
基于兰姆波技术的倾斜凸透镜基板上水滴运动研究*
2020-07-22 07:24丁文政梁威朱鹏飞田昱鑫
汽车技术 2020年7期
丁文政 梁威 朱鹏飞 田昱鑫
(上海工程技术大学,上海 201620)
主题词:兰姆波 声流力 水滴运动 摄像头 单向换能器
1 前言
随着无人驾驶技术的快速发展,车用摄像头得到了广泛的应用,但在阴雨天气条件下,溅到镜头上的水滴会影响数据的捕捉,不利于汽车行驶安全。声表面波(Surface Acoustic Wave,SAW)是一种在固体浅表面传播的弹性波[1]。近些年来,由于声表面波良好的技术特性,其在微流体运动领域得到了较好的发展和利用。例如:Schmitt 等[2-3]探究了在各种非压电基板(玻璃、钢和铝)上检测和推进微升级液滴的机制;Wixforth[4-5]、Friend 和Yeo 等[6]人研究了液滴的驱动效应;Korshak 团队[7]和Frommelt 团队[8]探究了声流传递的动量、声辐射压力、表面张力以及振动和粘合力等因素对液滴变形的影响,验证了由声面波驱动液滴的机制;Brunet等[9-11]观察到声表面波激发的液滴能在带有纹路的基板上运动,并实现了在倾斜表面上抵抗重力的上坡移动,这一现象在John[12]、Benilov[13-15]、Savva[16]等人的理论和数值研究中得到了验证。
叉指式换能器(Inter Digital Transducer,IDT)和单相换能器(Single Phase Transducer,SPT)得到应用后,兰姆波受到了学者的极大关注,其可以通过将换能器附着在基板上产生,以推进液滴[2,17-19]。Gao 等[20]利用叉指换能器激发出兰姆波,研究了推进液滴的平均速度与输入功率之间的关系。Schmitt 等[17]通过兰姆波的模式转换(兰姆波在固-液边界处转换为压缩声波模式,从而在水滴内形成声流力)检测并去除了非压电基板上不同材料的液滴。Liang 和Linder[21]确定了可实现液滴推进的兰姆波振幅的临界值。Zhu等[22]探究了由兰姆波激发的液滴在倾斜玻璃基板上运动的机制。
以上学者对平面基板上液滴的运动状态进行了细致研究,但在生活中,曲面上的液滴运动现象也十分普遍。因此,基于兰姆波在微流体领域的良好特性,本文拟开发一种能够驱动曲面上水滴运动的兰姆波装置,并对水滴运动速度特性进行分析。
2 理论分析
基于不可压缩流体动量守恒原理,液滴在运动过程中满足二维时间依赖的纳维-斯托克斯(Navier-Stokes)方程[23-25]:

式中,ρ为液滴的密度;u为声流的速度;p为压力;I为单位对角矩阵;μ为液滴的粘度;Fs为声流力;FG为液滴重力;t为时间;∇为梯度算子。
水滴在倾斜凸透镜基板上运动时,主要受到声流力Fs、水滴和基板之间的阻力Fr以及重力mg的作用,如图1所示,其中,x轴为兰姆波的传播方向,x、y、z满足左手定则。本文主要探究以上3 个力对水滴在凸透镜基板上运动特性的影响。

图1 倾斜单面凸透镜基板上水滴运动受力示意
基于Nyborg 的声流理论[26],Shiokawa[27]推导出声流力公式:

式中,FSx、FSz分别为声流力在x轴和z轴方向上的分力;lx、lz分别为液滴在x轴、z轴方向上的位移;α1=-jα;α为衰减常数,且满足α2=1-(vs/vf)2;vs为泄漏的兰姆波速度;vf为液体中的声速;A为兰姆波在液滴边缘处的位移幅度;ω为角频率;kimag为兰姆波在液体介质内的能量损耗。
式(3)和式(4)适用于平面波场中液滴运动的数值模拟,但本研究中的波场是由单相换能器产生的球面波场,基于此,Liang 和Linder[21]对以上二维场方程进行了修正并适用于球面波场,从而可以获得适用于本试验的声流力场:

式中,ly为液滴在y轴方向上的位移;θ为声流力方向与兰姆波传播方向的夹角,如图2所示。

图2 兰姆波传播方向示意
声流力Fs可以根据公式推导而得:

由此可以看出,作用于水滴的单位声流力Fs与兰姆波波幅A的平方成正比,而A由施加到激发该兰姆波的压电陶瓷的电压峰值Vpp决定。因此,当其他条件不变时,增大Vpp,Fs会随之增大,从而加快液滴运动。
液滴在基板上会发生接触角滞后(Contact Angle Hysteresis,CAH)现象,由其产生的阻力Fr满足[28]:

式中,k为通过试验确定的无量纲常数;γ为液-气界面张力;R为液滴的半径;θr和θa分别为液滴的前进接触角和后退接触角。
结合式(5)~式(7),推导出水滴的受力理论方程为:


式中,ax、az分别为水滴在x、z轴方向上的加速度;为水滴重力方向与曲面切线方向之间的夹角;φ为基板倾角。
由此可知,随着基板倾角φ的增加,重力沿曲面切线方向的分力mgcosβ随之递增,由于阻力Fr增大幅度较小(倾角和位移改变时,液滴的直径变化仅为几毫米),由式(9)可知,驱动水滴运动的合力(声流力Fs与重力分力mgcosβ之和)就会增大,从而加速了水滴的运动。
对式(8),当选定液体和基板材料时,θr和θa只与液滴体积有关。随着体积的增加,cosθr-cosθa的值递减,张力γ和液滴半径R递增,接触角滞后减弱,阻力Fr减小[29]。张力γ与液滴表面积有关,表面积越大,张力越大。根据表面积和质量与体积的关系可知,当半径增加1 个数量级时,其张力增大速度较其质量增大速度慢。另外,水滴的下滑力随体积增大而增大,结合式(9)可以看出,水滴所受合力与水滴体积并不具有函数关系。因此体积对水滴运动的影响没有明确的规律。
由以上分析可知,声流力Fs、阻力Fr、重力分力mgcosβ主要与输入激发电压峰值Vpp、水滴体积以及基板倾角φ相关。因此,本文分别详细探讨电压、水滴体积、基板倾角对水滴在凸透镜基板上运动特性的影响。
3 试验方法
兰姆波装置包括单面凸透镜(直径Ф=50 mm,中心厚Tc=4 mm,边缘厚Te=2 mm,曲面半径ξ=157.25 mm)、直流稳压电源、函数信号发生器、放大电路单元、2个不同规格的微量移液器(0~10 μL、10~100 μL)、示波器、角虎钳、压电陶瓷、Keyence VW-9000 高速摄像机和DSA25液滴接触角测量仪。
将0.6 mm 厚的压电陶瓷(6 mm×4 mm)用环氧树脂胶粘附在单面凸透镜基板上,如图3 所示。直流稳压电源能够提供0∼30 V 的电压,函数信号发生器产生1 MHz 频率的连续方形电信号施加到单相换能器两端,以此激发产生试验所需的兰姆波。另外,示波器图像区域可以检测并显示激发电压峰值Vpp。高速摄像机记录液滴运动的全过程,液滴接触角测量仪精确测量水滴的接触角,以此来准确分析水滴运动的数据。利用角虎钳可以获得基板不同的倾斜角度,微量移液管用来测量微升级的水滴体积,并通过容器回收从基板流出的水。

图3 附有单相换能器的试验基板
分别将函数信号发生器、直流稳压电源、实验室自制放大器电路单元、示波器以及压电陶瓷用导线连接,兰姆波在单面凸透镜基板上由压电陶瓷激发,从而驱动水滴运动。凸透镜基板表面均匀地覆盖一层薄疏水层,以使水滴在基板水平时的接触角不小于90°。首先将凸透镜基板设置为试验所需的倾斜角度,高速摄像机固定在基板的上方,以便获取水滴的运动视频。设置好激发电压峰值,用移液管量取一定体积的水滴,将水滴滴在基板上的同时,打开高速摄像机记录试验全过程。
4 结果与讨论
根据自然界雨滴的体积数据,设置水滴体积分别为5 μL、10 μL、15 μL、20 μL、25 μL、30 μL。由于摄像镜头在不同的场景,倾斜角度各异,故将基板倾角分别控制为5°、10°、15°、20°,设置输入激发电压峰值Vpp从60 V增至150 V,电压峰值每增加15 V开展一组试验。为减小液滴在运动过程中外界(蒸发、污染等)对试验结果的影响以及保证试验数据的严谨性,每次试验重新放置液滴,且在同一起点运动。高速摄像机捕捉的其中一次水滴运动多帧合成图像如图4所示,展示了由兰姆波驱动的水滴部分运动过程。

图4 水滴的部分运动过程
实验室环境温度控制为20 ℃,此时水的动力粘度为1.002 mPa·s。在同一条件下,每组试验重复10 次以上,取其平均值进行比较。
4.1 倾斜角度对水滴运动速度的影响
体积为10 μL的水滴在不同倾角的基板上,分别输入激发电压峰值为120 V、150 V时,不同时刻的速度变化关系如图5所示。

图5 体积为10 μL的水滴在不同基板倾角下的运动速度
由图5可以看出,倾斜角度与水滴的运动速度正相关。倾角越大,水滴两边缘处的运动速度越快。当输入电压峰值为120 V时,水滴前进边缘和后退边缘的运动速度随基板倾角增加而增大,如图5a 和图5b 所示。当输入电压峰值为150 V时,得到了同样的水滴运动速度特征,如图5c 和图5d 所示。故当输入电压峰值与水滴体积恒定时,基板倾角越大,水滴运动越快,这与理论分析的结果一致。
4.2 输入电压对水滴运动速度的影响
分别将输入的激发电压峰值调整为60 V、75 V、90 V、105 V、120 V、135 V 和150 V,基板倾角设置为5°时,10 μL 和15 μL 水滴不同时刻前进、后退边缘处的速度关系如图6所示。
从图6中可以看出,水滴的运动速度与输入电压峰值近似为线性关系。随着输入电压峰值的增大,水滴两边缘处的速度也在增加。
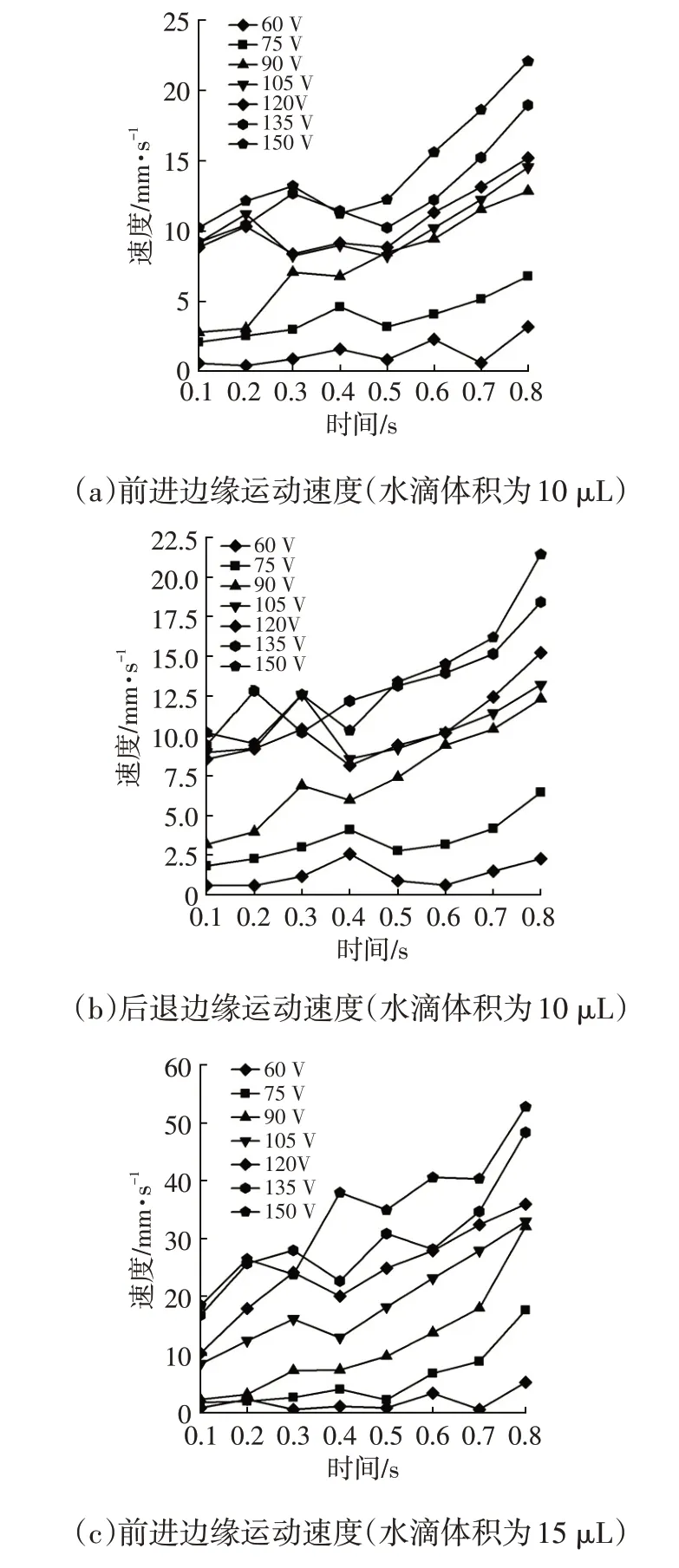

图6 φ=5°时水滴在不同输入电压峰值下的运动速度
从图6a 中可以看出,水滴体积为10 μL 时,随着输入电压峰值增大,水滴前进边缘处的速度逐渐上升,同时,由图6b 可知,水滴后退边缘处的速度也在不同程度增加。当水滴体积调整为15 μL 时,图6c、图6d 显示得到的水滴速度变化趋势和图6a、图6b 基本相同。
以上试验现象与理论分析相符,当基板倾角和水滴体积固定时,输入电压峰值越大,水滴运动越快。
4.3 水滴体积对水滴运动速度的影响
分别将水滴体积设为5 μL、10 μL、15 μL、20 μL、25 μL、30 μL,输入激发电压峰值为120 V 时,水滴在倾角为5°和10°基板上的运动速度关系如图7 所示。由图7 可见,水滴的体积和水滴两边缘处的运动速度没有明显的函数关系。


图7 激发电压峰值为120 V时不同体积水滴的运动速度
当倾角为5°时,15 μL 水滴前进边缘处的速度最高,几乎是25 μL 水滴前进边缘处速度的2 倍,当倾角为10°时,30 μL 水滴前进边缘处的速度却是最高的,如图7a 和图7c 所示。水滴后退边缘处的速度具有相同变化趋势,如图7b 和如图7d 所示。由此可以看出,试验现象和理论分析得到了相同的结论,即水滴体积与水滴运动速度之间不具有明显的函数关系。
5 结束语
本文基于兰姆波在倾斜凸透镜基板上开展了驱动水滴运动规律的探究。结果表明:提高输入电压,增大基板倾角,水滴的运动速度均会随之增加;但在不同基板倾角情况下,驱动水滴的效果各有异同。
在实际问题中,水滴体积是不可控的,但本文可为探测计算做数据积累的基础,为车用摄像头除雨提供理论基础和技术支持。更进一步,后续有望实现液滴体积的探测,在基板倾角固定时,可以输入合适的电压推动液滴到目标位置。
猜你喜欢
航空发动机(2022年3期)2022-10-13
科学技术与工程(2022年23期)2022-09-30
机械科学与技术(2022年6期)2022-06-27
应用数学和力学(2022年1期)2022-02-18
江苏大学学报(自然科学版)(2022年1期)2022-01-17
阅读与作文(小学高年级版)(2021年8期)2021-09-12
中国电子报(2020年68期)2020-10-20
东方少年·阅读与作文(2020年4期)2020-06-08
科学导报(2019年55期)2019-09-28
科教新报(2019年11期)2019-09-10
