
车用IPMSM调速系统控制关键技术
2020-07-24 10:17王旭斌
汽车电器 2020年7期
王旭斌
(河南交通职业技术学院汽车学院,河南 郑州 450000)
内置式永磁同步电机 (Interior Permanent Magnet Synchronous Motors,IPMSM)因转子磁路结构不对称,交/直轴电感不相等,能够产生磁阻转矩,具有高效率、高功率密度、低噪声、高转矩电流比、强鲁棒性等优点。低速时能输出恒定转矩,以适应快速起动等要求;高速能输出恒定功率,具有较宽调速范围,适应高速行驶等要求,在电动汽车领域得到了广泛应用。
以转速为控制目标的IPMSM双闭环矢量调速系统主要研究的是起动至设定转速值的动态转速跟踪性、稳定性、扩展性及在设定值下稳态运行时抗干扰性。对转速控制是基于电磁转矩的,由电磁转矩与定子电流关系可知IPMSM调速控制系统实质是对定子电流的控制。由运动方程知,在起动过程或干扰存在下的转速动态变化时,转速控制下的输出电磁转矩大于负载转矩,达到稳定设定转速值时,转矩/电流迅速稳定到要求值,输出转矩和输出功率趋于稳定。实现IPMSM调速的关键控制技术集中于调节器结构及参数、低速转矩控制和高速弱磁控制策略以及IPMSM电气参数变化对调速系统的影响。
1 运行特性
在一定的电机电压下,对电机的控制,归根是对IPMSM定子电流的控制,因此,电流工作区域及实时运行点是研究对其控制的根本。IPMSM实际运行时的定子电流被限制在允许的范围内 (考虑到电机发热和永磁体的去磁程度等原因),因此电机的转矩也会受到限制。受到逆变器输出能力及电机绝缘能力的限制,定子电压随目标 (参考)转速ω*的升高而增大,但最终会达到电压极限。由数学模型表达式,电压电流限制下IPMSM工作点在电流相平面中曲线如图1所示[1],对应外特性如图2所示。输出最大转矩能够达到的转速为转折转速ωr,也即基速。相对于基速的不同目标转速将IPMSM运行划分3个工作区域,电流限制区OA段 (低速,电机端电压小于SVPWM调制下的逆变器最大输出电压恒转矩运行)、电压电流共同限制区 (电机沿曲线OA和曲线BC之间的区域运行,弱磁区域I,恒功率运行)和电压限制区BC段 (深度弱磁区域II,最大功率运行)。另外,在研究电机效率控制时,根据电压极限椭圆与MTPA曲线关系,将工作区划分为恒转矩部分、部分弱磁区和完全弱磁区[2]。电机调速范围低速受机械摩擦等因素造成电机蠕动和爬行影响,最高转速ωmax由弱磁能力确定。
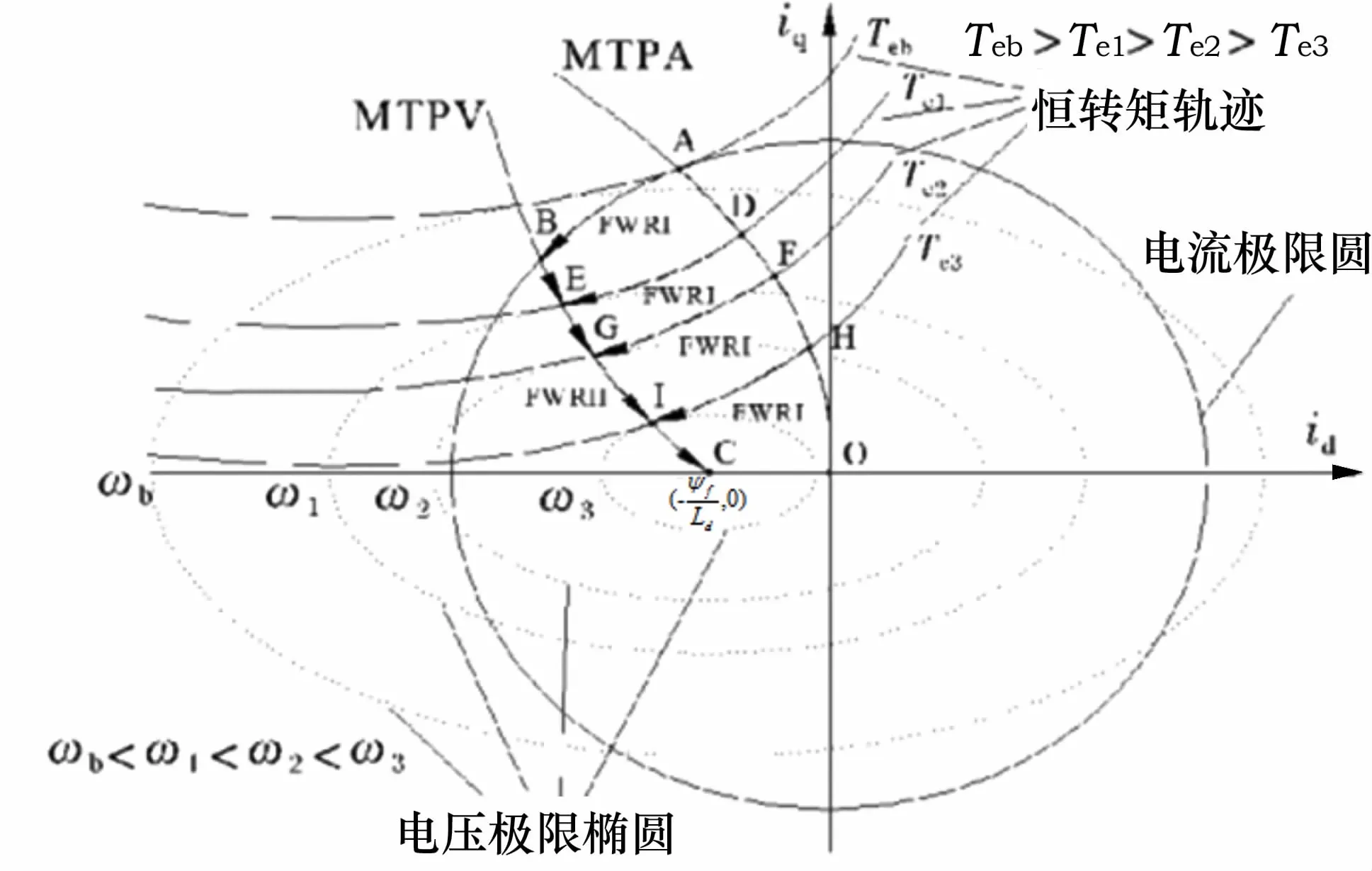
图1 电压电流限制下的d,q轴平面内的工作区
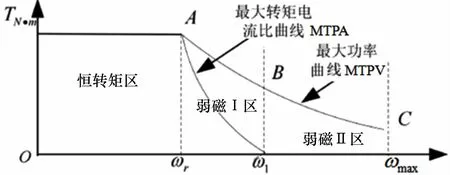
图2 外特性曲线
2 控制技术
IPMSM调速系统是通过双闭环反馈控制实现一定直流母线电压下,基于性能要求的控制策略计算所需的电磁转矩、电流及电压,再通过常用的电压空间矢量SVPWM(Space Vector Pulse Width Modulation)调制技术来完成的。基于矢量控制技术的控制框图如3所示,关键是获得不同转速工作区下的电流参考值i*d、i*q。
2.1 调节器
采用电流转速双闭环控制可使调速系统在起动瞬态过程中,始终保持电流和电磁转矩为允许最大值,调速系统以最大加速度运行。当到达稳态时,使电流立即降下来,电磁转矩与负载转矩相平衡,从而迅速转入稳态运动。调节器的结构及参数将会影响运行性能,内环电流调节器的作用是对电流快速跟踪,通常采用PI控制。转速调节器是实现良好调速性能的关键环节,对其研究较多,工程上采用PI控制较多。PI参数整定一般基于频域性能指标求解析值或工程简化计算出,如调速范围和负载变化范围较大,速度环的运行状况复杂,由比例积分PI工作过程及电机运动方程,往往很难找到一组PI转速调节器参数使系统在各种状况下都表现出理想的运行性能[3,4],这时宜采用分段或智能PI控制或直接智能控制 (滑膜控制、模糊控制、预测控制等)的非线性转速调节器。电流PI调节器输出电压限幅值与电机本身限制电压也即直流母线电压有关,转速调节器输出根据MTPA控制方法的需要有转矩、定子电流is或有功电流iq等,其值由电机本身限制转矩电流确定。PI调节器抗积分饱和采用条件积分法和反计算法结合的方法可缩短调速系统的稳定时间,减小系统的超调量[5]。需指出的是转速PI调节器参数整定更多是基于表贴式SPMSM id=0下进行的参数整定,对IPMSM很少有公开文献。对电流调节器,由IPMSM电压方程,采用前馈补偿方式对id、iq解耦,使d,q轴电流控制器可以分别实现线性化,实现系统完全解耦。
2.2 MTPA
为了最大限度利用IPMSM的磁阻转矩,减小电机损耗,在恒转矩区常采用最大转矩电流比 (MTPA)的控制策略,即利用最小的定子电流获得最大的电磁转矩输出。MTPA关键是得到电磁转矩与交直轴电流的关系,通过理论推导计算,交、直轴电流与电磁转矩之间存在着复杂的函数关系,要准确实现最大转矩电流比控制比较困难。对MTPA控制的研究主要从两个方向上进行:含电机参数的MTPA研究与去电机参数的MTPA研究[6]。对于含电机参数的MTPA研究,主要包括查表法、在线计算法 (解析法、转矩角β求解算法、反馈算法与直接求解算法)[7]、多项式拟合法及结合电机参数辨识的标幺化MTPA控制方法等。在去电机参数MTPA控制的研究方面,包括高频信号注入法、虚拟信号注入法、步长搜索法、智能控制算法等。

图3 IPMSM双闭环矢量控制调速系统框图
2.3 弱磁控制
受逆变器输出电压限制,当起动增速过程中转速达到基速时,需采用弱磁方法实现转速扩展。弱磁实际就是在保持电机端电压不变的前提下,合理分配直轴电流id和交轴电流iq分量。从直轴电流的补偿方式来看,弱磁控制策略 (FW)主要分为前馈型、反馈型与混合型。前馈型包括公式计算法、查表法等;反馈型包括基于id负向电流补偿、电流超前角β法、电压反馈法、梯度下降法、单电流调节器法等;混合型主要指结合前馈型与反馈型的综合控制方法。从控制思想来说这些弱磁算法分为基于电机模型控制和鲁棒控制两大类算法[8]。电机端电压和电流达到最大值,弱磁扩速能力受两个参数弱磁率Ldid/ψf和凸极率Lq/Ld的影响是较大的,同时增加弱磁率和凸极率可以明显提高弱磁扩速。但是,为防止直轴电流过大造成转子永磁体不可逆退磁,弱磁时需控制d轴电流的安全运行值[9]。
弱磁控制研究除了各弱磁区域下的控制策略外,还涉及区域间的平稳过渡和切换问题,主要有基于转速、电流及电压或智能控制技术等方式。弱磁控制是建立在低速控制电流下对定子电流的修正,受电流极限值的约束,需对电流修正值限幅。
2.4 电机参数辨识
从上面分析所述,作为被控对象的IPMSM,电机的自身参数决定影响着工作区的范围及划分、调节器参数的整定、低速及高速下MTPA-FW的控制算法实施,特别是在高性能控制下,转速和转矩工作范围宽,其定子电感、定子电阻和转子磁链等参数在长时间运行过程中会发生变化甚至衰减,需考虑磁路饱和的作用,定子绕组自感Ld、Lq参数随工作电流的变化和转子永磁磁链ψf随温度的变化,进而提出了电机的参数辨识方法。采用查表法、最小二乘法及改进、自适应控制、滑模变结构、卡尔曼滤波法、神经网络法和遗传算法等智能控制优化算法辨识估算电机实时参数[10-12]。
3 结论
在不同控制目标的调速过程中,调节器获得转矩电流期望值,不同转速区的电流控制策略完成交直轴电流计算分配,控制算法都有基于电机模型控制和鲁棒控制两大类,在高性能调速时,还要设计电机参数辨识估计算法实时修正调节器和控制策略。控制算法在满足调速性能外,还要考虑对系统硬件计算能力要求。基于最大输出转矩要求的控制,低速段多采用变频变压恒转矩控制,高速段采用恒压变频的恒功率或最大功率控制,常用的控制采用PI调节器、基速以下MTPA控制、弱磁I区电压闭环反馈和弱磁II区MTPV弱磁控制相结合,以达到损耗最少、转换效率最高的目的。
猜你喜欢
时代汽车(2022年19期)2022-10-18
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
科学家(2022年3期)2022-04-11
电机与控制学报(2018年9期)2018-05-14
教育(2017年38期)2017-09-03
魅力中国(2016年52期)2017-09-01
科技创新导报(2017年7期)2017-06-03
