
基于CAN总线的车辆模式开关设计
2020-07-24 07:48胡娟,芦莎
黄山学院学报 2020年3期
胡 娟,芦 莎
(黄山学院 机电工程学院,安徽 黄山 245041)
1 引 言
随着消费者对汽车驾驶舒适度的要求越来越高,汽车内部供驾驶员操作的开关按键以及相关的电子模块越来越多,必然导致电子模块之间的连接线束越来越多,也越来越复杂。大量的连接线束提高了车辆设计的成本,更严重的是过多线束应用带来了巨大的安全隐患。为了缩减汽车线束的使用,近些年乘用车开始大量出现总线类开关[1]。诸如采用LIN 总线的玻璃升降开关、采用CAN 总线的空调面板开关以及汽车仪表。CAN 总线的车辆模式开关正是在这些应用的背景下提出将车辆模式的选择使用CAN总线的方式实现,提高了车辆模式选择的安全性,对车身开关集成化设计具有一定的参考意义。
2 CAN总线的特点
相对于其它的通信方式,CAN总线通信具有突出的实时性、稳定性和可移植性。其主要的特点可概括为:
1.CAN 总线的网络节点没有主从关系,通过判断优先级,采用总线仲裁技术来发送信息,不存在主节点的调度以及轮询,因此CAN网络系统的响应速率非常高[2]。
2.CAN 网络采用差分传输技术,有效的规避了供电系统网络以及电源网络带来的信号干扰,有效地提高了通信数据的可靠性以及电磁抗干扰能力。
3.CAN网络采用总线编码的形式涵盖节点实际的功能指令,理论上CAN网络节点的框架不受硬件电路的限制[3]。
4.CAN 网络的所有节点均包含通信错误检测、错误通知、错误恢复,而且CAN 网络长时间发生错误时,可以将发生错误的节点暂时从总线上剥离[4]。
3 基于CAN总线的车辆模式开关
3.1 车辆模式开关
随着国家对能源消耗的战略部署要求和消费者对车辆舒适度以及应用场合的要求,车辆的运行模式得到了长足的发展。现阶段针对车辆模式主要3 种:1.传统动力的燃油车;2.燃油和电动同时存在的混动动力车(HEV 模式);3.纯电动车(EV 模式)[5]。另外针对消费者对车辆舒适度以及应用场合的要求,车辆的驾驶模式又分为:1.Sport 模式(运动模式可更改发动机以及变速箱的运行模式,提供车辆更加强劲的动力);2.Snow 模式(雪地模式可更改制动系统的运行模式,更好地实现车辆的制动和防滑);3.ECO 模式(经济模式可更改发动机以及给油系统的运行模式,在拥堵的城市交通中可以达到省油的目的)[6]。
上述的车辆模式或者驾驶模式,并不是在汽车上同时存在的,具体车辆设计怎样的操作模式需要车辆制造商经过调研和权衡后进行选择。本文的设计提供一种模式选择开关,其包含2种车辆模式:EV 模式和 HEV 模式,3 种驾驶模式:Sport 模式、Snow 模式以及ECO 模式。车辆驾驶员可通过操作该开关,实现车辆模式以及驾驶模式的切换请求,开关的所有输出信号均采用CAN 总线通信的方式同车辆其它的控制器进行信息交互,如发送机控制单元、ECU模块、车辆动力系统ePT模块等。
3.2 车辆模式选择开关的电路框图
如图1 所示,车辆模式选择开关包含电源转换模块将车辆提供的12V 电源转换为5V 电源提供系统微控制器工作;模式选择按键采样部分,当驾驶员操作按键时将按键信号通过微控制器转换为串口信号并输出给CAN收发器;CAN收发器将微控制器输出的串口信号转换为符合CAN2.0 标准协议的CAN报文信号,提供车身其它控制器用于车辆模式选择的识别。

图1 车辆模式选择开关架构图
3.3 车辆模式选择开关的硬件设计
3.3.1 带自锁功能的电源转换模块
乘用车供电电压为12V 电源系统,车辆控制器或者模块为了满足内部MCU 工作均为5V 电源系统。因此车辆模式选择开关需要设计一个12V 转5V 的电源转换模块。由于车辆模式选择开关的供电电源连接到车辆蓄电池上,为了降低车辆模式选择开关的静态功耗,保证长期使用以后蓄电池不出现馈电的情况,本文设计一种带有自锁功能的电源转换电路,以达到静态功耗为零的目的。设计电路如图2。
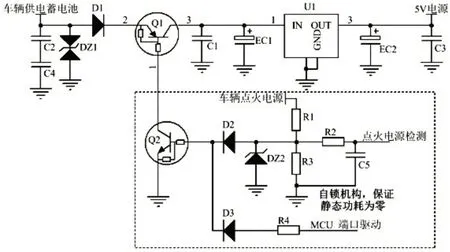
图2 带自锁功能的电源转换模块
电路中电容C2、C4以及TVS管DZ1为电源端口滤波以及抑制浪涌的元器件;二极管D1起到了防反接的作用;电容C1、EC1以及EC2、C3均为滤波电容和储能电容,U1 为12V 电压转换为5V 电压的单端稳压芯片。该电路的最大特点在于由三极管搭建的自锁机构,其能够保证车辆模式选择开关的静态功耗为零,具体的工作原理如下:
1.当车辆点火时,由R1、R3 分压后形成的电压通过二极管D2驱动三极管Q2,从而打开三极管Q1保证整个电源转换电路在点火瞬间即可开始工作;
2.当车辆点火以后,由R1、R3 分压后形成的电压通过电阻R2 提供给内部MCU 的检测端口,车辆模式选择开关内部MCU 判定此时车辆点火并在电阻R4的右侧提供5V的电源驱动,保证三极管Q2打开。当这个过程建立完毕,即使取消车辆点火电源的供给,整个电路仍然能够有效地工作;
3.当车辆熄火即点火电源消失,此时MCU的点火电源检测端口识别到车辆熄火,车辆模式选择开关内部MCU 在“MCU 端口驱动”的引脚进行计数,当计数时间达到了预设值即关闭驱动,整个电源转换电路停止工作,车辆模式选择开关的静态功耗为零;
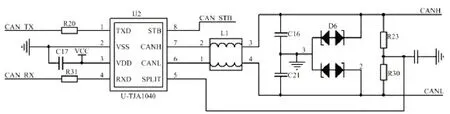
图3 CAN通信接口电路图
4.“MCU端口驱动”在点火电源消失以后设置计数的目的是为了进行CAN通信数据的保存,MCU软件设计的记忆储取。
3.3.2 CAN通信接口电路
TJA1040 是荷兰飞利浦公司制造的一款高速CAN收发器,是乘用车CAN网络同车身模块微控制器之间的主要连接器件。它能够提供高速的CAN通讯应用环境,在待机模式下具有非常低的静态功耗,而且能够对各种错误帧进行检测并回到正常的工作模式。
1.TJA1040 有两种工作模式可以通过引脚STB选择对这些操作模式有详细的描述,如表1。

表1 工作模式
正常模式:在该模式下CAN总线可正常通信。
待机模式:在这种模式下收发器处于低功耗状态,静态电流可以达到微安的级别。同时还具有总线唤醒检测的功能[7]。
2.唤醒
在待机模式中CAN收发器的SPTL引脚实现了对总线信号的监控,一旦检测到总线处于活动状态,收发器将进入正常模式[8]。
3.4 车辆模式选择开关的软件设计
车辆模式选择开关整个的软件框架进行分块设计,将各个功能函数的子模块进行封装。主要包括:CPMU_Initallzation、GPIO_Initallzation、Time_In itallzation、 ADC_Initallzation、 SCI_Initallzation、WDT_Initallzation。
关于功能应用如图4 所示,一共封装了5 个功能模块:按键扫描模块、CAN信号发送模块、电源管理模块、CAN信号接收模块、休眠唤醒模块。
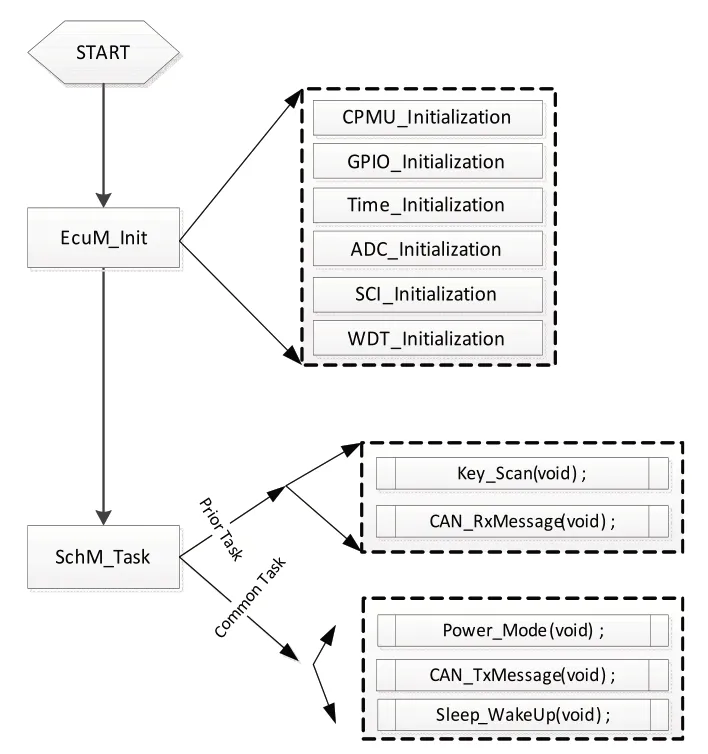
图4 车辆模式选择开关软件框架以及函数功能图
如图5,车辆模式选择开关采用分块的架构进行软件设计。完成整个硬件的初始化以后,首先对车辆的电源模式进行判定读取车辆当前状态。在明确车辆点火以后进行按键扫描,判断驾驶员当前需要请求切换的驾驶模式或者车辆模式。获得驾驶员的请求以后,将按键信号转换为CAN总线信号发布到车身网络,同其它车身控制器进行信息交互并请求其它车身控制器执行相应的功能状态。整个软件运行还包括休眠和唤醒的部分,当车辆熄火或者驾驶员长期没有操作任何按键,车辆模式选择开关将进入休眠模式,降低工作电流、减小电能的消耗。

图5 车辆模式选择开关软件流程图
4 结束语
采用本文提供的设计方法,将车辆模式选择开关的多个按键集成CAN信号的形式进行输出,与车身其它模块进行信息交互,有效地提高了模式选择类型开关的安全等级以及功能的拓展性。
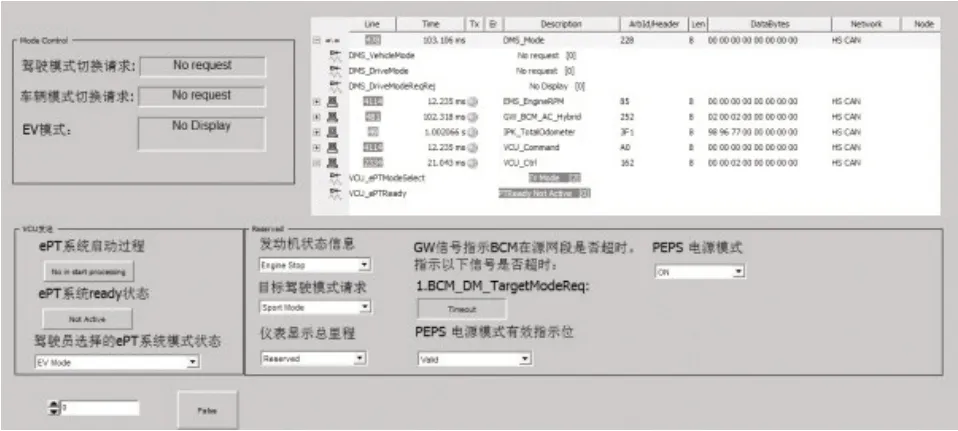
图6 Vehicle SPY总线通信设备测试界面
如图6所示,通过Vehicle SPY软件模拟车辆其它CAN节点信号,设计的车辆模式选择开关能够安全有效地进行车辆和驾驶模式的请求,同时也能够及时地响应车辆其它控制节点的命令。相对于车辆模式开关的CAN总线设计还涉及到诊断服务,例如节点丢失、总线关闭、电源电压过高、电源电压过低等需要进行进一步的研究和探讨。
猜你喜欢
电子制作(2021年3期)2021-06-16
电子制作(2019年13期)2020-01-14
阅读(快乐英语高年级)(2019年2期)2019-09-10
数码世界(2018年7期)2018-08-11
电子制作(2018年11期)2018-08-04
电子制作(2016年1期)2016-11-07
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
