kgf。英国SMD公司水下液压推进器型号更多(共有9种)、推力更大(推力范围为200~1450 kgf)。国内水下推进器厂家较少,天津昊野科技有限公司是一家从事电动推进器的厂商,其型号众多(共有28种),推力范围为1.4~236 kgf。国内推进器应向更深水深和更大推力方向发展;同时优化水下推进器控制方法,如将模糊控制、自适应控制、滑模控制、神经网络控制等多种控制理论相结合,开发控制精度高、鲁棒性好的控制方法,使得水下推进器控制更加稳定和智能[8-9]。
2.3.3 水下观测系统
水下观测系统包括声呐、水下灯及高清摄像机。由于自然光无法到达深海,水下黑暗环境对水下灯和高清摄像机提出较高要求:水下灯应具备较高的亮度和免维护寿命特点,发光通量亮度通常大于10 000 lm,免维护寿命大于5 000 h;高清摄像机应具有较高的分辨率,最低光照强度优于0.01 Lux。声呐用来对水下地貌和ROV周边环境成像,并对海底地形地貌进行勘测,防止ROV与水下障碍物碰撞。
国外知名声呐品牌有英国Tritech、加拿大Imagenex、美国Blue View、挪威Kongsberg等,他们的图像声呐、侧扫声呐、避碰声呐被广泛应用于ROV上;国内哈尔滨工程大学、中国科学院声学研究所在声呐领域研究较多,但在深海作业级ROV上没有应用。国内声呐研究方向还应聚焦在高精度、高分辨率、超宽覆盖以及小型化和轻量化等方面[10-12]。
2.3.4 导航定位系统
导航定位系统由超短基线定位系统、惯性导航系统、深度传感器、罗盘(艏向、倾角传感器)和高度计组成。超短基线定位系统由安装在母船上的发射换能器、接收基阵和固定在ROV上的应答器组成。发射换能器向应答器发出脉冲,应答器收到信号后发出反射脉冲;接收基阵收到脉冲信号后,测量出脉冲在X、Y两个方向的相位差,计算出ROV和基阵两者间的距离L,从而推算出ROV水下位置和深度。陀螺仪和加速度传感器是惯性导航系统的主要组成部分,惯性导航系统根据陀螺仪的输出数据建立导航坐标系,并根据加速度传感器输出数据解算出ROV在导航坐标系中的速度和位置。罗盘用来测量ROV的艏向和倾角;深度传感器用来测量ROV距水面的距离;高度计用来测量ROV距水底的距离。
2.3.5 电子舱
水下耐压电子舱(图9)是ROV的核心部件,其为其他部件提供电力和数据通信,并与控制集装箱内控制台保持实时的信号传输。为防止因海水压力和腐蚀而发生破坏,电子舱必须保证足够的耐压密封性能和耐腐蚀性,并尽可能地减小体积并减轻重量。
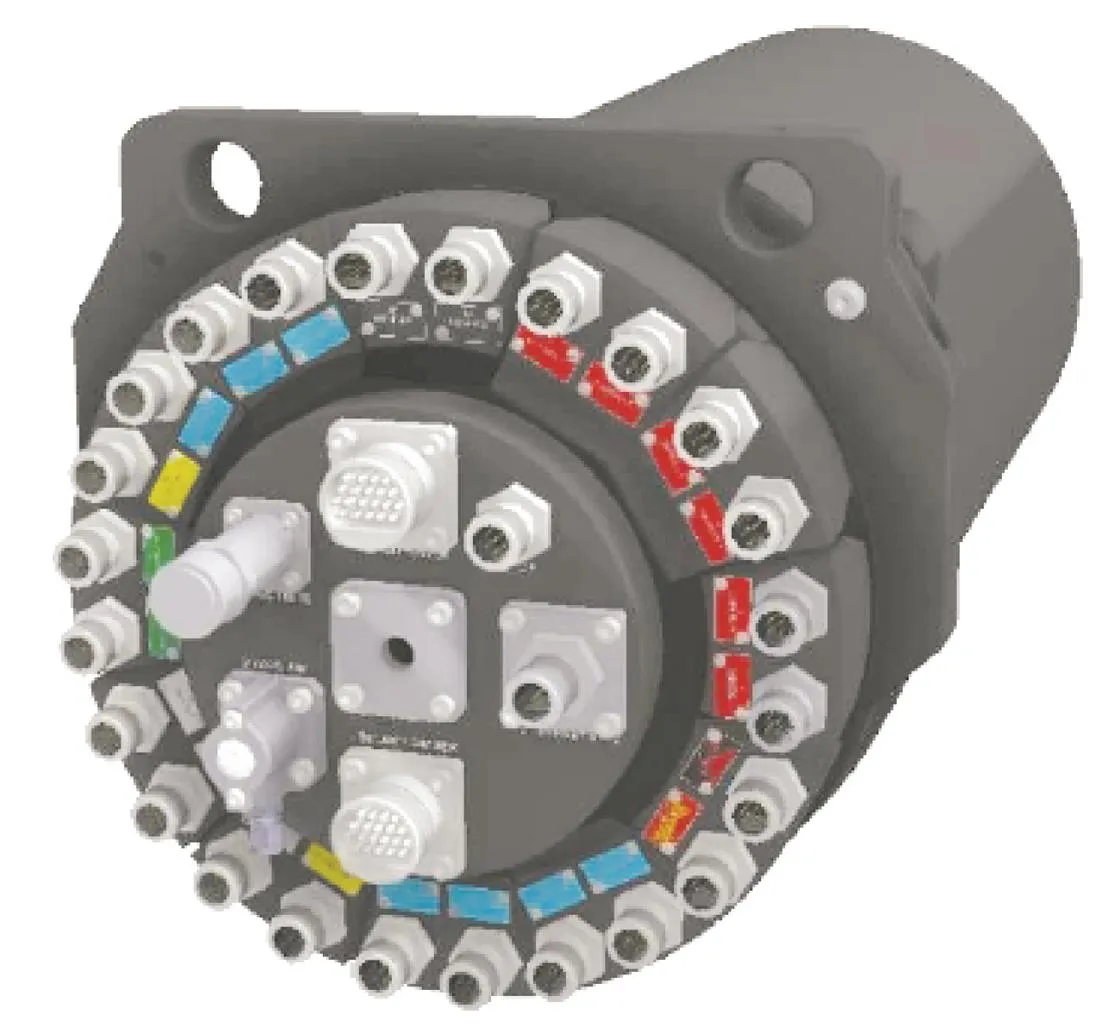
图9 电子舱Fig.9 Pod
2.3.6 补偿器
深海作业级ROV下潜深度越大,所承受的海水压力就越大。较大的水压易导致阀箱、灯控箱等箱体被压坏,因此需对其进行压力补偿来平衡外界海水压力。ROV下潜时,海水压力将补偿器(图10)里的液压油推向ROV液压系统内部,使系统的回油压力与外界海水压力达到平衡;且随ROV下潜深度的变化自动调节系统的回油压力,实现不同海水深度下的压力补偿[13]。水下液压系统得到压力补偿之后,系统压力建立在海水压力的基础上,其工作状态与岸上常规液压系统相同,这样水下液压系统便可按照常规液压系统的方法来设计,而不必考虑海水压力的影响。

图10 补偿器Fig.10 Compensator
2.3.7 作业工具
深海作业级ROV根据作业任务的不同,可选配不同的作业工具,如多功能机械手、取样器、液压剪、切割锯、割缆器、扭力工具、转矩适配器及液压角磨机等等。机械手是深海作业级ROV的重要作业工具,通常在ROV左右舷分别配置1个七自由度和1个五自由度机械手,用于水下抓取作业。美国Schilling Robotics System公司和Kraft TeleRobotics公司是知名的水下机械手厂商;国内,沈自所研制的水下机械手在“海星6000”号ROV和“深海勇士号”载人潜水器上得到成功应用。由于ROV水下工具接口的有限性以及布局空间的局限性,其水下作业不可能搭载所有作业工具,可根据不同作业需求进行选配,因此,深海作业级ROV水下工具接口的通用性也是重要的研究方向之一。
3 我国深海作业级ROV的发展建议
当今,发展水下机器人人工智能技术将是我国水下机器人产业实现快速发展的有效途径之一,涉及全自动智能布放与回收技术、水下自主巡航技术、智能避障及多机器人群体化技术等,这些技术关系到系统动力传输、通信、导航定位及目标识别等功能的发展。
(1)全海深、长距离动力传输
现有深海作业级ROV的电力是通过脐带缆从母船上获得。一方面,其传输距离长、风险等级高、能源效率不高,且长距离脐带缆还会带来更大的制造成本;另一方面,现有的电池供电技术无法满足长时间的续航要求,ROV推进系统功率和运行速度也会受到限制,因此研究深水大功率变流器应用技术、水下电器基础部件集成技术,开发高效率、高密度能源,进一步发展海底充电桩为移动式水下机器人提供能源,将是海底高效能源动力供应的发展方向。在保证ROV动力能源系统结构尺寸合适的前提下,优化推进系统,以确保深海作业级ROV能够达到设计速度要求并满足多自由度机动要求。
(2)通信技术
多机器人群体化作业需要高稳定性、大带宽、高通信速率的水下通信技术来支撑。目前水下机器人通信手段有电磁波、声波和光波3种方式。电磁波在海水中衰减严重,并且衰减程度随频率的增加而增加,因此用于水下通信的电磁波频率通常为3~30 kHz的甚低频和30~3 000 Hz的超低频,而低频的电磁波无法满足大容量通信的需求,限制了其在水下通信的应用。水下声学通信是目前最为成熟的水下通信技术,具有传输距离远的优点;但其通信带宽有限、传输方向性较差、多径效应明显,这也限制了水声通信在水下机器人领域的应用。光波具有较高的频率和通信带宽,目前世界各国正积极开发水下激光通信。由于海水介质对蓝绿激光的吸收率最低,激光信号可以通过卫星实现大范围通信,目前美国已经实现了对水下100 m左右深度的潜艇进行通信;但由于当前的蓝绿激光发射器体积及能耗较大、效率低、水下通信距离有限,将该技术应用到深海作业级ROV上还需进一步研究。每种水下通信技术都有着各自的优缺点,采用多种通信方式相结合的方式,开发大带宽、高速率、远距离的新型水下通信技术是实现水下机器人集群化的重要前提。
(3)多种方式相结合的导航定位技术
高精度导航定位技术是决定ROV能否在水下安全作业以及顺利返回的关键因素,但深海环境缺少明显的固定标志参考物,采用单一的导航定位无法获得ROV相对准确的位置信息。惯性导航系统的导航信息是经过积分计算得到的,其精度较低,存在定位漂移,需不断进行修正;超短基线的声学换能器基阵方位系统不能保证与载体方位系统完全重合,存在系统安装误差。因此,水下导航定位需采用多种导航定位相结合的方式,如将超短基线定位系统和惯性导航系统相结合;同时开发适于水下应用的非传统导航方式,如:地形轮廓跟随导航、重力磁力匹配导航、海底地形匹配导航和其他地球物理学导航技术,而这些技术基于地球本身物理特性,具有自主性强和不受时间、地域影响的特点,需要提前进行数据采集和建立数据库[14]。深海作业级ROV水下导航定位技术的发展方向将是,结合传统方式和非传统方式的各自优势,发展可靠性高、集成度高并具有综合补偿和校正功能的智能导航系统。
(4)水下目标的探测与识别技术
目前水下目标探测与识别有声学探测和光学探测两种方式。声学探测主要通过各种声呐(单波束声呐、多波束声呐、合成孔径声呐)完成,声呐发射超声波并接收物体反射回来的声波,通过声波强度对目标进行声学成像。声学探测方法探测距离远,但成像精度不高,得到的图像不够直观。光学探测利用光学成像设备对水下目标进行照相,成像分辨率高、图像清晰度较好;但光在水中会衰减,探测距离有限,并且成像质量很大程度上取决于海水能见度。近几年,激光成像技术得到发展,其成像质量高、工作距离远,并且能够提供水下目标距离和坐标信息,是较理想的水下目标探测与识别手段,但目前该技术在国内还处于研发阶段,还不能达到工程应用的要求。
(5)标准化和模块化设计
目前深海作业级ROV各子系统定制化程度明显,不具备通用性和互换性,为优化深海作业级ROV作业性能,提高其使用的方便性和通用性,及其与现有邻近系统的协作能力,水下机器人标准化和模块化设计是未来的发展方向之一。标准化的最终目的是实现模块化。标准化可从机械、液压、电气、软件等方面着手,提出标准接口和数据格式的概念,在设计和制造过程中分模块进行总体布局和优化设计。
(6)可靠性设计
深海作业级ROV系统水下作业环境极其复杂,存在较多不确定性因素,一旦出现故障,短时间内难以修复,不仅会降低作业效率,甚至面临丢失的风险,带来巨大损失。因此,可靠性设计是保证深海作业级ROV安全作业和顺利回收的重要手段,其不仅包括机械结构、水下耐压密封等硬件方面,同时也涉及控制系统方面,如故障检测、容错控制等。故障检测与容错控制在航天系统和核电系统有着成功的应用,但在深海作业级ROV领域未见报道。因此,基于解析模型、信号处理的故障检测方法和异步信息融合技术、导航传感器短时失效处理技术、容错滤波技术仍是深海作业级ROV研究方向之一。
4 结语
深海作业级ROV是人类探索海洋、开发海洋的重要载体,安全、稳定、高效、可靠的作业性能始终是深海作业级ROV的研究方向。国外深海作业级ROV起步较早且应用较广;我国虽已解决了一批ROV相关技术难题,具有一定的技术基础积累,但在深海通信、导航定位等关键技术领域与国外还有相当大的差距。目前,我国尚未在深海作业级ROV领域形成一套从研发、生产到服务的完整社会分工体系,更没有一套完整的产业链,缺乏产业发展推动力,工程化和实用化进程缓慢。若要在深海领域进行自主探索开发,避免受制于人,必须解决诸多关键技术难题,如玻璃微珠原材料问题,脐带缆成缆技术和形变控制技术;LARS系统的控制精度和稳定性问题及其向轻量化、智能化方向发展问题;传统水下通信和导航定位技术的局限性问题;水下激光成像技术壁垒等。另外,为降低ROV深海作业的风险、提高操作人员的熟练度以及紧急情况下的应急处理,自主开发ROV水下作业模拟系统也是十分有意义的。
猜你喜欢
船舶与海洋工程(2021年5期)2021-11-18
船舶标准化工程师(2020年1期)2020-06-12
健康博览(2019年10期)2019-12-02
环境与生活(2018年7期)2018-09-10
学苑创造·A版(2017年4期)2017-05-13
学苑创造·A版(2017年5期)2017-05-09
科技与企业(2015年18期)2015-10-21
中小企业管理与科技·下旬刊(2009年7期)2009-09-18
