基于检测无迹信息融合算法的多传感融合方法*
2020-07-27 09:34:38刘志强张光林郑曰文贺晓宇
汽车工程 2020年7期
刘志强,张光林,郑曰文,贺晓宇
(江苏大学汽车与交通工程学院,镇江 212013)
前言
交通环境日益复杂,在高级驾驶员辅助系统和自主驾驶中,由于单一传感器对目标车辆识别准确率低,越来越不能满足人们的安全要求[1-2],因此,基于多传感数据融合的车辆识别与跟踪研究受到越来越多的关注。
车辆的运动轨迹是非线性的,因此对于非线性系统的状态估计是车辆识别中信息融合的基础。而信息融合中,初始融合算法在近似过程中继承扩展卡尔曼滤波算法[3]的1阶和2阶截断误差,对目标的局部估计产生较大影响,这个问题可以通过Sigma点滤波器[4]或离散差分滤波器[5]来解决。针对此问题,文献[6]和文献[7]中提出了基于无迹卡尔曼滤波的无迹信息融合(UIF)算法,该算法避免了非线性函数雅可比矩阵的复杂运算,使高斯分布的噪声得到抑制,然而该算法受外部环境影响较大。车辆跟踪的另一个挑战是:由于传感器节点感知、通信连接失效和节点移动性等原因,产生信号稀疏和随机动态通信拓扑不稳定的问题[8],进而导致传感器间通信效率低,造成信号的延迟处理和丢包等现象。针对以上问题,文献[9]中提出了一种基于回路系统的高效迭代方法,该方法在处理时滞信号时精度较高,但算法复杂,工程实践中难以实现。文献[10]中针对稀疏无线传感器网络中的传感器信号丢包现象,采用加权平均一致性算法对UIF进行改进,能够在稀疏无线传感器网络中完成跟踪车辆目标的任务,但可能由于通信拓扑无向图的连通性间断而失效。
基于此,本文中采用无人驾驶数据感知环境的典型配置[11-12]——毫米波雷达与摄像头组合对目标进行数据采集。为提高车辆自主导航的准确性,本文中基于扩展信息融合(EIF)和无迹信息融合(UIF)原理,提出了一种无固定子滤波器形式的分布式融合框架。针对传感器数量有限、信号延迟、丢包等问题,提出了一种改进的无迹卡尔曼滤波算法——检测无迹信息融合算法(checking unscented information filters,CUIF),该算法通过多传感器检测系统建立相关的通信网络,通过收集的延迟信号的实时系统状态来补偿时间,获得每个传感器的最佳决策值,缩短传感器数据传输时间。
1 多传感器融合算法架构
摄像头和毫米波雷达传感器提供有效的车辆状态数据:毫米波雷达提供车辆位置和纵向速度数据(x,y,vy),摄像头提供车辆位置、大小和类型数据(x,y,width,type)。将数据信息进行预处理后在基于CUIF算法的融合中心进行融合,可获得目标车辆完整的位置、速度、大小和类型信息(x,y,vy,width,type)。基于CUIF算法的融合流程如图1所示。
基于CUIF算法的融合架构采用分布式结构,将来自不同传感器的轨迹相互关联并融合,以获得目标轨迹。本文中采用贝叶斯公式计算目标的状态估计,从而获得雷达和摄像头的次优解,即局部估计值,随后在分布式融合结构中组合传感器的局部估计值,以获得全局估计。
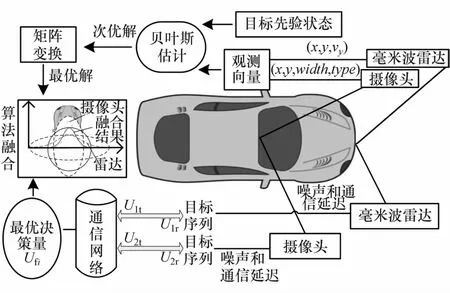
图1 基于CUIF算法的融合流程图
为消除融合中心更新方程中的测量信息,提出一种集中式融合方法,即通过将全局最优集中融合方法进行矩阵变换来融合测量数据;因此,集中式融合算法的一些优点也被继承。算法中的融合中心不仅须输入每个传感器的滤波器估计值,还有预期的估计值,该信息可通过一般滤波算法获得;因此,该融合算法不依赖于单个传感器的特定滤波器算法,各种非线性滤波算法都可以在融合中心中实现。
2 基于CUIF算法的多传感器信息融合
对车辆系统进行建模如下:

式中:xk为k时刻n维状态向量;为k时刻第i个传感器的观测向量;f(xk-1)为系统的过程函数;hi(xk-di)为第 i个传感器的观察时间延迟;di为时间延迟参数,当无法估计时间延迟时,di被假定为常数且0≤di≤1为第i个传感器的观测损失函数,满足伯努利分布;wk-1为协方差 Q(k)为零均值高斯白噪声的过程噪声;为第i个传感器观察到的协方差R(k)为零均值高斯白噪声的测量噪声。
2.1 分布式融合过程
雷达和摄像头测量数据的状态估计值可以通过贝叶斯公式计算:
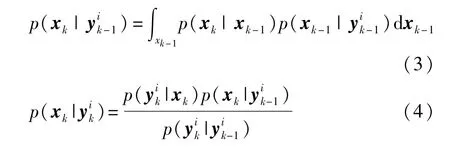
完成第k-1步的状态更新后,须计算下一个时间步骤的系统预测函数:

式中 Γi(xk,di,wk)为具有时间间隔 di的系统过程函数。
考虑到时间延迟的观测补偿为
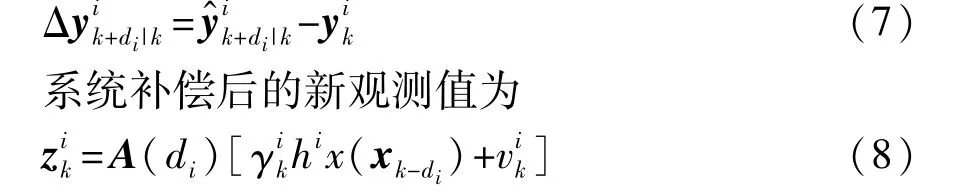
式中A(di)为维度观测延迟补偿矩阵。
基于式(1)和式(2)系统模型,具有无损观测值和延迟补偿的传感器的最优估计值可以用信息滤波来表示:

为消除融合中心更新方程中的测量信息,提出一种集中式融合方法,该融合方法通过矩阵变换得到全局最优估计值,则融合结果为
2.2 无迹信息融合算法
车辆目标信息状态向量与协方差为

式中:z^k为目标状态向量;为协方差。
使用扩展信息滤波算法(EIF),对上述两公式更新:

式中:lk为新息增益值;Plk为新息协方差矩阵;Hk为观测方程的偏导数;εk为滤波新息,满足 εk=yk-。
则预测的目标状态向量及其协方差定义为

利用无迹卡尔曼滤波算法定义目标扩展状态向量和协方差矩阵:

即可获得2na+1个样本点:
式中:λ=α2(na+κ)-na为比例参数,可用于调整 Sigma点和之间的距离,κ被设置为 0或 3-n;α决定了的分布,而 Sigma点通常设置为较小的正数;对于高斯分布,β被设置为2。
然后通过无迹变换获得新的预测方程:

2.3 分布式检测系统
为补偿系统的丢包、误报警等保真度损失,增添了分布式检测系统[13],在这个系统中,每个传感器都包含2个单元:一个检测单元(Di)和一个数据融合单元(Fi)。传感器间的通信结构如图2所示。
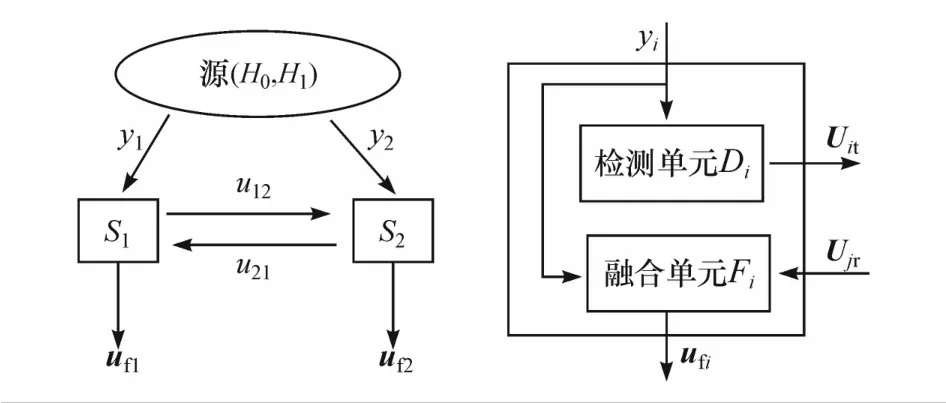
图2 两传感器分布式检测系统
图中,原假设H0表示不存在目标的信号,备择假设H1表示存在目标的信号;yi为第i个传感器Si的测量数据,i=1,2;Uit为 Di产生的决策向量,Ujr为数据融合单元Fj产生的决策向量,Uit和Ujr通过同一个通信网络传输,该网络负责传输对应传感器S的决策向量;ufi为每个传感器Si的最终决策量。
每个传感器的最小预期值计算步骤如下[14]:
(1)第i个传感器Si接收观测数据为yi,假设观测数据是假设条件H下的独立随机事件:

(2)通过yi和Di计算第n-1次局部决策值uij(i≠j):

式中uij为从Di获得的中间决策,由Sj用于获得最终决策ufj。
(3)根据yi和Uir可以得到每个Fi的最终决策ufi:

(4)J(ufj,H)为 Sj做出最终决策 ufj的代价,其中H为真的假设。可得

不等式表示发生判断错误要比不发生错误付出更高的代价。
(5)进一步假设

通过步骤(1)~步骤(5)可以得到最优策略γfi和 γji,然后

最后,由分布式融合算法和多传感器检测方案可以得到多传感器融合结果为
3 仿真与试验验证
3.1 仿真验证
为验证多传感器融合模型的准确性和有效性,本文中采用CarSim与Simulink联合仿真开展算法验证和比较分析,在CarSim中将路面附着系数设置为0.5,试验车速设置为 40 km/h,采样时间为0.01 s。根据雷达和摄像头传感器的测量特点,在仿真数据中加入噪声,并单独加入通信延时,然后将不同维的2组目标序列送入融合中心进行信息融合和状态估计。仿真流程如图3所示。
本文中假定雷达和摄像头的测量过程是相互独立的,利用EIF、UIF和改进的CUIF算法对信息融合中心进行仿真,3种算法对同一辆汽车进行持续跟踪,从而检测算法的准确率。
为了突出延迟补偿的效果,仿真中不考虑启动距离和信号损失,车辆目标都在仿真的初始阶段进入毫米波雷达和摄像头的检测范围。图4和图5分别为采用不同算法时自车与目标之间的横向距离和径向距离的误差。
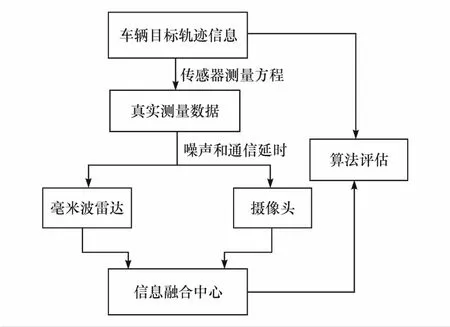
图3 仿真流程图
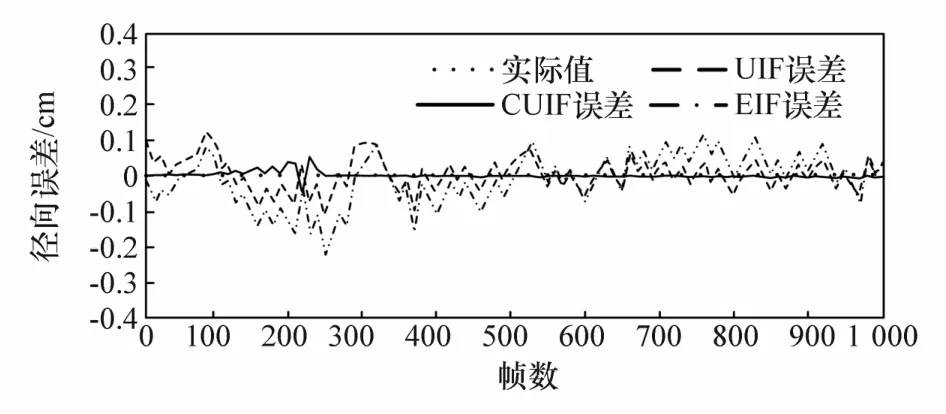
图4 车辆目标径向距离误差分析
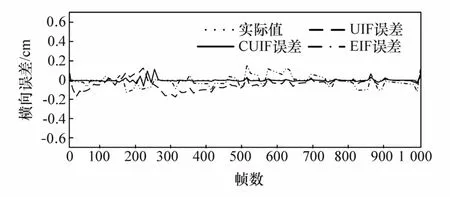
图5 车辆目标横向距离误差分析
从图4和图5可以看出,在目标车辆横、径方向的误差分析中,EIF和UIF仍具有较大误差波动。CUIF利用自动检测系统的时间延迟和数据包丢失功能,通过收集的延迟信号的实时系统状态来补偿时间,从而在更高程度上消除了分组丢失信号对检测精度的不利影响。从图中可以看出,与其他融合算法相比,随着时间的推移,本文提出的CUIF算法在横、纵向距离的相对误差更小,鲁棒性更强,保证系统在实际应用中更加准确地追踪目标车辆的轨迹。
3.2 试验验证
本文中采用别克凯越轿车搭载德尔福76-77 GHz的ESR毫米波雷达和IFV-300智能摄像头对前方目标车辆进行数据采集,如图6所示。
同时利用Matlab中的可视化模块和Simulink工具箱联合搭建目标车辆追踪验证平台[15],如图7所示。

图7 前方车辆识别验证平台
为了更好地验证该融合算法,本文选定上午10:00~12:00时间段进行试验,避免车辆高峰期对试验造成不必要的影响,选取镇江市金港大道路段作为试验场地。采样一定次数后,目标车辆横、纵向距离的状态估计结果如图8所示。
通过图8的融合轨迹可以看出,该融合算法可以得到较好的状态估计值,能够实时检测前方目标车辆,测量精度相对于单一传感器有了很大改善,有助于提高车辆的主动避撞性能。
对CUIF、EIF和UIF算法在时间延迟和丢失率上进行了定量比较,如表1所示。EIF和UIF算法相比于单传感器在目标丢失率方面有了很大改善,但在时间延迟方面改进不大。相比于EIF和UIF,CUIF算法在目标丢失率方面减少了10%以上,并将时间延迟缩短至5 ms,满足系统对实时性的要求。
4 结论
(1)针对单一传感器前方目标车辆识别准确率低的问题,考虑成本和车载传感器特点,本文中提出了一种基于毫米波雷达和摄像头信息融合的目标识别方法。
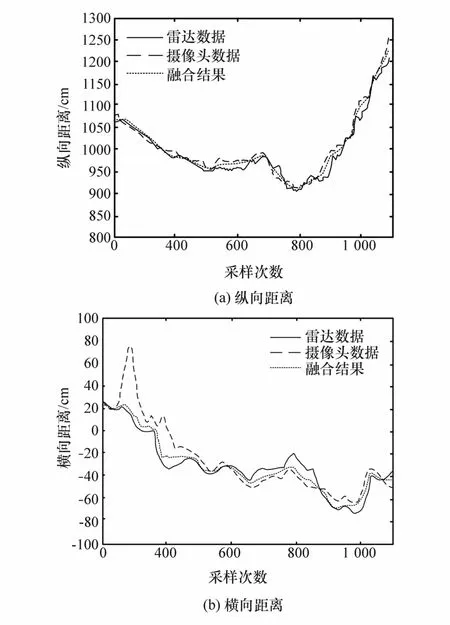
图8 横、纵向距离状态估计结果
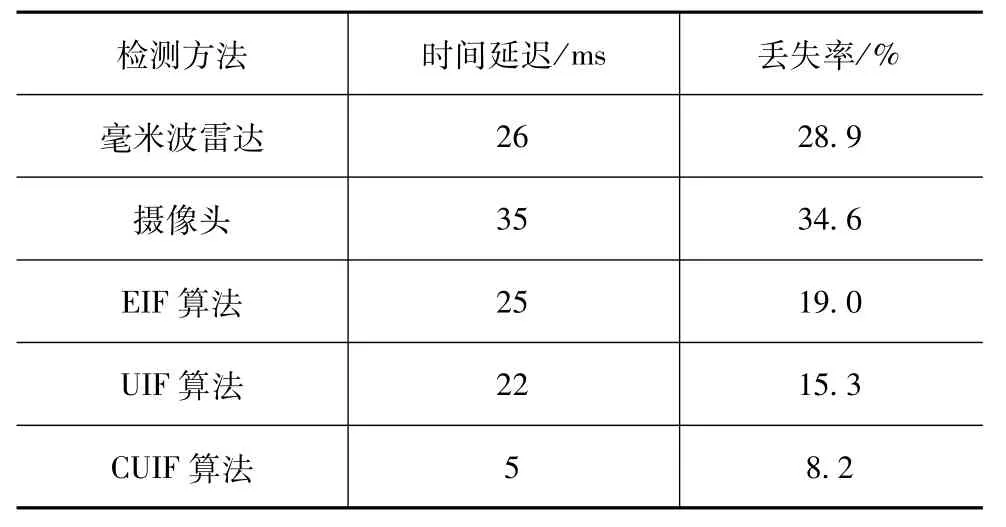
表1 各种检测方法性能对比
(2)针对复杂环境下传感器信息延迟和丢包的问题,提出了基于EIF和UIF的CUIF算法来估计车辆系统状态,并建立了相应的通信网络,使传感器数据传输的时间延迟缩短至5 ms,丢失率相对于其他算法也提升了10%以上。
(3)仿真和试验结果表明,相比于EIF和UIF融合算法,CUIF算法充分考虑了信号质量,有效提升了检测准确率。从试验结果可以看出,该融合算法在对目标车辆的横、纵向距离的状态估计方面较单一传感器有了明显改善,可以满足对动态目标的识别和跟踪要求。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
小太阳画报(2018年3期)2018-05-14 17:19:26
成都信息工程大学学报(2017年4期)2018-01-22 02:08:20
电测与仪表(2017年20期)2017-12-19 05:14:28
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
光学精密工程(2016年4期)2016-11-07 09:05:35
汽车文摘(2015年11期)2015-12-02 03:02:53
汽车维修与保养(2015年8期)2015-04-17 03:32:59