
基于LMI的小型涡扇发动机非线性稳态控制
2020-08-01 01:55曹惠玲郑里鹫
中国民航大学学报 2020年3期
曹惠玲,郑里鹫
(中国民航大学航空工程学院,天津 300300)
在役民机所装配的推进控制系统最终是基于经典线性补偿回路设计的[1-2],无法最大程度地发挥发动机性能,研究人员专注于参数变化性、非线性和系统变量约束的主题,致力于将非线性控制理论应用于发动机控制系统[3-4]。目前工程上广泛将航空发动机飞行包线分为几十个区域,对于每个区域选择一个或若干个稳定工作点进行线性化,针对线性化模型设计控制器,并通过增益调度技术对控制器进行集成设计。工作点的数目取决于航空发动机的复杂性、非线性以及物理作用。随着航空发动机性能的提升,其非线性日益突出,工作点数目过多导致调度系统的设计过于复杂[5]。针对控制系统的参数和工况偏离设计工作点的情况,一般结合鲁棒控制,将参数的不确定变化当作相对于基准模型的摄动,很少对系统的非线性进行建模研究,往往对这种不确定性范围的估计过于保守,导致系统性能的下降[6-7]。以DGEN380 小型涡扇发动机为研究对象,在其线性状态空间模型基础上引入一般非线性项对模型工作范围进行拓宽,并结合广义Gronwall-Bellman 引理和线性矩阵不等式(LMI,linear matrix inequality)方法设计该发动机的稳态控制律。
1 非线性系统控制方法研究
LMI 作为有力的设计工具被广泛运用于控制领域中[8]。在控制系统的分析与设计中,稳定性是需要研究的首要问题。Lyapunov 直接方法是分析和设计非线性控制系统最重要的工具。Lyapunov 稳定性定理[9]表明,如果存在连续可微的函数V ∶[0,∞]×Ω→R 且满足

其中:∀t≥0,∀x∈Ω,且W1(x),W2(x)和W3(x)都是Ω 上的正定函数,则x=0 是渐近稳定的。
Gronwall-Bellman 引理常被用于非线性系统的稳定性分析[10-11],Louartassi 等[12]提出了Gronwall-Bellman引理的新推广,可以指数方式稳定一大类非线性系统。该广义Gronwall-Bellman 引理指出,当t∈I=[a,b]时,如果存在ρ(t)、z(t)和w(t)非负连续,c >0,n >1为整数,使得

如果有

则有

利用广义Gronwall-Bellman 引理主要对状态变量范数的收敛速度进行研究,基于该引理设计滑模控制参数的LMI 约束,将小型涡扇发动机稳态控制系统分析和调节器控制律的设计转化为带有LMI 约束的优化问题,使得闭环系统获得期望的动态响应性能。
2 发动机非线性控制系统设计
稳态控制的目的是使发动机较长时间保持在一个期望工作状态附近,所谓期望工作状态即相应的稳态工作点,其对应发动机产生的一个固定功率状态,即飞行员通过油门杆控制的推力水平,通常将转速或增压比作为设定值。当发动机偏离设定工作点时,设定值和反馈值之间的差异会产生误差,该误差即是稳态控制回路的输入,稳态控制通过控制算法计算输入燃烧室的燃油流量将误差调节为0,使控制变量保持定值,以维持飞机所需的发动机推力水平。控制对象DGEN380 发动机采用全权限数字式电子控制(FADEC)系统,该系统由传感器、数字式电子控制器、执行机构、供油装置、油泵及被控目标组成。传感器测量发动机当前运行状态参数,并将信号传递到控制器,然后由控制器完成各控制算法的计算[13]。由于其几何不可调,在一定的飞行条件和大气环境下,只要主燃油流量一定,则该发动机的工况唯一确定。对于航空发动机控制系统,建立具有高保真度、简化的且物理特性清晰的“大偏离”实时动态模型对于航空发动机在宽广的飞行包线内稳定、可靠地运行并且充分发挥其性能效益有着重要意义。令发动机非线性气动热力学模型表达式为

其中:x 为状态变量;y 为输出变量;u 为控制变量。相对于压力、温度等参数以及作动器系统的动态特性,高低压转子转速动态过程要慢得多,对整个发动机动态特性的影响具有主导作用,对控制系统进行研究时,仅考虑高低压转子转速的动态特性。则

其中:n1、n2和wf分别表示以设计工作条件下的设计点作为基准点做归一化处理后的低压转子转速、高压转子转速和燃油流量。
2.1 实时非线性模型
结合该发动机设计参数及其特性数据,采用解析法利用Matlab/Simulink 仿真平台建立瞬态循环模型。将模型在设计工作条件下油门杆位置为50%时燃油流量对应的稳态工作点(x0,u0,y0)处高低压转子的阶跃响应数据在设计飞行条件下进行相似换算,并以设计工作条件下的设计点作为基准点做归一化处理,通过拟合[14]提取该稳态点线性化状态变量模型,即

其中:Δx = x - x0,Δu = u - u0,Δy = y - y0,
为使模型适用于工况偏离线性模型设计点较大的情况,引入一般非线性项。此时

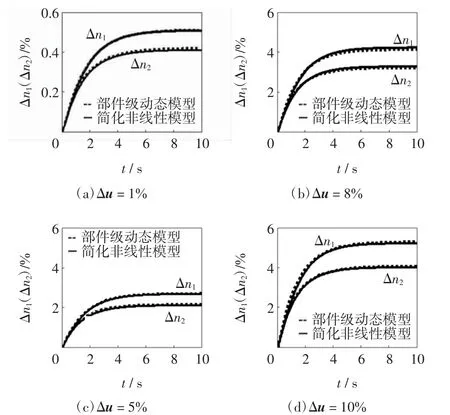
图1 不同燃油阶跃下的高低压转子转速响应Fig.1 Response of high and low pressure rotors under different fuel steps
由图1 可以看出,发动机部件级动态循环模型响应曲线和简化非线性模型响应曲线吻合良好,模型精度可靠,适用于该发动机设计工作条件下油门杆位置从50%到80%的运行范围。
2.2 基于LMI 的调节器设计
状态方程的状态由n1、n2偏离稳定工作状态的变化量值给定。在非线性仿真或实际工作中,产生一对期望(n1、n2)的wf通常由发动机稳态非线性求解器计算得到。通过计算n1、n2偏离参考状态的变化量,可以得到Δx。当发动机处于某一稳态工作点时,Δx=0,Δu=0,外界环境发生变化时,状态将不再为0。所谓调节器问题,指在一定工作区域内设计稳态控制律,使得状态变量从该区域内任意的初始值开始,都能按指定方式趋近于稳态值。对于非线性模型式(8),容易求得(A,B)能控。控制目标是设计反馈控制律Δu =-KΔx,实现且使得Δx(t)具有良好的品质,使非线性闭环系统镇定于稳态平衡点,其中K 为待求的反馈矩阵。将Δu=-KΔx,代入式(8)可得闭环系统为

令M=A-BK 并代入式(9)可得

状态方程式(10)的解为


非线性状态方程常常需要计算其解的边界。当矩阵M所有特征值均具有严格的负实部时,存在α >0,θ >0,使得

结合式(11)和式(12)可得到Δx(t)的边界范数‖Δx(t)‖2满足

由式(13)可以看出非线性状态方程式(10)解的范数‖Δx(t)‖2与α exp(-θt)和‖f(Δx(t))‖2有关。对于‖f(Δx(t))‖2,由矩阵向量相容性可得


从而得到‖f(Δx(t))‖2满足

将式(16)代入式(13)可得‖Δx(t)‖2满足
2.2.1 状态边界特性分析
利用广义Gronwall-Bellman 引理对状态偏差量范数‖Δx(t)‖2特性进行分析,对式(17)进行变换得到关系式

针对广义Gronwall-Bellman 引理,分别取n = 2,z(t)=‖Δx(t)exp(-θt)‖2,c=α‖Δx(0)‖2,ρ(t)=0,w(t)=α‖F‖exp(-θt),可以得到,如果系统初始条件满足关系式(4),则z(t)=‖Δx(τ)exp(-θt)‖2满足关系式(5)的约束关系。下面对系统初始条件‖Δx(0)‖2进行讨论,结合式(4)可得‖Δx(0)‖2应满足
纳米流体发电的本质是利用纳米孔与电解质溶液界面效应所产生的对阴/阳离子的选择透过性,将蕴含在溶液浓度梯度差中的吉布斯自由能转化为电能.基于纳米流体发电的基本原理可知,决定输出功率变化趋势的原因有两个:一是ΔC,随着它的增加意味着有更多的吉布斯自由能可以转化为电能;二是纳米孔阵列的离子选择透过性,它的强弱与纳米管道两侧双电荷层的厚度(λD)密切相关,λD的公式为:

对式(19)进行变换,可以得到

由于1-exp(-θt)<1,进一步得到

可以通过对矩阵K 的选取对α 和θ 进行调节使得‖Δx(0)‖2在满足式(21)的同时在模型的运行范围内。当系统初始条件‖Δx(0)‖2满足式(21)时,利用Gronwall-Bellman 引理可得

由于‖Δx(t)‖2是对边界特性进行分析,所以对(22)进行变换可得
令
则‖Δx(t)‖2满足

可得‖Δx(t)‖2将指数收敛到0,所以闭环系统指数收敛于平衡点。
2.2.2 LMI 约束设计

则有

由式(27)可以看出,‖Δx(t)‖2的边界特性与α和θ 有关,可通过反馈矩阵K 的选取来控制α,θ 的取值从而实现对‖Δx(t)‖2边界的调节,进而使系统获得满意的性能。
根据航空发动机控制系统对动态性能的要求[16],设计LMI 约束为


则‖Δx(t)‖2满足

2.2.3 闭环系统稳定性分析
基于Lyapunov 定理对闭环系统式(10)进行稳定性验证,取备选Lyapunov 函数,即

则有

从而得到

对于‖f(Δx)‖2,将式(35)代入式(16)可得

将式(36)代入式(34)从而可得V˙(Vx)满足

根据Lyapunov 定理,非线性系统式(10)能渐近稳定到平衡点,即通过求解式(28)所得反馈矩阵K 使闭环系统获得期望的性能。
3 仿真算例数值研究
在稳态情况下,不同油门杆所在位置分别对应设计工作条件下不同稳态工作点的供油量,由于采用的控制对象几何不可调,在一定的飞行条件和大气环境下,只要主燃油流量一定,则该发动机的工况唯一确定。选择控制模式,通过对燃油流量的调节来将转速维持在恒定值。对于控制系统,阶跃形式的扰动最为严重,为了良好地反映该发动机动态特性,状态变量的扰动量为阶跃形式,该扰动量是对发动机偏离设定工作点的模拟,对状态变量初始值Δx0的取值即模拟发动机转速偏离设定工作点,验证所设计控制律能否快速地将转速调节到设定值上,即Δx=0。
通过Matlab 中的Yalmip 工具箱求解式(28),可得K=[2.325 5 1.825 7]。求得分别取状态变量Δx 的初始值为[0 0.05]、[0.05 0]和[0.05 0.05],由此得到对应‖Δx0‖2的值分别为0.05、0.05 和0.070 7,小于0.100 1,满足式(29)的约束条件。3 种情况的控制系统响应轨迹曲线分别如图2~图5 所示。
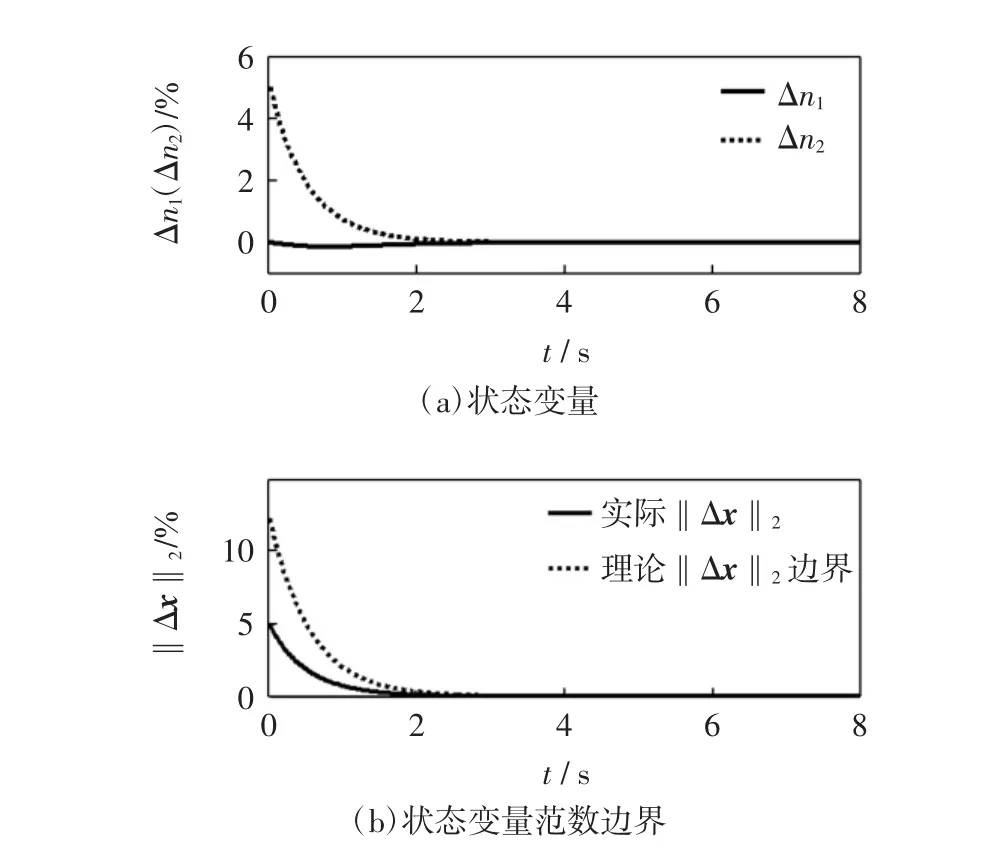
图2 系统初始值为[0 0.05]的状态响应轨迹Fig.2 State response trajectory with initial system value[0 0.05]
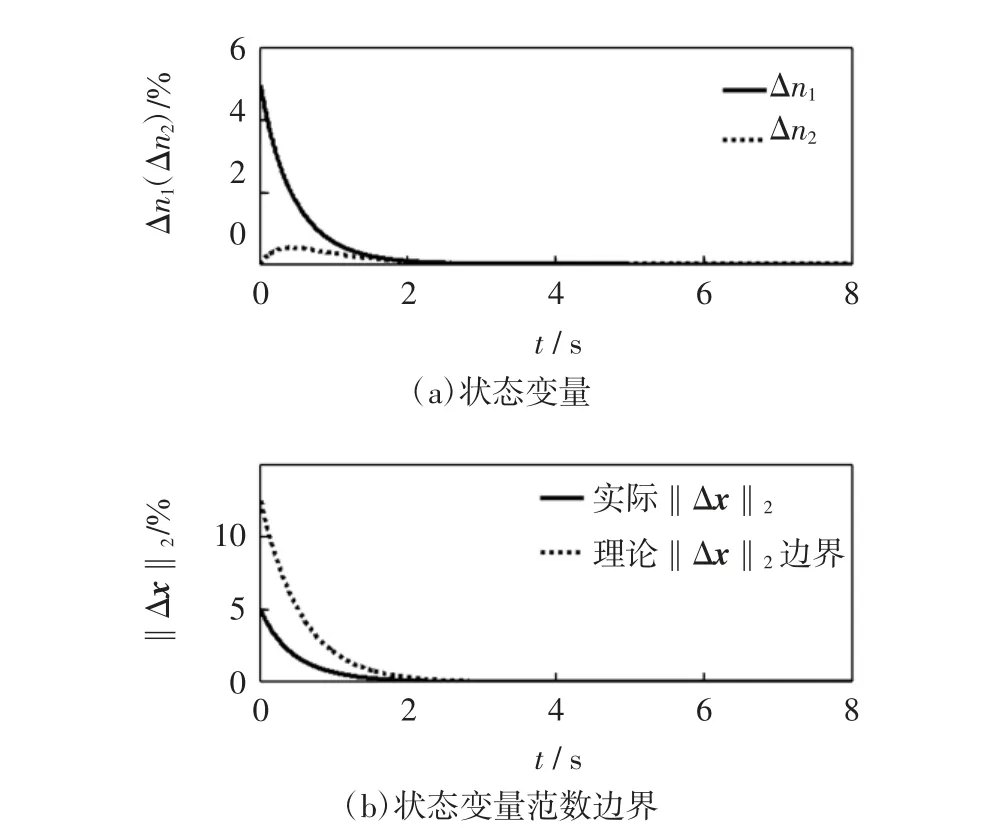
图3 系统初始值为[0.05 0]的状态响应轨迹Fig.3 State response trajectory with initial system value[0.05 0]
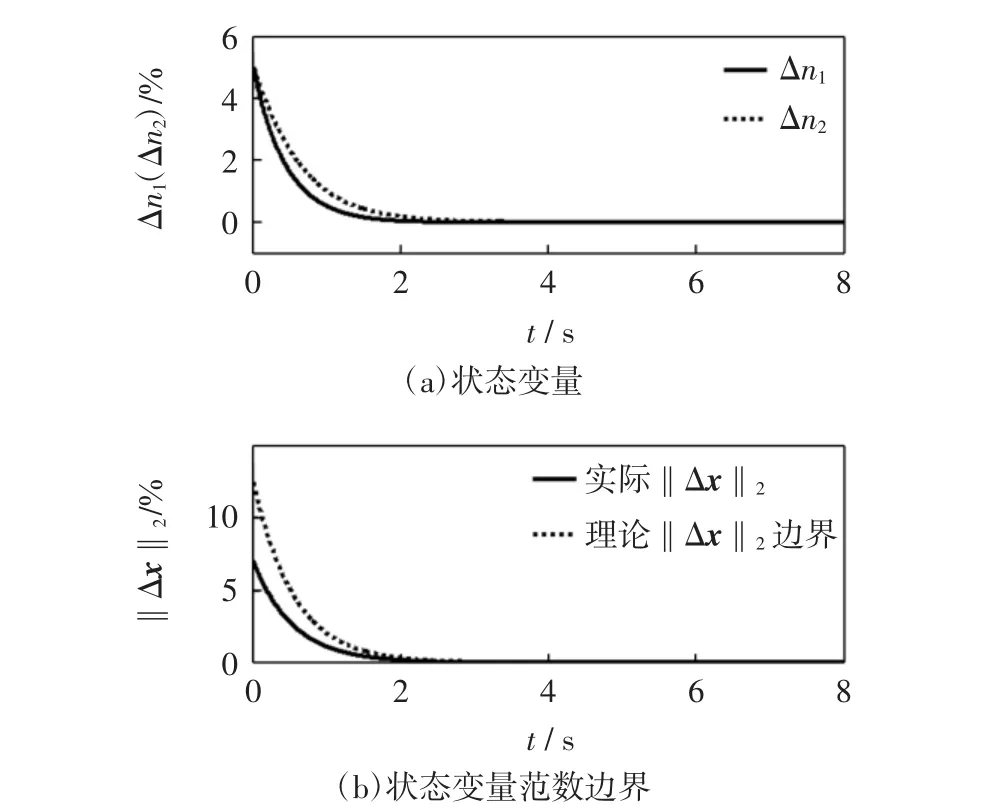
图4 系统初始值为[0.05 0.05]的状态响应轨迹Fig.4 State response trajectory with initial system value[0.05 0.05]

图5 三种不同状态初值下系统控制输入Fig.5 System control inputs for three different initial values
图2 ~图4 分别给出3 种不同初始值下的控制系统状态响应,可以看出,在较大的初始状态条件下,闭环系统能在较短时间内回到平衡状态,调节时间约为2.2 s 左右,响应性能较好,满足航空发动机控制系统的要求。图5 给出在3 种不同初始值下的控制输入,可以看出曲线平滑,符合航空发动机的供油规律,满足经济性要求,表明设计的发动机稳态调节控制器能在较短的时间内达到期望的性能。
4 结语
针对航空发动机强非线性的特点,在线性状态空间模型基础上引入非线性项,使模型适用于工况偏离设计工作点较大的情况,模型精度可靠。基于广义Gronwall-Bellman 引理设计了稳态调节控制器,该控制器可在一定初值条件下对状态变量二范数边界特性进行调节,所设计的控制器参数保证了控制系统的收敛性。利用Lyapunov 定理证明了该设计方法的有效性,以DGEN380 发动机为仿真研究对象,对上述控制器进行仿真,仿真结果表明,对于较大的状态变量初值,稳态调节控制器能使系统在较短时间内回到平衡状态。实现了基于发动机非线性模型的稳态调节,为小型涡扇发动机稳态控制律的分析与设计提供了一种有效思路。
猜你喜欢
遗传(2022年9期)2022-10-10
大电机技术(2022年3期)2022-08-06
军民两用技术与产品(2022年3期)2022-06-05
物流科技(2022年2期)2022-05-07
煤气与热力(2021年4期)2021-06-09
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
中华养生保健(2020年3期)2020-11-16
智能计算机与应用(2020年10期)2020-03-18
中华戏曲(2020年1期)2020-02-12
