
网联车辆协同编队控制系统研究*
2020-07-27 09:34马芳武王佳伟沈昱成刘振泽
汽车工程 2020年7期
马芳武,王佳伟,杨 昱,沈昱成,刘振泽
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130022; 2.吉林大学通信学院,长春 130022)
前言
面对汽车产业在智能化、网联化和电动化领域的巨大变革,新一代汽车对安全、舒适和节能提出了更高的要求。作为智能驾驶的典型应用,自适应巡航控制可兼顾安全、节能需求[1],实现车辆的跟随控制,在一定程度上降低了驾驶员工作强度。随着车联网技术的不断成熟与普及,多车协同编队控制为提高交通效率、保证出行安全、优化乘坐体验提供了新的解决方案。
相较于传统ACC,多车协同编队控制在信息获取方面取得重大突破,可通过车间通信,实时、准确、快速地获得车辆编队中各车的位置、速度、加速度等信息,并结合对自身状态的检测,来实现更稳定、更安全的决策判断与更经济、更环保的输出控制[2]。
目前国内外学者纷纷对车辆编队控制开展了深入研究,并取得一定成果[3-4]。文献[5]和文献[6]中基于车联网设计了多种队列通信拓扑结构,并采用图论的分析方法总结不同拓扑结构对队列控制的影响,进行稳定性设计研究。文献[7]中主要针对队列控制中的防碰撞问题进行了建模分析,并充分讨论了通信延时和车辆非线性对控制系统的影响。文献[8]中利用车联网通信的优势,构建基于前车和后车信息的队列跟随控制策略,并通过系统稳定性设计实现出色的控制效果。文献[9]和文献[10]中面对车辆编队控制系统在实际应用过程中所面临的通信干扰和车辆状态摄动影响,从理论和硬件在环层面分析验证队列控制的稳定性。文献[11]中搭建了基于DSRC和毫米波雷达的联网巡航控制平台,通过分层式控制结构实现车辆稳定跟随行驶。综上所述,稳定性问题在车辆编队控制系统设计开发过程中占据着较为核心的地位,并存在大量技术难点有待挖掘。
为此本文中考虑车辆惯性时滞和通信延时的影响,开展了队列跟随稳定性设计,有效保证队列行驶的安全性与舒适性。首先基于车辆线性假设,构建1阶惯性时滞的车辆动力学模型,并根据跟随误差反馈控制建立车队跟驰策略;接着基于车辆动力学模型和车队跟驰策略,分析编队控制系统内稳定性和队列稳定性的约束边界及稳定区域,并分析不同控制器参数对车辆编队稳定性的影响,得到较优的控制器参数;最后搭建基于Matlab/Simulink的仿真模型,针对3种典型工况验证系统的控制性能。
1 编队控制模型建立
车辆编队的纵向跟驰模型其节点动力学受到很多非线性因素的影响,主要有空气阻力、轮胎特性、电机特性等。鉴于本文重点是队列控制器的设计,因此将车辆简化成线性模型,并做出以下假设:
(1)车辆在行驶过程中不存在换挡操作;
(2)车辆直线行驶不考虑侧向力的影响;
(3)轮胎附着条件良好,不存在滑移现象。
因此将车辆纵向动力学表示成1阶惯性延时模型,即车辆的实际加速度与期望加速度之间存在1阶惯性时滞,可表示为

式中:xi、vi、ai分别表示车辆 i的位移、速度和加速度;ui表示车辆i的期望加速度输入;τ表示车辆惯性时延。
为保证车辆能够快速、准确跟随前车速度,采用前馈加反馈的控制策略来决策车辆期望加速度。该策略将前车加速度信息作为前馈量实现状态的快速响应,并将跟随误差以及速度差作为反馈量来缩小控制误差。在进行车辆编队控制的纵向跟随模型构建过程中,本文中采用了非线性队列跟驰模型,并充分考虑了车辆惯性时滞和通信延时的影响,见式(2)。
式中:hi为第i号车与前车之间的距离;V(h)为不同跟车距离下的期望车速;σ为通信时延;α、β、γ分别为控制器增益值。
针对跟车距离对期望加速度的影响,模型中定义了非线性间距控制模型,即
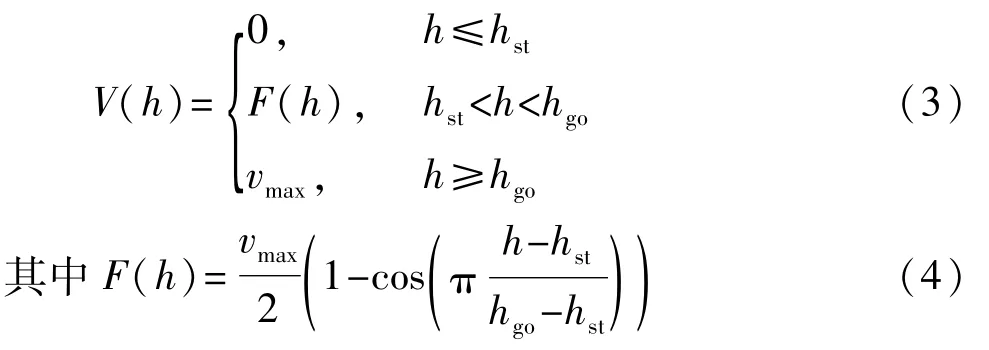
图1 非线性间距控制模型
当车距小于hst时,车辆的期望速度将为0,当跟车距离大于hgo时车辆的期望速度将为最大车速vmax。参数定义为:vmax=30 m/s,hgo=35 m,hst=5 m。可以得到如图1所示的期望速度V(h)与跟车距离之间的关系。
该模型具有以下特点:当跟车距离小于5 m时,车辆将快速制动避免与前车碰撞,保持一定安全距离;当跟车距离大于35 m时,车辆将加速行驶以期在最快车速下行驶,并可避免驱动力过大现象出现。
2 稳定性分析
车辆编队控制稳定性分析主要包括两部分:内稳定性和队列稳定性。内稳定性要求车辆编队在受到外界激励后能在一定时间内将跟随误差衰减至零;队列稳定性要求车辆编队在受到外界干扰后,队列前部跟随误差在向队列后部传递过程中逐渐变小。
2.1 内稳定性分析
针对车辆编队的内稳定性,当头车具有状态波动时,控制器能在一定时间后使所有车辆维持到稳定的行驶速度,并保持合理的跟车距离,即

式中:v*和h*分别为稳定速度和跟驰距离。
由于本文中所采用的车距控制策略呈现非线性,因此在考虑车辆编队内稳定性时选取最易失稳的工况,即F(h)斜率最大处[12]。因此系统最容易失稳的工况出现在v*=15 m/s,h*=20 m,此时的斜率N=π/2。经过线性化处理后,式(6)可表达为

综合式(1)与式(7),通过拉氏变化可以得到前车到后车的误差传递函数Γ(s):

为保证车辆编队的内稳定性,系统误差传递函数的特征根必须均具有负实部(全都落在虚轴左侧)。而当惯性时滞以及通信延时确定时,能否使系统特征根均具有负实部取决于增益α、β的选择。

将 s替换成 iω(ω>0)后,可以得到增益 α、β的边界值:

根据Stepans公式[7],可以得到本文设计的队列跟随模型的稳定性条件是增益α、β处在由式(9)和式(10)所包围的区间内,即当增益α、β越过内稳定性区域后,系统的特征根将穿过虚轴落在虚轴右平面,使系统出现失稳现象。
2.2 队列稳定性分析
在保证队列的内稳定性后,可以使车辆编队在受到外界激励一段时间内恢复稳定,但无法限制误差在队列中传递的特性。为避免由于头车的微小输入,导致队尾出现大幅度振荡现象,队列稳定性分析至关重要[12]。以下给出了队列稳定性的充分必要条件:
式(13)可以保证在 ω=0附近,G(ω)>0成立,但仍可能在ω>0出现极小值。考虑到ω2并不影响P(ω)的符号,可用 G(ω)来分析系统的队列稳定性。为避免出现极小值小于0的现象,以下给出对极小值的约束条件:

结合以上推理,可以得到队列稳定性的控制器增益边界。
3 控制器参数设计
以上给出了实现车辆编队控制系统内稳定性与队列稳定性的充分必要条件,容易得出以下结论:系统内稳定性仅与系统反馈控制的闭环特性相关,队列稳定性受到系统前馈量和反馈量的共同影响。如式(10)、式(13)和式(15)所示,队列的内稳定性和队列稳定性边界由τ、σ、α、β、γ5个参数共同决定。其中τ、σ为系统固有参数,由车辆动力学性能以及通信性能决定。因此将综合考虑τ、σ对系统稳定性的影响,匹配合理的α、β、γ参数,以设计满足车辆编队控制系统内稳定性与队列稳定性的控制器。
本文取τ=0.25、σ=0.1进行系统稳定性分析,图2给出了不同前馈值γ下的队列稳定性边界。
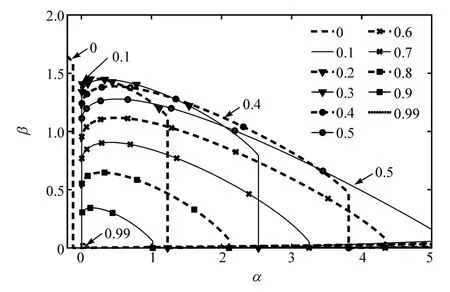
图2 前馈增益γ对系统队列稳定区域的影响
图2示出误差反馈增益α、β的队列稳定区域随着前馈增益γ的变化规律。不难发现,当γ值小于0.1时,无法找到两个正的控制参数α、β使系统保持队列稳定性。同时当γ值过大(逐渐接近1时)控制参数α、β的稳定性区域会逐渐缩小,并最终消失于零点。此外,控制器参数α的队列稳定上界受γ变化的影响较大。随着γ值变大,其稳定上界呈现先变大后变小的趋势,并当γ=0.5时,其上界达到峰值。综上所述,当γ取值为0.5时,其余两个控制器参数的队列稳定区域最大,间接地提高了系统的稳定裕度。因此在本文以下的仿真分析中,γ=0.5。
图3给出了当γ=0.5时,控制器参数α和β的内稳定性及队列稳定性边界。其中粗虚线和Y轴是根据式(9)和式(10)得到的系统内稳定性的边界条件。同时考虑到β主要是通过反馈来缩小跟随误差,因此从理论而言,β应取正值。因此,当控制器参数落在粗虚线和X、Y轴所包围的区域内,便能保证系统内稳定性。此外,细虚线给出在ω→0+附近保证系统队列稳定性的边界,细实线给出ω>0时系统保持队列稳定性的边界。根据图3可以看出,满足队列稳定性的参数可行区域相比于内稳定区域更小,并落在内稳定区域内。为同时满足内稳定性和队列稳定性,控制器参数必须落在细虚线、细实线和X轴所包围的区域内。在图3中取了12组控制器增益值,如表1所示。
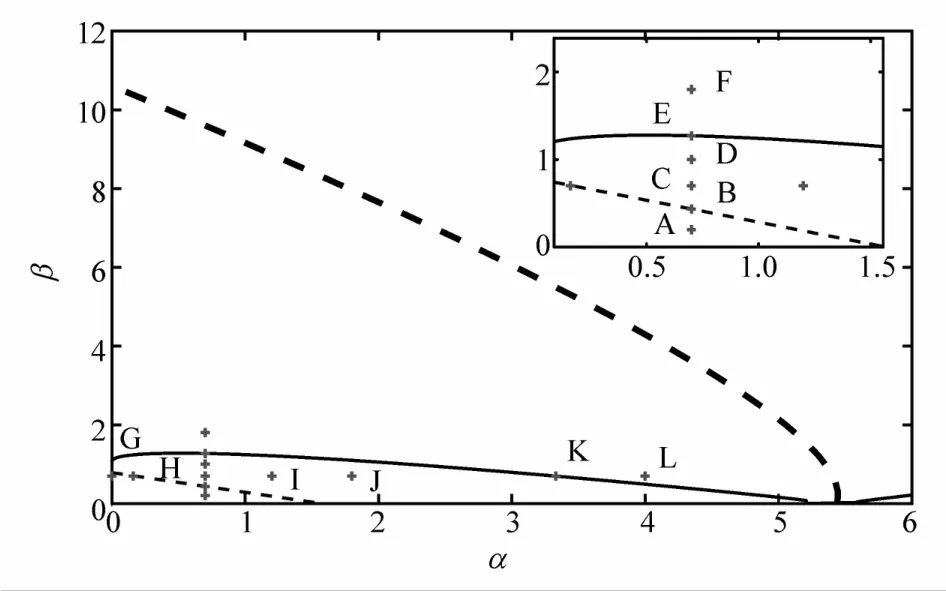
图3 γ=0.5时系统稳定区域

表1 控制器增益
图4给出12个点处的|Γ(iω)|随ω变化的曲线。当控制器增益落在队列稳定性边界上(E,K)时,系统|Γ(iω)|分别在 ω2、ω4时达到 1,即处于临界稳定状态。当控制器增益落在上文推导的队列稳定区域外(A,F,L),系统|Γ(iω)|分别在 ω1、ω3、ω5时达到最大值,并远大于1。其中B、H、G虽然在稳定性边界上甚至在队列稳定性区域外,但由于影响不是很显著,无法在图中清晰地分辨出来。
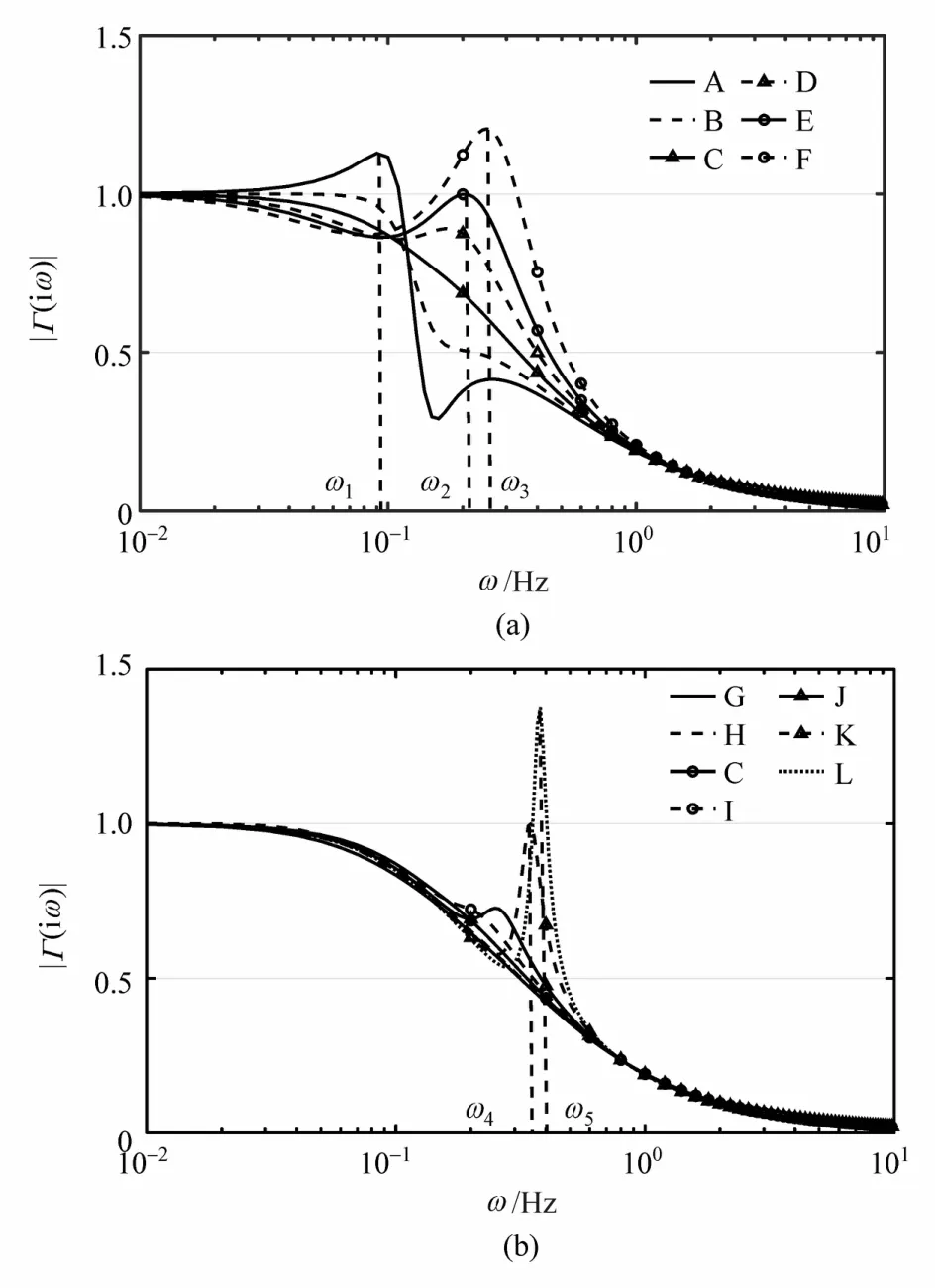
图4 |Γ(iω)|随 ω的变化曲线
图4(a)给出6组误差反馈增益α保持一致,而增益β不断增加的控制器参数。不难发现随着β的增加,该系统低频部分的|Γ(iω)|值不断减小,而中频部分的|Γ(iω)|值有着明显的增加,且各条曲线之间差距较大。图4(b)给出了6组误差反馈增益β保持一致,而增益α不断增加的控制器参数。该变化并没有对低频部分的|Γ(iω)|值产生明显影响,而中频部分的|Γ(iω)|值呈现增长的趋势。
综上所述,可以得出以下结论。
(1)反馈增益α对系统队列稳定性影响较小,且过大的α会使系统在中频处失稳,而过小的α值容易使β取值受限。
(2)反馈增益β的变化可以明显调节系统不同频率的响应特性。
4 仿真验证
基于Matlab/Simulink仿真环境,建立了6辆车的多车协同编队控制模型,仿真参数如表2所示。
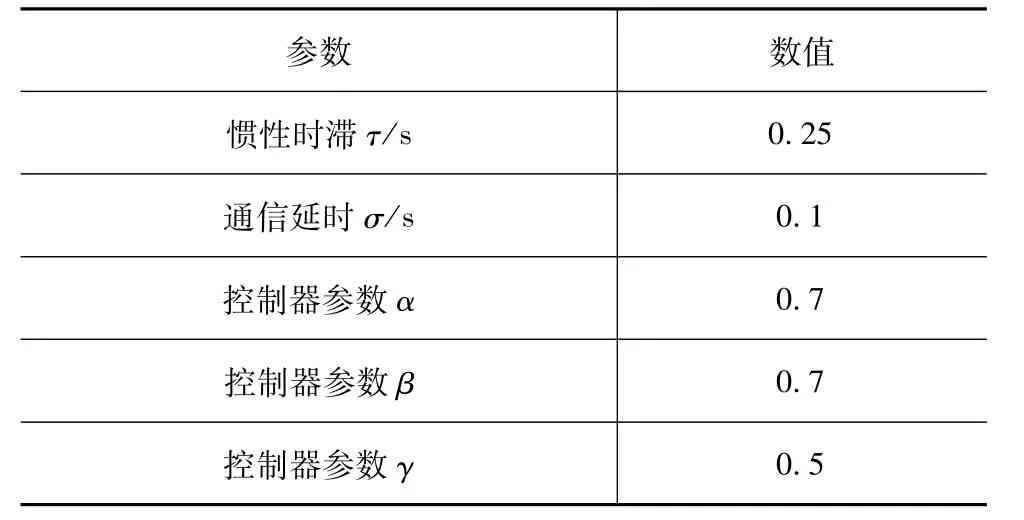
表2 仿真参数
为充分验证该车辆编队控制算法的合理性,选用了3种仿真工况:
工况一:系统处于零初始状态,头车V0有一定量速度波动,验证平稳跟车过程;
工况二:系统处于零初始状态,头车紧急制动,验证跟车的安全性;
工况三:系统处于非零初始状态,验证车辆编队恢复稳定状态的能力。
针对工况一,将所有车辆的速度设为15 m/s,车车间距设为20 m,并给头车添加幅值为0.1 m/s2的扫频加速度输入,考虑到车辆的惯性延时环节可以过滤掉高频的振荡,因此加速度输入的频率选为0~3 Hz。
图5为工况一时的车辆编队控制系统响应。由图5看出,由于通信延时的存在,后车的加速度控制均存在一定程度上的滞后,导致后车与前车在速度上有所差异。图5(a)中给出的6辆车的加速度跟随曲线,头车的扫频加速度波动在往车辆编队后部传递的过程中,其波动的幅值不断减小。以车辆编队中第5辆跟随车为例(V5),该车在前几秒加速度值均较小且加速度均大于0,呈现出缓慢加速的状态,不存在急剧加速、制动的波动现象。在7 s后(头车具有大于1 Hz的加速度波动),V5加速度基本保持在0,呈现出匀速行驶。
综上所述,当头车具有扫频加速度波动频繁加速、制动时,跟随车辆基本不会出现频繁加减速的现象,只表现出缓慢加速并最终匀速行驶的状态。因此文中设计的车辆编队控制系统能够针对不同频率的头车扰动,实现队列平稳跟随,其舒适性表现突出。
针对工况二,将所有车辆的速度设为15 m/s,车车间距取为20 m,并在1 s时给头车添加-5 m/s2的减速度,在4 s时头车将完全停止。
图6为工况二时的车辆编队控制系统响应。由图可知,当头车紧急制动时,跟随车辆将快速响应前车的速度变化,始终保持和前车的安全距离,并在该仿真工况中有效避免了车辆碰撞现象的出现。图6(a)给出了各车辆的制动减速度,同时表3给出了加速度的峰值与均方根值。不难发现车队中各车的最大制动强度的幅值不断减小,且并没有出现由于过度制动导致的制动后再加速的失稳现象。该现象充分证明了文中设计的控制器能保证队列稳定性。以车辆编队中第5辆跟随车为例(V5),其制动加速度构建较为平缓,不存在急踩制动的现象,在5.2 s时制动减速度才达到峰值-3.096 m/s2。同时在该仿真时长内其减速度均方根值仅为1.173 3 m/s2,相比于头车减小了39.26%,可以在一定程度上提高制动的舒适性和操纵稳定性。
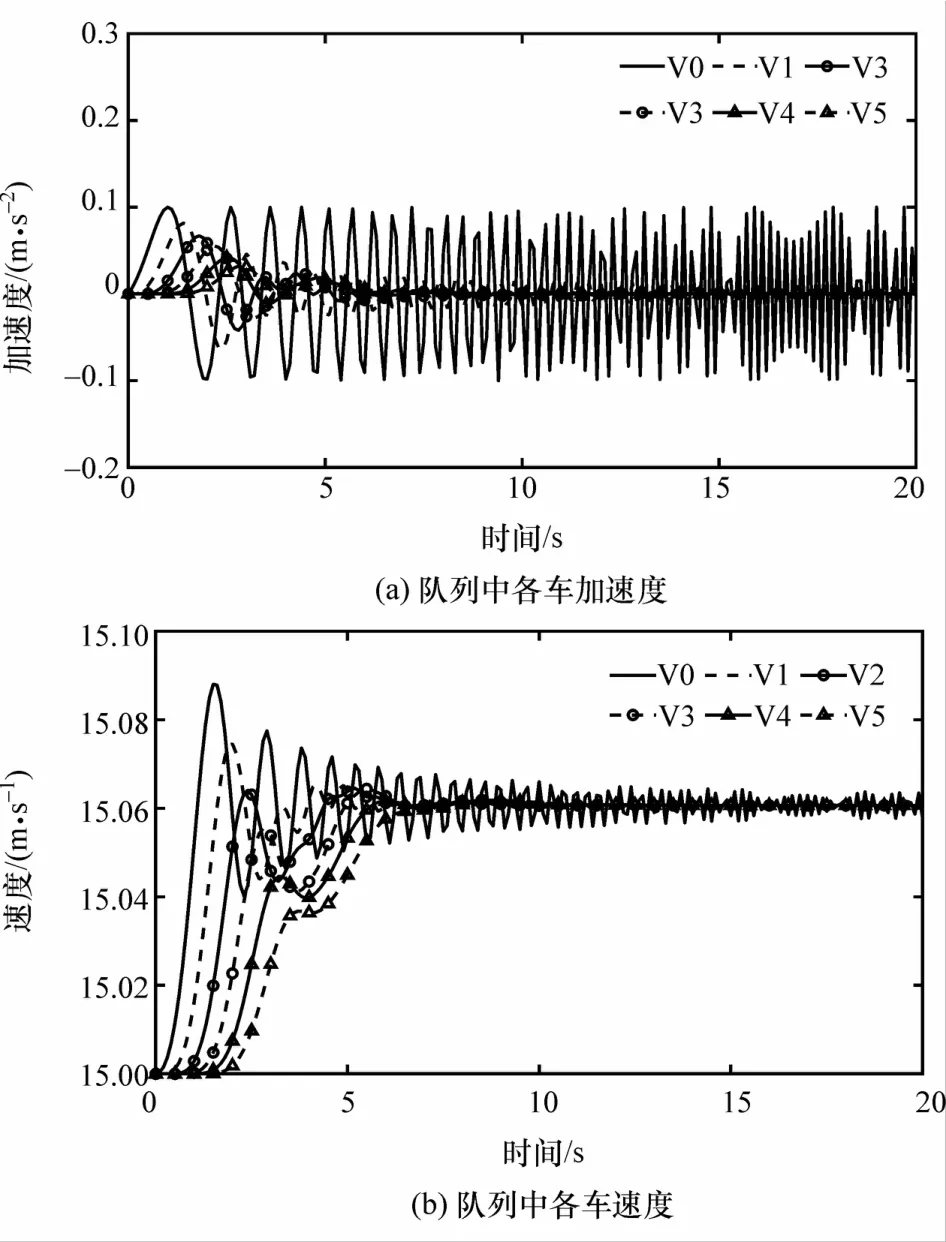
图5 工况一时的车辆编队控制系统响应
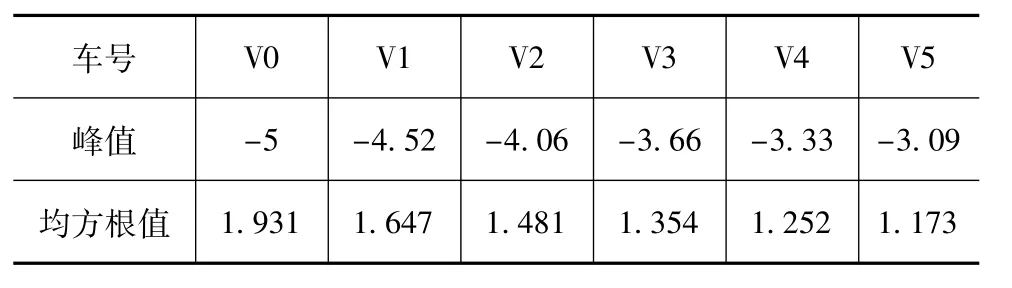
表3 车辆加速度峰值和均方根值 m/s2
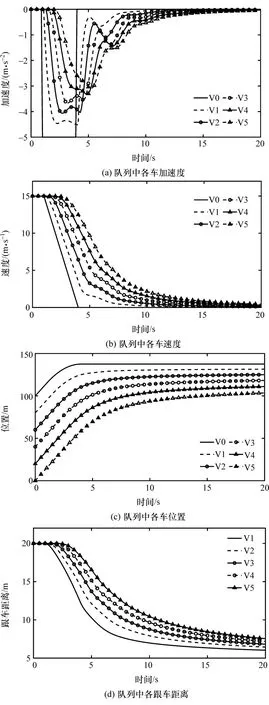
图6 工况二时的车辆编队控制系统响应
针对工况三,将所有车辆的速度设为15 m/s,车车间距按照表4所示。
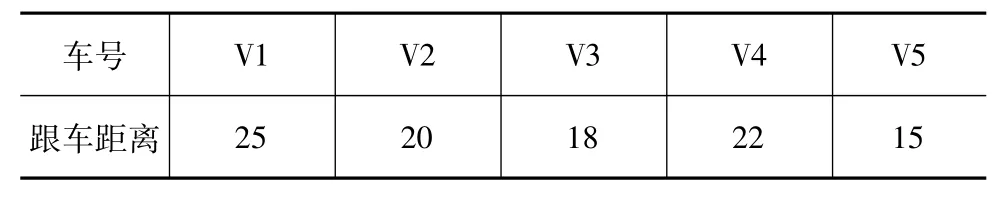
表4 初始跟车距离 m
图7为工况三时的车辆编队控制系统响应。由图可知,当车辆编队处于非零初始状态时,各车能迅速调整自身车速,在8 s时能基本使系统恢复到稳定状态。以第5辆跟随车为例(V5),首先由于跟车距离远小于期望跟车距离,因此在前几秒采取制动行为。但后期由于第4辆跟随车(V4)加速和自身减速的双重作用,导致跟车距离不断增大甚至超过期望跟车距离,因此从1.6 s起,V5的制动减速度不断变小,并在2.3 s处采取加速操作。而以第1辆跟随车V1为例,由于头车V0匀速行驶,其跟车距离不至于出现较大幅度的变化,因此在缩短跟车距离的过程中不至于出现车速远小于头车速度的现象。以上分析可以充分揭示图7(b)中V1、V2、V4的跟车距离在向稳态跟随状态转变的过程中基本可以实现无超调量或小超调量的控制,而V3和V5的跟车距离控制存在一定程度上的超调。
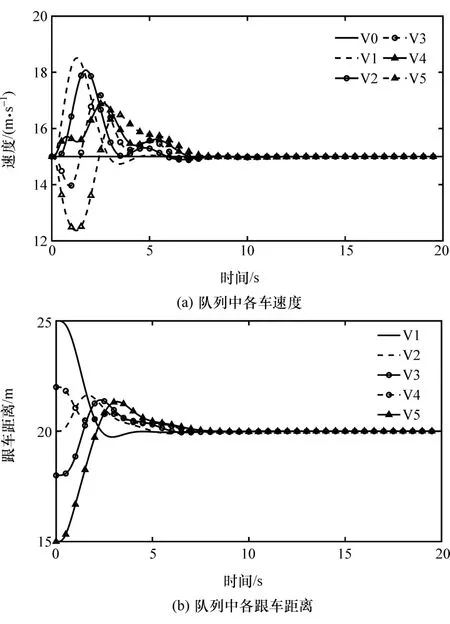
图7 工况三时的车辆编队控制系统响应
纵观从非零初始状态向稳态状态转变的过程,该车辆编队控制系统基本能够对各车实现高效、稳定的控制。
5 结论
充分利用车联网在车辆信息传递中的有益效果,构建了车辆编队跟随策略,以期实现车辆编队中各车辆在面对外界扰动输入时,能够保证队列稳定、安全行驶。基于车辆编队跟驰策略,构建了包含车辆惯性时滞、通信延时的系统误差传递函数,并给出针对不同通信延时并满足车辆编队内稳定性和队列稳定性的车辆编队控制器参数稳定区域。最后在控制器参数匹配的基础上,构建Matlab/Simulink仿真模型,针对3种输入工况进行车辆编队控制系统的性能分析,并得出如下结论。
(1)该车辆编队控制器能够快速减小前车波动对后车的影响,保证车辆编队能够在外界扰动下稳定行驶,并保证行驶舒适性。
(2)该车辆编队控制器能够在头车采取紧急制动工况下,实现跟随车辆的避撞控制,同时可以实现制动力平缓构建,提高制动舒适性以及制动时的操纵稳定性。
(3)该车辆编队控制器可以针对非零初始状态,快速调整跟随车辆速度以实现队列稳定控制。
在未来的研究工作中将着重研究异质交通流以及车辆参数摄动对系统鲁棒性的影响,并建立车辆底层控制策略,开展实车实验。
猜你喜欢
心理学报(2022年10期)2022-10-12
北京航空航天大学学报(2021年6期)2021-07-20
汽车工程(2021年12期)2021-03-08
科学导报·学术(2020年26期)2020-10-21
布达拉(2018年5期)2018-05-14
西江文艺(2017年15期)2017-09-10
青年文学家(2016年32期)2016-12-23
意林(2009年12期)2009-02-11
航空知识(2001年5期)2001-06-12
