低空小型无人机贝叶斯学习超分辨ISAR成像
2020-07-22 01:51刘明昊赵付成龙程凯飞
雷达科学与技术 2020年3期
刘明昊, 徐 久, 赵付成龙, 程凯飞, 杨 磊
(中国民航大学电子信息与自动化学院, 天津 300300)
0 引言
低空小型无人机(Unmanned Aerial Vehicle,UAV)的商用普及化以及相关的监管盲区,使得机场附近“黑飞”事件的发生呈上升态势,给公共安全带来隐患。无监管的无人机容易和民航飞机相撞引起飞行事故,造成严重的次生危害。故治理“黑飞”已成为民航业发展的一个不容回避的话题[1]。需要运用一系列高科技手段,对“黑飞”无人机进行监视和管控[2]。
与红外和光学探测[3]相比,雷达探测具有全天候、全天时的工作能力。传统的低空防御雷达[4]无法对低空小型无人机进行高精度成像,其原因是小型无人机目标雷达散射截面积(Radar Cross-Section,RCS)小,回波信噪比低,数据误差大。故可以采用逆合成孔径雷达(Inverse Synthetic Aperture Radar,ISAR)成像技术[5-9]。ISAR可以利用相干积累的方法获取非合作目标的高分辨率图像,能够获得目标形状的细节特征,同时其成像原理和传统雷达相比有着更强的抗干扰能力。
由于微/小型无人机目标RCS小,造成回波信噪比较低,其ISAR成像结果通常具有较宽的主瓣和较高的旁瓣,不利于分辨和识别。传统的ISAR距离多普勒算法(Range-Doppler, RD)必须满足奈奎斯特采样定理,若要求实现高分辨图像,则需要较长的相干积累时间,使得非匀速转动下积累的平动误差增大。目前针对该问题的超分辨ISAR成像方法如ESPRIT[10]使数据大大增多,处理速度缓慢,且超分辨能力有限。故需要选择有限CPI下的超分辨成像方法对无人机目标进行成像。
由于无人机相对空域背景具有固有稀疏特征,故可以选择利用压缩感知(Compressed Sensing, CS)[11]的方法,CS突破传统的奈奎斯特采样定理,可利用少量的观测值通过重构算法准确地获取信号,可通过低维观测恢复高维信号稀疏特征。针对低空无人机的高维信号,ISAR超分辨CS成像方法例如贪婪算法[12]、凸优化算法[13]等的误差敏感度尤其是乘性误差敏感度较高,稀疏成像恢复精度有限。
针对上述问题,本文提出了一种基于贝叶斯统计学习[14]的低空小型无人机超分辨ISAR成像方法。贝叶斯统计学习灵活性高, 适用范围广;相比于传统的CS重构算法,贝叶斯统计学习在恢复精度上有一定的优越性。该方法通过对ISAR成像目标建立Laplace先验概率分布,针对目标的Laplace先验分布与观测数据的高斯分布不共轭的问题,建立层级贝叶斯模型,可实现对目标ISAR图像后验概率密度函数的求解,从而有效利用统计学习理论优势,增强目标超分辨成像的精度和稳健性。最终实现目标的超分辨压缩感知ISAR成像,仿真实验结果证明可以解决对低空小型无人机监测的问题。
1 ISAR成像信号模型
无人机ISAR成像几何模型如图1所示,平面目标为雷达照射区域内的一个三维目标在雷达视线距离向和方位向二维平面上的投影。经过平动补偿后,目标转动等效为X-O-Y平面关于参考点O的角速度为ω的几何模型。
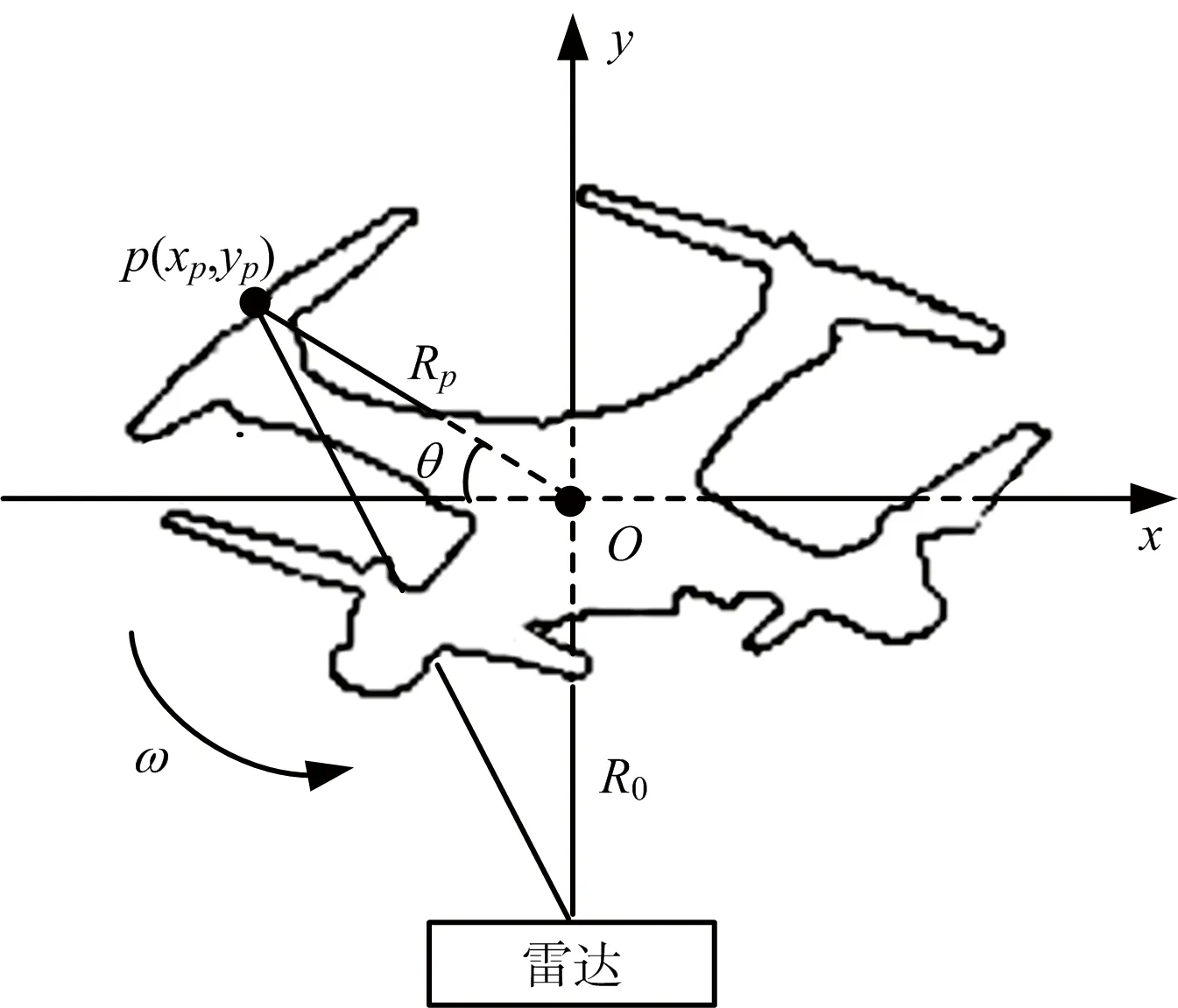
图1 ISAR成像原理示意图
设O点为无人机旋转中心,雷达与旋转中心距离为R0,无人机目标上任一点p与参考点距离为Rp。目标上某一点p到雷达的距离R表示为
(1)
当R0远大于Rp,式(1)可菲涅尔近似为
R(t)≈R0+ypcos(ωt)+xpsin(ωt)
(2)
当观测时间内转角ωt较小时
R(t)≈R0+yp+xpωt
(3)
此时,散射点p的回波信号可表示成

(4)
(5)
再对方位慢时间变量t进行逆傅里叶变换,可得

sinc[y-(R0+yp)]
(6)

(7)
式中,λ为雷达波长。当ωt较小时
(8)
由式(6),目标图像可表示为
(9)
由式(5)、式(6)、式(9),多个散射的回波信号用矩阵表示为
Y=AX
(10)
式中,A表示方位傅里叶字典,可由下式构造:

(11)
2 稀疏贝叶斯模型
2.1 压缩感知
由传统的采样定理可知,要从采样信号对原始信号不失真的恢复,必须满足奈奎斯特采样定理。CS是将信号的压缩和编码合并在一起,利用非线性相关测量采样率远小于奈奎斯特采样率。当信号具有稀疏性或可压缩性时,可用少量的观测值通过重构算法准确地获取信号。CS将信号的获取和压缩过程一起实现,解决了大量数据存储传输困难的问题。
针对低空小型无人机ISAR回波固有的稀疏性,CS可以很好地通过非线性重建算法重建信号。CS当中主要应用的贪婪算法、凸优化算法,贪婪算法需要的测量数据较多、重构精准度较低、求解速度方面有一定的局限性;凸优化算法存在一定的误差敏感性、稀疏成像恢复精度有限、收敛速度较慢。故本文采用基于CS理论的贝叶斯统计学习成像技术来进行低空小型无人机的超分辨成像。
2.2 贝叶斯模型
在平动补偿后还有残留的平动误差,进一步考虑相位误差和噪声因素,由式(10)假设观测模型为
Y=EAX+N
(12)
式中:Y∈CM×N表示观测数据;E为对角矩阵,表示相位误差;X为目标图像;N为噪声模型,其均值为0,方差为σ2。
高斯观测噪声情况下,回波数据似然函数模型为

(13)
式中,β=[β1,…,βM],βm表示第m个距离单元的加性误差精度参数,对应高斯模型方差的倒数。
为了实现对运动目标图像X的后验概率密度函数估计,需要对X施以合适的先验假设。低空小型无人机的响应相对于背景存在固有的稀疏性先验知识,对目标图像X引入稀疏先验分布。通常情况下,稀疏先验分布均属于重尾分布,如Laplace分布、学生t(Student-t)分布等,本文将采用Laplace分布作为稀疏先验概率分布。由贝叶斯推论,即
(14)
考虑到Laplace先验分布p(X)与式(13)相应的观测数据高斯概率分布p(Y|X)非共轭,将导致无法直接应用贝叶斯推论求解X的后验概率密度函数闭合解。进一步针对Laplace分布建立层级贝叶斯模型,通过引入中间超变量(Hyper-parameters)分层建立贝叶斯模型。将p(X)进行分层处理为
p(X)=p(X|α)p(α|λ)p(λ)
(15)
式中,p(α|λ)和p(λ)服从Gamma分布。
层级贝叶斯模型中,第一层首先对动目标ISAR图像建立多变量联合高斯分布:
(16)
式中,Λm=diag(α:m),可以看作是超参数矩阵α中第m列构成的对角矩阵,表示式(16)所示高斯分布的协方差矩阵。
第二层引入关于α的条件概率分布,即服从参数为η和λ的Gamma分布
(17)

为了减少超参数的数目,第三层引入针对超参数λ和β的Gamma分布
(18)
式中,a,b,c,d可设置为常数参数,根据经验值取10-6。
式(12)~式(18)表征的贝叶斯概率模型如图2所示。
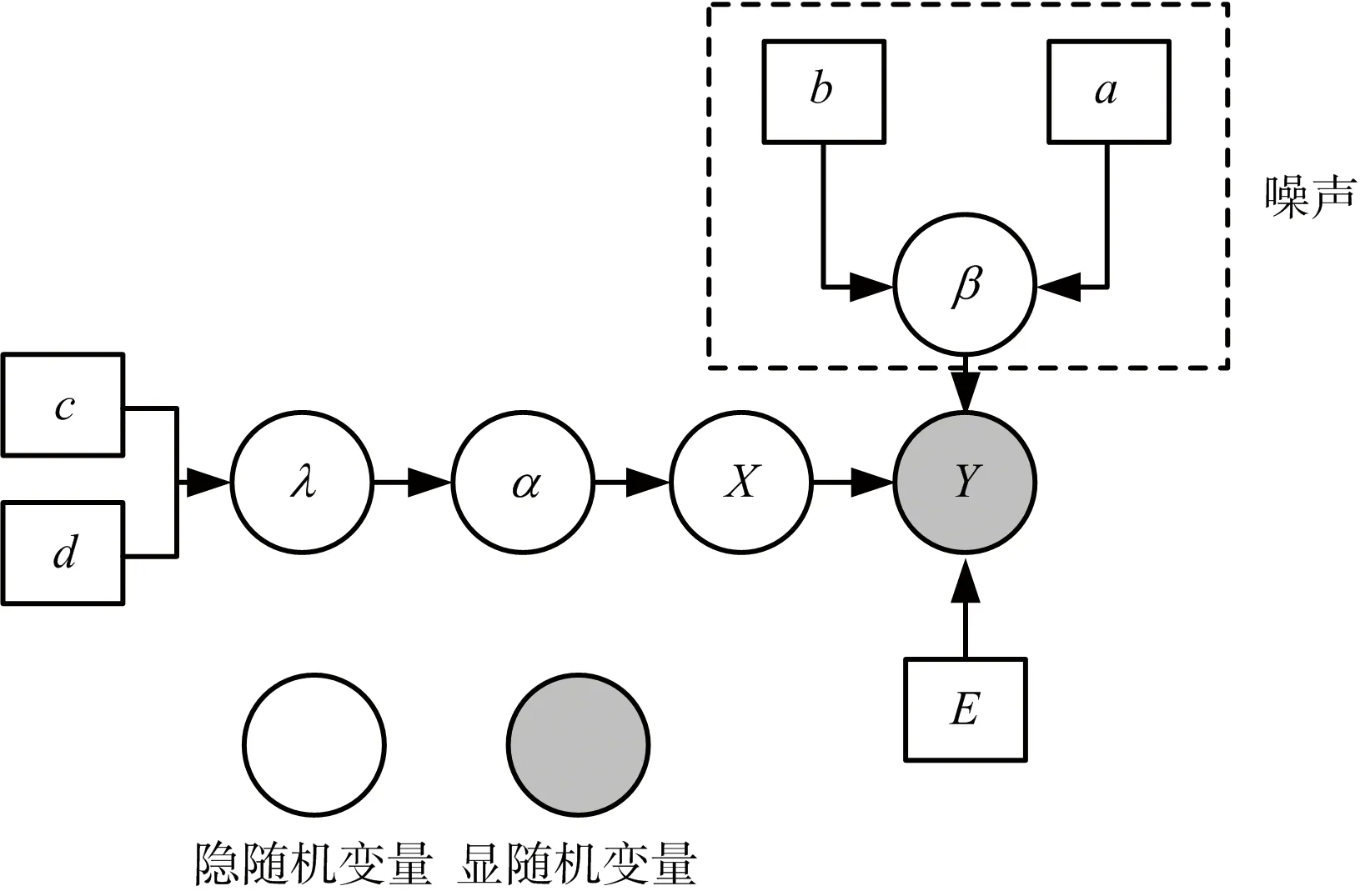
图2 贝叶斯概率模型
2.3 小型无人机ISAR贝叶斯机器学习成像算法
根据2.2节给出的层级贝叶斯建模结果,直接应用贝叶斯推论计算ISAR图像X和超参数α,λ,β的联合后验概率密度函数,如
p(X,α,λ,β|Y)=
(19)
令Θ={X,α,λ,β},根据变分贝叶斯原理,采用如下因式分解进行近似:
q(Θ)≈q(X)q(α)q(λ)q(β)
(20)
可结合期望最大算法在求解期望的步骤分别计算相应变量的后验概率密度函数,然后在期望最大化的过程中计算相应的参数。针对SAR-GMTIm应用[16],在计算期望的步骤,可根据
(21)

根据式(21)可得动目标ISAR图像X的后验概率密度函数估计为

(22)
将式(13)、式(16)代入式(22)可得
(23)
其中
(24)
由式(23)~式(24)可见,动目标ISAR图像X的后验概率密度函数估计服从复高斯分布,对应的期望μ可用来表示X的均值,对应的方差Σm可用来表示第m个距离单元的协方差矩阵。
根据式(21)可得超参数α的后验概率密度函数估计为
(25)
将式(16)、式(17)代入式(25)可得每个元素αnm的第l阶矩为
(26)

根据式(21)可得超参数λ的后验概率密度函数估计为
(27)
将式(17)、式(18)代入式(27)可得每个元素λm的平均值为
(28)
由式(28)可知,超参数λ的后验概率密度函数估计服从Gamma分布。
根据式(21)可得超参数β的后验概率密度函数估计为
(29)
将式(13)、式(16)~式(18)代入式(29)可得超参数β的每个元素βm的平均值为
(30)
式中,|·|F代表矩阵的F范数,Tr(·)代表求矩阵的迹。
由式(30)可知,超参数β的后验概率密度函数估计服从Gamma分布。从而通过式(23)、式(25)、式(27)和式(29)的迭代更新,获得了运动目标的ISAR图像。因为Θ中的随机变量都相互依赖,迭代过程大大降低了误差传播的干扰,提高了成像的精度。又因为对β进行了推断,从而又进一步抑制了残差杂波和提高了去噪能力。

(31)
(32)

可知{X,α,λ,β}的取值相互依赖,利用期望最大化算法对超参数进行估计,进而求出后验概率的均值以及方差,对噪声方差进行估计获得超参数的初始值,判断期望向量是否符合终止迭代条件,若符合则停止迭代,直到满足收敛条件,获得了运动目标的ISAR图像。应用变分贝叶斯期望最大算法,可解析求解无人机目标后验概率密度函数,并同时校正目标非系统性平动误差造成的成像散焦问题。贝叶斯压缩感知算法恢复的信号符合稀疏性,且不需要重构误差正则化参数,减少重构参数对结果的影响,可校正目标非系统性平动误差造成的成像散焦问题。
3 实验仿真及分析
本节给出仿真数据处理结果以验证所提方法的有效性。在仿真中,如图3(a)所示,目标为微小型四旋翼,其标准尺寸为0.78 m×0.78 m×0.24 m。仿真采用标准雷达参数,引入等信噪比雷达模型,雷达的中心频率为9.6 GHz,发射信号的总带宽为5 GHz,所以方位向分辨率每单元为0.03 m。脉冲重复频率为500 Hz,相干积累时间为1.02 s,目标的转动速度为28.10 °/s,总旋转角为28.657°,所以距离分辨率每单元为0.03 m。图3(b)为它的俯视投影图,其投影的方向与雷达观测的方向一致。
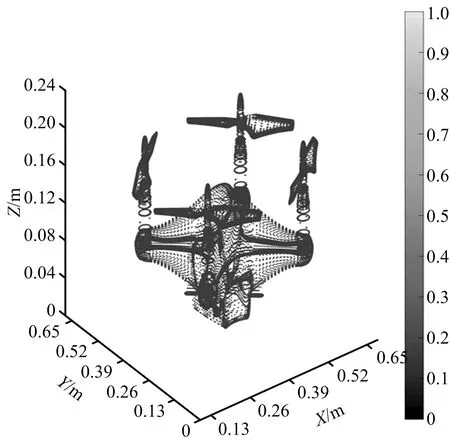
(a) 四旋翼三维物理模型
图4(a)给出了采用传统多普勒算法得出的成像结果,可以看出ISAR可以利用相干积累的方法获取非合作目标的高分辨率图像,能够获得目标形状的细节特征。
图4(c)、(e)、(g)给出了当降采样率分别达到1/2,1/4和1/8时,采用多普勒算法得出的成像结果。由图4(a)、(c)、(e)和(g)之间的对比可以看出,随着降采样的程度不断加深,对于多普勒算法得出的成像结果,成像结果的旁瓣越来越高,成像效果越来越差。
为了验证贝叶斯算法可以有效校正目标非系统性平动误差造成的成像散焦问题,图4(b)给出了对图4(a)的成像结果进一步进行贝叶斯算法优化的成像结果。通过图4(a)与(b)的对比可以看出,相较于处理之前的成像结果,该算法实现更好的信号恢复效果。
为了验证该算法可以有效地抑制旁瓣的影响,实现超分辨处理,增强目标超分辨成像的精度和稳健性。图4(d)、(f)、(h)给出了当降采样率分别达到1/2,1/4和1/8时,经过贝叶斯算法优化之后得出的成像结果。由图4(c)与(d)、(e)与(f)、(g)与(h)的对比可以看出,随着降采样的程度不断加深,即使降采样率高达1/8,采用贝叶斯算法优化处理后的图像依旧清晰。
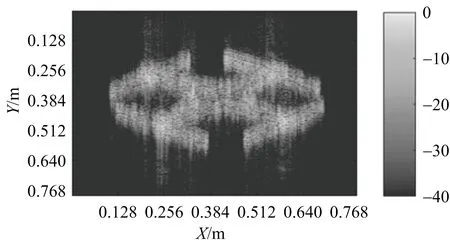
(a) 未降采样时ISAR成像
4 结束语
本文提出了一种基于贝叶斯统计学习的超分辨无人机ISAR成像方法,并给出了相应的成像处理方法。该方法通过分层建立复数Laplace先验分布的贝叶斯模型,应用变分贝叶斯期望最大算法求解无人机目标ISAR后验概率密度函数,最后基于后验概率密度函数计算目标ISAR目标成像结果及其置信区间。有效解决了无人机目标RCS较小导致的目标成像信噪比偏低问题以及相干积累时间较短导致的成像分辨率较低问题。对仿真的低空小型无人机数据的处理验证了本文所提方法的有效性。
猜你喜欢
今日农业(2021年17期)2021-11-26
考试与评价·高一版(2020年6期)2020-11-02
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
数学学习与研究(2017年10期)2017-06-22
读者·校园版(2016年14期)2016-07-07
中学生数理化·七年级数学人教版(2016年6期)2016-05-14