
基于受限参变率的飞翼无人机舵面阵风减缓控制
2020-07-25 09:01孙逸轩白俊强刘金龙孙智伟
北京航空航天大学学报 2020年7期
孙逸轩,白俊强,2,*,刘金龙,孙智伟
(1.西北工业大学 航空学院,西安710029; 2.西北工业大学 无人系统技术研究院,西安710029;3.西北工业大学 无人机研究所,西安710029)
降低结构质量及采用大展弦比飞翼布局从而提高续航性能和隐身特性成为高空长航时(High-A ltitude Long-Endurance,HALE)无人机的设计趋势[1],然而这些设计特点导致无人机机翼结构动力学模态频率降低,存在与纵向短周期模态发生耦合的潜在风险,加剧了无人机对阵风载荷的敏感程度,恶化飞行品质。
发展考虑结构动力学与飞行动力学耦合效应的主动控制技术是改善机翼阵风减缓、确保飞行安全的有效手段。以线性二次型最优(Linear Quadratic Regulator,LQR)[2]和 线 性 二 次 高 斯(Linear Quadratic Gaussian,LQG)[3]控制为代表的现代控制理论是阵风减缓早期研究中的主流方法,但所得的控制器一般阶次较高,实际工程中难以实现。而近年来的鲁棒控制也只是在一定程度上考虑了参数不确定性,无法从根本上满足系统对参数大范围宽自适应性的要求。工程上需要考虑针对飞行包线内不同状态点的时变控制器,而以气弹系统某些飞行参数为函数的线性变参数(Linear Parameter Varying,LPV)控制模型能够反映系统的时变特性,相应的LPV阵风减缓控制器能够有效地进行时变控制,以达到扩大控制包线、提高控制性能的目的。然而,关于柔性飞行器气动弹性问题的LPV 控制研究还比较少。Balas等[4-5]首次将LPV控制应用于体自由度颤振抑制,针对X-56A无人机模型,选取归一化速度为变参数设计了LPV增益调度控制器,结果表明该控制器能够在飞行包线内稳定系统且有较好的性能均衡。提高阵风减缓效率是飞机气动弹性设计的目标之一,飞翼多舵面的气动布局就为其目标实现提供了有利条件。阵风减缓技术研究国外开展比较早,阵风减缓最主要的手段是控制飞机舵面偏转。1973年,美国在风洞中对B-52、DC-10和C-5A 等机型上进行主动控制技术试验,并开展了相关的阵风减缓飞行试验[6-8]。21世纪初,Karpel等[9]针对操纵不同舵面对阵风减缓效率的影响进行了相关研究,试验表明了翼下舵面和翼梢舵面比副翼的减缓效果更好。2012年,许晓平等[10]提出了一种基于直接力控制的阵风减缓方法,对比分析了不同舵面运动方式下对阵风减缓的效果。2017年,杨俊斌等[11]在风洞试验中进行阵风减缓控制技术的研究,将经典控制理论运用于不同舵面组合控制方法中,并将较优的舵面组合控制方法应用于低速风洞试验。陈磊等[12]还采用频域和时域方法进行气动伺服弹性系统建模,根据经典控制理论设计PI控制器,并对不同舵面进行阵风响应分析,得到采用多舵面设计的控制律效果优于采用单舵面设计的控制律的结论。但上述研究没有考虑参数变化率限制,使得设计的控制器进行舵面效能研究时具有一定的保守性;并且也忽略了进行主动控制时能量消耗的问题,在实际的工程之中飞行器总能量有限,优化各个部分对能量消耗的也显得尤为重要。
本文旨在结合Lyapunov函数方法和变参斜投影降阶算法,构建一种考虑参数变化率限制和模型降阶在内的LPV阵风减缓控制器快速实现方法。基于该方法针对Mini-MUTT飞翼无人机模型设计了阵风减缓控制器,研究不同单舵面及组合舵面对阵风减缓控制效果的影响,并从多个角度分析评价了不同舵面方案的阵风减缓效果,为LPV阵风减缓控制器在柔性飞行器气弹领域的工程应用提供参考。
1 基于M ini-M UTT飞翼无人机的LPV控制模型
飞翼无人机具有俯仰惯量低、纵向稳定性弱等问题,使其阵风响应对飞行参数的变化较为敏感,并且飞翼无人机的舵面较多,不同的控制策略下阵风减缓的效果不同。本文选取Mini-MUTT飞翼无人机模型[13],采用内侧襟翼与外副翼组合方式的控制策略,研究了其对控制器性能的影响。
传感器和舵面配置如图1所示,全机动力学参数如表1所示[14]。
基于本文提出的柔性飞行器气动伺服弹性建模方法并综合考虑无人机上传感器的安装和量测,选取襟翼(WRF1)与外副翼(WRF3)偏角和外部干扰为输入,全机的俯仰角速度ωf、浮沉加速度az和翼尖加速度atip为输出构建以来流速度U为调度参数的96阶初始状态空间模型。为了减小控制器设计的保守性,本文在构建网格化的LPV模型时,将调度参数 U 的变化率限制为[-10,10]m/s2。

图1 Mini-MUTT飞翼无人机传感器及舵面配置Fig.1 Sensors and control surface placement ofMini-MUTT flying-wing UAV表1 M ini-M UTT飞翼无人机动力学参数[14]Tab le 1 Dynam ic param eters of M ini-M UTTflying-w ing UAV[14]

注:E和G分别为刚度系数和扭转系数;Iz和Jx分别为机翼截面绕z轴惯性矩和机翼截面绕x轴极惯性矩。
2 考虑参数变化率限制和模型降阶条件的LPV阵风减缓控制器模型
LPV阵风减缓控制器建模及计算流程如图2所示,ρ为调度参数。
2.1 气动伺服弹性系统LPV模型
2.1.1 柔性飞行器气动伺服弹性建模
开环气动伺服弹性系统模型是控制器设计的基础。本文首先基于准坐标系下的拉格朗日方程、Peters有限状态时域非定常气动力模型和欧拉-伯努利梁有限元模型推导的考虑机翼为柔性部件、机身为刚体的柔性飞行器开环气动伺服弹性系统控制方程[15],如下:

图2 LPV阵风减缓控制器建模与计算流程Fig.2 LPV gust alleviation controllermodelling and calculation process

式中:Vf和ωf分别为飞行器的准速度和准角速度;q为机翼结构动力学模态对应的n维广义坐标;Rf和θf分别为飞行器在惯性坐标系下的位置矢量和欧拉角矢量;M11等为广义质量;H11等为广义阻尼;K33为广义刚度;frigid、mrigid和felastic分别为飞行器刚体受到的力、力矩和飞行器弹性体受到的力。
式(1)可简写为
考虑到实际工程中参数量测的问题,选取系统加速度信号为输出,则输出方程为

式中:x为系统状态;u为输入向量;ρ(t)为实时可测的调度参数,简记为ρ,对于柔性飞行器而言,其可以是密度、马赫数和动压等变参数;状态空间矩阵A、B、C和D为关于调度参数ρ的已知函数。
为了更好地对LPV系统进行分析与综合,需要建立合适的模型表示方法。目前,LPV模型表示方法主要有分式线性变换法[16]、网格线性化法[17]和仿射多胞参数依赖形方法[18]。本文采用网格化的LPV模型表示方法,主要基于以下原因:一方面飞行器的气弹模型往往通过其非线性模型在多个飞行状态下线性化得到;另一方面,网格化的LPV模型可以为算法实现提供良好的模型运算基础。
如图3所示,以飞行包线内典型设计点为基础的网格化LPV模型为例,图中调度参数分别为飞行高度和马赫数。所谓的网格化LPV模型是指将调度参数域离散为一系列的网格点,然后在每个网格点邻域内对非线性模型作线性化,最后通过这些线性模型的组合来近似描述非线性模型。
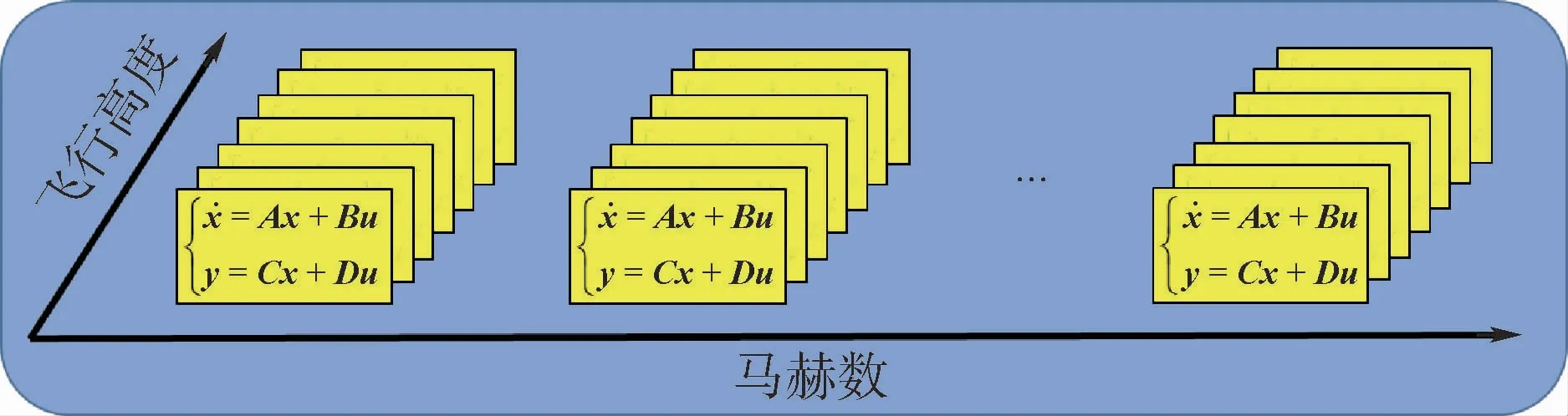
图3 定义在矩形网格的LPV模型Fig.3 LPV model defined in rectangular grid
2.2 LPV模型的变参斜投影降阶
本文建立的柔性飞行器刚弹耦合气动弹性理论分析模型是通过耦合气动、结构和飞行动力学推导得到的,模型初始阶次随着结构单元划分的数目增加而增高,可达上百阶。相应地,分析和综合模型需要求解大量的线性矩阵不等式(LMIs)。为了得到面向控制的模型,需要在控制器综合设计之前对高阶的初始模型进行降阶处理。LPV模型是参数域内所有状态点处模型的集合,因此这类模型降阶的主要难点在于解决如何保证状态一致和计算量大的问题。针对以上问题,本节结合Theis等[19]的工作将投影法应用到LPV模型的降阶中,形成一种适用于网格化LPV模型的变参斜投影降阶算法,能有效解决以上2个问题。
LPV降阶模型定义如下:


2.3 考虑参数变化率的LPV控制设计
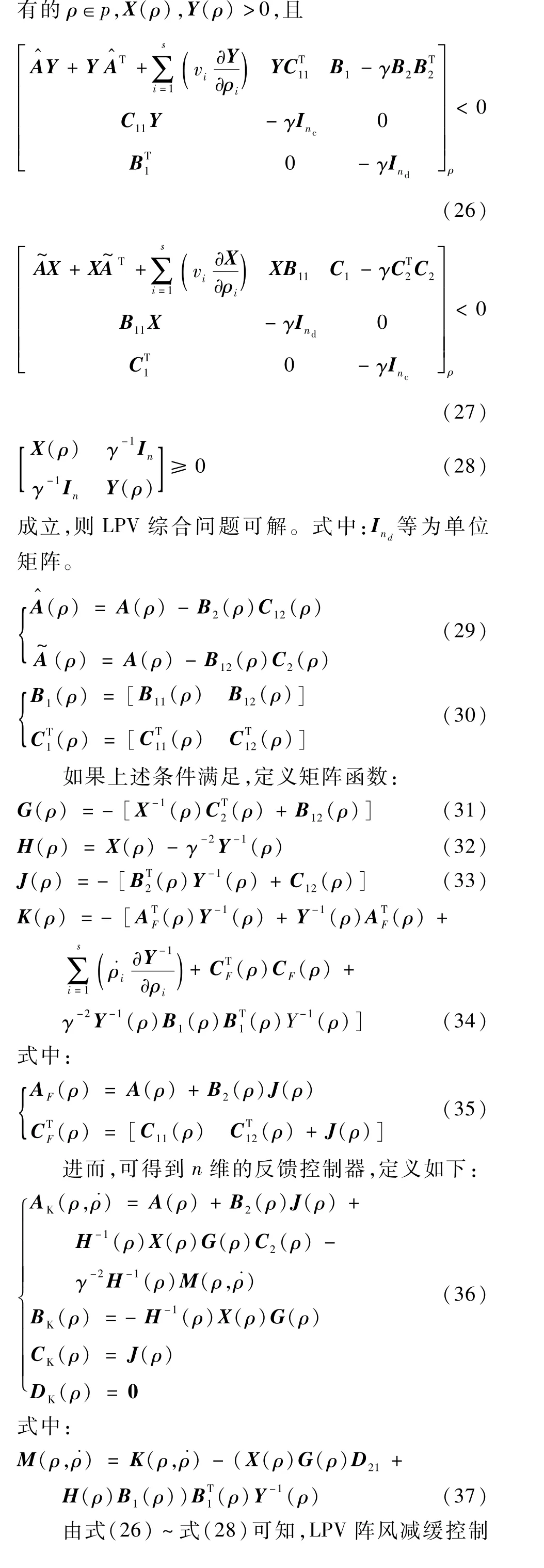
在实际的LPV控制系统中,为了降低控制器的保守性,可以在其设计过程中充分利用先验信息引入调度参数变化率的范围,即vL≤˙ρ(t)≤vH。本节首先基于参数依赖的Lyapunov函数方法,利用诱导L2范数分析法推导控制器综合条件,引入调度参数变化率的上、下确界。然后采用有限维近似方法求解综合条件。最后直接通过解析式建立控制器的状态空间方程,避免了求解LMIs潜在的数值问题。
假设被控对象的广义结构形式如下:


3 结果与讨论
3.1 降阶效果验证
系统的Hankel奇异值衡量了输入对状态的影响程度以及状态对输出的影响程度,该值小意味着这阶状态对输入输出贡献小。根据图4给出的Hankel奇异值分布,可初步选定降阶阶数为9。
利用本文建立的变参斜投影降阶算法,只需3 s即可完成模型降阶。在降阶前需要设置一个上限频率作为降阶过程的频率加权,以保证低频下模型的高保真性。图5对比了全阶模型和降阶模型在稳定状态点U=[17:2:27]m/s的幅频响应(V为来流速度,[17:2:27]m/s表示每隔2m/s有一个状态点)。可以看出,在关心的频率区间[10,150]rad/s内,降阶模型的幅频响应与全阶模型基本相同,可以良好地反映全阶系统的幅频特性。

图4 Hankel奇异值柱状图Fig.4 Histogram of Hankel singular value
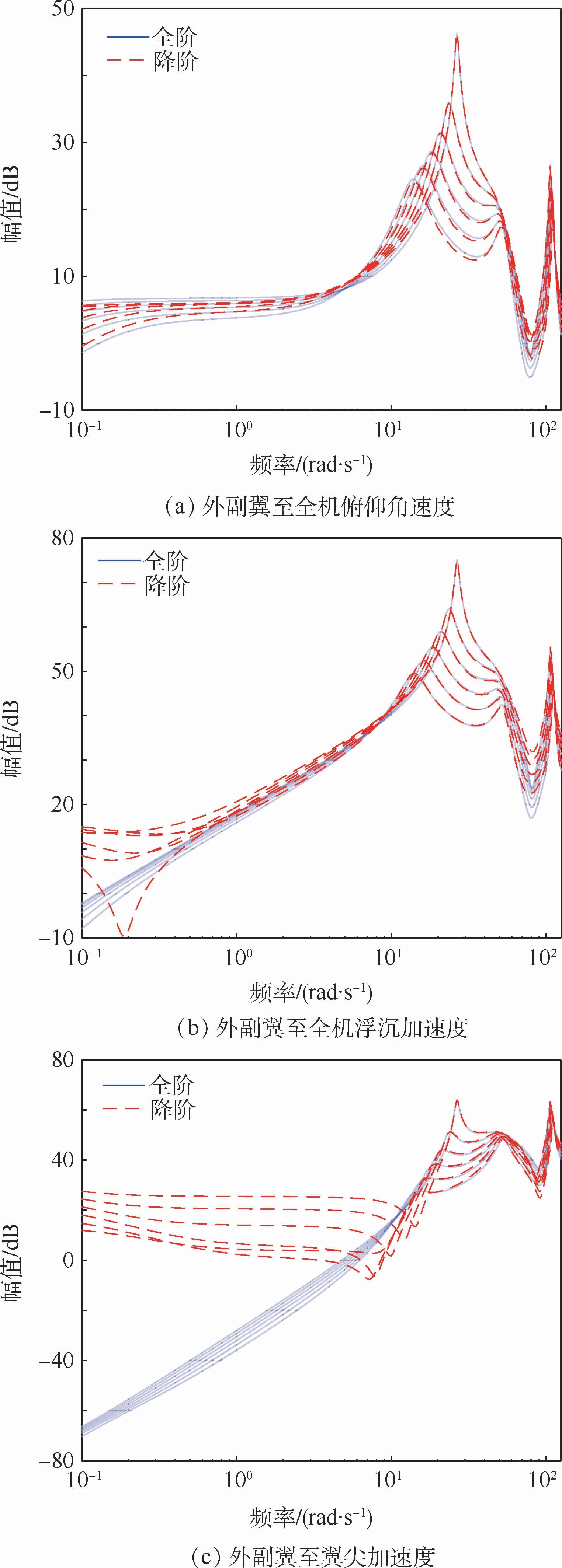
图5 全阶模型和降阶模型的幅频特性对比Fig.5 Comparison of amp litude-frequency characteristics between full-order and reduced-order model
针对单点LTI模型的幅频特性不具时变特征,需要对系统沿着参数轨迹开展时域仿真以反映LPV模型的时变本质。图6选取了具有一定变化速率的来流速度参数轨迹。图7对比了全阶与降阶模型阶跃响应。由图可以看出,降阶模型的响应趋势与全阶模型基本保持一致,系统的时变特性得以良好反映。总体来说,基于变参斜投影降阶算法得到的降阶模型能够准确地保留和描述全阶模型的时、频域特性,为后续阵风减缓控制器的设计与综合奠定了良好的基础。
3.2 LPV控制效果

图6 参数轨迹Fig.6 Parameter trajectory

图7 全阶模型和降阶模型的阶跃响应对比Fig.7 Comparison of step response between full-order and reduced-ordermodel
本节基于上述LPV降阶模型和考虑参数变化率的控制器综合方法设计LPV颤振抑制框图,如图8所示。其中:Wdist为扰动权重函数;eu和ep分别为加权输入和输出;d为扰动;n为噪声;ymeas为输出反馈;性能权重函数Wperf的作用为抑制外部扰动引起的输出响应,由于本文在模型降阶时已经突出了[10,150]rad/s频带的重要性,为使控制器尽量简单,可将性能函数取为各输出响应幅值最大值的倒数。

Wu为舵面控制信号的输出加权函数,为限制控制舵面的偏转角度并抑制模型中的高频振荡,输出加权函数使用高通滤波器。

Wnoise为量测噪声权重函数,可以提高控制器的抗噪能力,同时避免设计过程中可能出现的数值问题。为反映传感器1%的量测噪声,量测噪声权重函数选取为

图8 LPV颤振抑制控制框图Fig.8 LPV control program chart of flutter suppression

按照上述权重函数的选取,最终所得的阵风减缓LPV阵风减缓控制器的阶次为10阶。
3.2.1 单舵面效能分析
为了验证LPV阵风减缓控制器对飞翼无人机的阵风减缓控制效果,评估不同舵面对阵风减缓控制效果的影响,本节使用图9所示的Dryden阵风模型作为紊流干扰,LPV阵风减缓控制器的速度范围为V∈[18,24]m/s(见图10),对比控制前后系统的输出响应情况,并考虑2种不同单舵面的控制策略,分析2个舵面下的控制效果差异,计算出控制器性能为γ1=0.573 7。
从以上的开闭环系统响应对比可以看出,LPV阵风减缓控制器能够自适应地计算出合适的反馈增益,使全机的俯仰角速度和浮沉加速度得到有效减缓。
经图11中全机俯仰角速度与全机沉浮加速度参数的对比,明显发现处于纵向力臂较长位置WRF3舵面对阵风减缓的控制效果更好。

图9 Dryden阵风模型Fig.9 Dryden gustmodel

图10 调度参数轨迹Fig.10 Trajectory of scheduling parameter

图11 开环系统与闭环系统2种舵面输出响应对比Fig.11 Comparison of output response for two kinds of control surface between open-loop and closed-loop system
3.2.2 不同舵面组合效能分析
在飞行器的实际飞行过程中,为应对不同的来流情况,是需要不同舵面的搭配来处理,下面设计襟翼与外副翼舵面组合进行阵风减缓的控制器,与之前性能较好的单舵面外副翼进行阵风控制效果的比较。最终,所得的阵风减缓LPV阵风减缓控制器的阶次为11阶,控制器性能为γ2=0.344 3,γ2明显小于单舵面γ1。
为了定量地描述阵风减缓的效果,本文从最大幅值、振动能量和输入能量这3个角度来对阵风减缓效果进行评价。
1)最大幅值
定义阵风的幅值减缓率为

式中:Aopen为开环系统响应幅值的最大值;Aclose为闭环系统响应幅值的最大值。
在遭遇连续阵风后,由于2个舵面同时偏转,将产生更大的气动力来抵消飞机的过载。
由图12和表2分析可知,从遭遇连续紊流阵风后系统的闭环响应来看,2个舵面配合使用时,阵风减缓的效果明显优于单舵面进行控制时的效果。其中闭环系统中双舵面控制全机俯仰角速度幅值、全机浮沉加速度减缓率明显超过单舵面,而翼尖加速度的幅值减缓率的提升则不高。

图12 单舵面与双舵面控制输出响应对比Fig.12 Comparison of output responses between single control surface and double control surfaces control
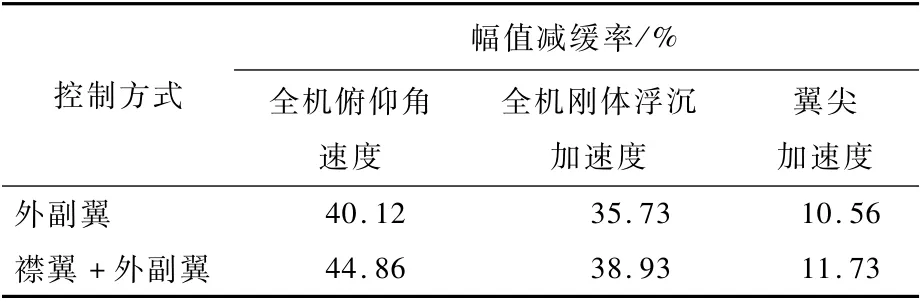
表2 2种控制方式的幅值减缓率对比Tab le 2 Com parison of am p litude reduction rate between two con trol strategies
2)振动能量
Parseval定理指出,振动信号计算的平均功率在时域与频域内相等。因此,阵风时域响应信号中的一样本函数x(t)的平均功率为

式中:T和f分别为周期和频率;Sxx为阵风响应信号x(t)的自功率谱密度,即单位频率上的平均功率。而Sxx曲线与频率轴之间的面积表示信号的平均功率。计算出控制前后输出信号的平均功率后,定义阵风的能量减缓率:其中:p0为开环输出信号的平均功率;p1为闭环输出信号的平均功率。

图13对比了全机俯仰角速度、全机浮沉加速度、翼尖加速度输出信号的功率谱。
表3中对比了2种舵面控制下的能量减缓率。由表3分析可知,与幅值减缓的分析类似,双舵面控制与单舵面控制相比各输出响应对应的减缓率均较高。
并且图13的功率谱可以看出,翼尖加速度atip中的低频信号并没有得到抑制,高频信号得到一定程度的减弱,对比降阶模型与全阶模型幅频响应,对于输入舵偏对翼尖加速度输出的系统频带,降阶模型与全阶模型在低频段吻合度较差,控制器设计时采用的是降阶模型,因此造成控制器对低频段响应无法做出准确控制,这导致了翼尖振动的抑制效果不佳。
3)输入能量
由之前的结果可以看出,双舵面较之单舵面控制的阵风幅值减缓率、能量减缓率更高。但由于实际飞行时需考虑消耗能量,因此对于阵风减缓问题,双舵面与单舵面控制策略的选择还需从输入能量这个方面考虑。

图13 单舵面与双舵面控制输出响应功率谱对比Fig.13 Comparison of power spertrum of output responses between single control surface and double control surfaces control

表3 2种控制形式的能量减缓率对比Table 3 Com parison of energy reduction rate between two con trol strategies
由图14(a)可知,与双舵面控制相比,单舵面控输入舵面偏角大。从输入功率谱对比(图14(b))中发现,单舵面控制所消耗的能量小于双舵面控制。在工程应用中,需要综合考虑舵面偏角与消耗能量的因素,选择合适的阵风减缓控制策略。

图14 单舵面与双舵面控制输入对比Fig.14 Comparison of input between single control surface and double control surfaces control
4 结 论
本文针对飞翼无人机阵风减缓问题,结合Lyapunov函数方法和变参斜投影降阶算法,构建同时考虑参数变化率限制和模型降阶条件的LPV阵风减缓控制器,并将该方法应用于Mini-MUTT飞翼无人机模型的阵风减缓研究中,得到:
1)所采用的变参斜投影降阶算法能够实现高阶模型的快速有效降阶,得到的降阶模型较好地保留了全阶模型的幅频特性和时变特性。
2)基于所提方法设计的LPV阵风减缓控制器是一个随调度参数时变的控制器,能够保证较宽速度范围内阵风得到有效减缓。
3)在单一舵面阵风减缓中,置于外侧的舵面控制效果优于内侧舵面;而在双舵面阵风减缓中,双舵面的控制效果优于单一舵面,但控制所需输入能量也会增加。在工程应用中需要针对具体问题,综合考虑控制效果和能量消耗以确定合适的控制策略。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
空军工程大学学报(2022年3期)2022-07-13
中国自行车(2022年3期)2022-06-30
军事文摘(2021年17期)2021-09-24
环球时报(2021-01-07)2021-01-07
孩子(2020年4期)2020-06-08
网络空间安全(2019年8期)2019-03-18
振动工程学报(2018年5期)2018-01-04
科技创新与应用(2017年18期)2017-06-27
