苏州园林步行空间设计研究
2020-07-17 08:43宫一路黄磊昌毕善华
绿色科技 2020年9期
宫一路,黄磊昌,毕善华
(大连工业大学 艺术设计学院,辽宁 大连 116034)
1 引言
苏州为江南私家园林的代表,有“江南园林甲天下,苏州园林甲江南”之说,是古代造园最后的高潮[1]。苏州古典园林,是世界园林中熠熠生辉的明珠,也是我国艺术百花园中独放异彩的奇葩,在世界造园艺术发展史上占有极其重要的地位[2]。自1984年起,关于苏州古典园林的学术研究呈螺旋式增长态势,多次掀起研究热潮。研究对象从整体结构到细部研究、从个案研究到对比研究,研究内容从设计理念到造园要素、从造园手法到造景材料,研究方法从定性研究到定量研究、从理论认知到实践应用,逐渐形成了苏州古典园林研究的科学体系和研究范式[3~12]。
苏州古典园林拥有完整的步行系统和宜人的步行空间,园林中的山、水、植物、建筑,室内、室外都是靠步行空间进行组织和联系。步行空间本身也是一道靓丽的风景,可观、可游、可憩。研究从步行空间的视角,探求苏州园林步行空间的类型和布局,尺度和界面,设计特点与方法,丰富了苏州园林的研究内容,也为当代城市公共空间和慢行系统设计提供启示。
2 研究区域、指标和方法
2.1 研究区域和对象
苏州市位于江苏省东南部,长江三角洲中部,是国家历史文化名城和风景旅游城市,长江三角洲重要的中心城市之一,东临上海,南接嘉兴,西抱太湖,北依长江。研究区域位于苏州古城境内,地势平坦,河港交错,湖荡密布(图1)。
研究对象依据园林面积、建成年代、知名度和造园要素特点,选择了具有代表性的9座园林,分别为拙政园、狮子林、留园、网师园、怡园、耦园、沧浪亭、环秀山庄和艺圃。由于考察时园林的部分空间正值维修或管理用房而不对外开放,因此把对外开放的部分作为研究范围,拙政园只将保留了原始风貌的东部作为研究范围,研究对象概况(表1)。

图1 研究区域及对象

表1 研究对象概况
2.2 空间理论与测度指标
2.2.1 步行空间类型
“构成学”理论提出形态构成的基本要素为“点”、“线”、“面”、“体”,“风景园林设计”是“复杂的构成”,风景园林要素可抽象为形态构成要素[13]。风景园林步行空间通常由“步行路径”和“休息空间”共同组成。从形态构成的维度“步行路径”可抽象为“线空间”,“休息空间”可抽象为“面空间”,因此将步行系统划分为“线空间”和“面空间”两大类型。
日本建筑师黑川纪章提出“灰空间”[14]的概念,意指建筑与其外部环境之间的过渡空间,以达到室内外融合的目的,比如建筑入口的廊柱、檐下等。苏州园林有诸多亭、台、楼、阁、榭、廊、舫等园林建筑空间构成步行系统的休息空间,故以“室内空间”、“室外空间”、“灰空间”作为步行系统“线空间”的二级类型划分。
2.2.2 空间尺度
芦原义信针对外部空间尺度[15]提出了“十分之一理论”和“外部模数理论”,并提出D/H对空间尺度进行度量:邻幢间距(D)与建筑高度(H)之比,D/H为1.5~2是使用最多的数字。西特、吉伯德、林奇等人对欧洲广场的空间尺度进行研究,认为理想的D/H应控制在1~3之间。本研究以D/H作为步行空间尺度的测度指标,尝试探求苏州古典园林的空间尺度模数。
2.2.3 空间界面
空间界面包括了基面(底面)、顶面和垂直界面,是空间构成的基本要素[16]。在外部空间环境中,场地一般是由基面和垂直面来限定的,通过对界面的形状、大小、色彩、肌理、质感、开口等处理,来进行视觉和情感设计。选取“基面”和“垂直面”为测度指标,研究苏州古典园林的步行空间节点。
2.3 研究方法
2.3.1 空间注记法
空间注记法[17]融合了基地分析、序列景观、心理学、行为建筑学等环境分析方法的优点,侧重于个体对空间场所的感性认知,是空间特点的系统表达。空间注记通过认知途径、注记表达和辅助技术3个基本内容,实现从空间观察到成果表述的构建过程。研究小组在2018年4月共9个考察日,每座园林配置3名研究员,将9座园林的研究结果逐一进行讨论、分析和汇总,形成基础数据库。
2.3.2 测量法与GIS空间分析
空间尺度D/H的测度,使用室外测距仪分别测量步行空间的宽度和高度,由于室外空间无法获得高度数据,只测量室内空间和灰空间。步行系统的空间布局研究,其中步行路径(“线空间”)采用手持GPS进行测量,“面空间”采用空间注记法标注,然后将测量的数据导入GIS平台进行叠加分析。
3 结果分析
3.1 步行空间类型与布局
从空间类型来看,苏州古典园林的整体特征为:①步行系统均由“线空间”和“面空间”构成,即便总面积最小的环秀山庄亦是如此,麻雀虽小,五脏俱全。②“灰空间”是构成“线空间”的主流,占比50%以上,其中耦园和网师园最多,高达90%以上。③“面空间”占园林总面积的30%~50%,以规则的类矩形为主,单个“面空间”的面积小(200~500 m2居多)、单个园林中的“面空间”总量多(6~30个不等)。④“室内空间”、“室外空间”与“灰空间”组合流畅,切换自如,无缝衔接,使得步行空间变化多端(图2)。
从空间布局来看,步行系统总体布局大致有两种类型:①分布在园林外围或者一侧,形成外环路网,如狮子林、艺圃、怡园和网师园,这种布局通常留出大面积空间给山、水要素。②相对均匀分布在整个园林中,如沧浪亭、留园、耦园、拙政园,但同时步行线路也做到疏密有致,留园“东密西疏”、拙政园“南密北疏”、沧浪亭“外密内疏”(内部线路为假山)、耦园“外密中疏”,这种布局使“游”和“憩”、“观”和“景”充分结合。
相邻的“面空间”形态变化丰富,“面空间”整体布局符合形式美法则,大小结合、协调而均衡。“面空间”与“线空间”的组合形式多样,如单侧相邻、多侧相邻、单面相接、多面相接、单线串联、多线串联、“线”包“面”、“面”夹“线”、“口”字形、“日”字形、“田”字形,苏州古典园林善于利用以上空间的组合型进行布局(图3)。“面空间”与“线空间”的多样组合,使得苏州古典园林步行系统花样繁多、引人入胜。

图2 苏州古典园林步行空间类型与布局
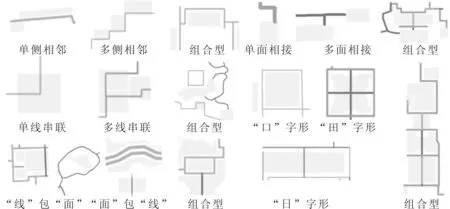
图3 苏州古典园林“线空间”与“面空间”的多样组合
3.2 步行空间尺度
分别对9个古典园林步行空间尺度进行了测量,由于室外空间线路无法获取H值,计算中将室外空间D/H赋予零值。测量过程中,以“面空间”和两条线路交汇处作为节点,将较长的线路分段处理,然后将测量的D和H值赋值到对应的线段上,在GIS平台中计算D/H值,采用自然断裂法分为四类。
结果表明:①苏州古典园林步行空间尺度较小,D/H阈值为0~1,绝大多数步行空间D/H在0.3~0.6之间,适宜1-2人单侧通行,与现代风景园林空间形成极大反差,显现出苏州园林精致玲珑的风格特点。②D/H值与园林总面积无明显关联,面积较大的拙政园D/H最大值为0.6,而面积较小的环秀山庄D/H最大值为0.8。③D/H值为0.5~1.0之间的步行空间全部为“灰空间”,多数为建筑周边的平台或庭院周边的廊道,提供了较为宽敞的观景和休息功能,与现代广场的空间尺度(1~3)相比,苏州园林步行系统的“面空间”尺度更宜人,提供了适合3~5人的休息及活动范围。
3.3 界面与空间设计
3.3.1 基面
苏州古典园林步行空间基面设计有如下特点:①多用“折线”。折线形式在“室内空间”(建筑组合)、“灰空间”(主要为游廊)、“室外空间”(桥)中被反复使用;折线形式多和“天井”、“庭院”、“亭子”相结合,创造富于变化的空间形态,赋予多样的空间功能。②善用“梯形”。梯形的使用有两种情况:其一“有意为之”,利用梯形两个斜边的特殊形态创造步行线路中短暂停留、驻足赏景的空间,多和“亭”相结合;其二“合理处理边界空间”,建筑物和园林外围边界之间容易留出不规则的空间,利用建筑物的直边和围墙的斜边设计成梯形,能最大限度地利用空间,且形态规整美观,通常形成通道或是天井。③“双线”(复廊)的使用。这种设计手法在沧浪亭、狮子林和怡园都有所呈现:沧浪亭的“复廊”位于园林西南角的边界线,分隔园林内外空间;狮子林的“复廊”位于园林南侧一角,作为一个景观节点;怡园的“复廊”位于园林中心偏东,把整个园子分隔为东西两部分。显然“复廊”具有分隔空间、作为景观节点和处理边界的作用。此外,“复廊”的优势还有类似“双向车道”能引导双向人流。在“复廊”两侧的垂直界面开口,设计成花窗,提供多种视觉窗口,“复廊”两侧的景观设计为不同类型,一侧为水景一侧为庭院,使得双向步行的景观视线都有所不同。在“复廊”中心的垂直界面开口,设计成出入口或者花窗,出入口使得两侧交通自如,花窗提供了趣味性的视觉窗口,都别有一番风味(图4)。
3.3.2 垂直界面
垂直界面的处理有如下特征:①边界的处理。园林的围墙处理,通常有连续的、起伏的天际线,善用植物和景石创造自然的画面,如留园西南角的围墙设计。“室内空间”和“灰空间”一侧的墙面设计,多用形态多样的“花窗”、“字”、“画”、“对联”等进行装饰。②“开口”设计。苏州园林随处可见大大小小的“洞口”,用来提供视觉窗口(如,花窗、景框),给狭小的空间增加光线,或给出入口增添一些野趣(如,月亮门、花瓶门)。③自然动态景观。动态景观的形成离不开自然的光、影、风、雨、雪、植物生长等做“景”,离不开人工设计的墙面做“衬”,离不开“开口空间”提供 “框”。苏州园林的“框景”、“漏景”手法也都常见于步行空间中,一明一暗、光影变幻、雨雪风霜、植物摇曳,都给步行空间的垂直界面平添色彩。
3.3.3 空间设计
由于“灰空间”是苏州园林步行系统“线空间”的主要类型,研究对千余张照片进行分析,归纳总结出“灰空间”有四种基本形态,其他类型都是通过“基本形”发展变化而来。①“单块板单视线”,步行空间在单侧,景观视线在单侧。②“单块板双视线”,步行空间在中间,景观视线在两侧。③“两块板双视线”,步行空间在中间,景观视线在两侧。④“两块板单视线”,步行空间在两侧,景观视线在中间(图5)。
步行空间设计,有三个基本手法:①宜游。“灰空间”的顶面,具有遮阳挡雨的功能,一年四季适宜出行,增加可步行性。②可坐。几乎所有的步行空间都能利用两侧的石阶,设计成人可坐的高度,方便随时逗留、小憩。③好赏。空间不论大小,都有足够多的“景”和观景的“口”,让步行过程中好玩好赏。
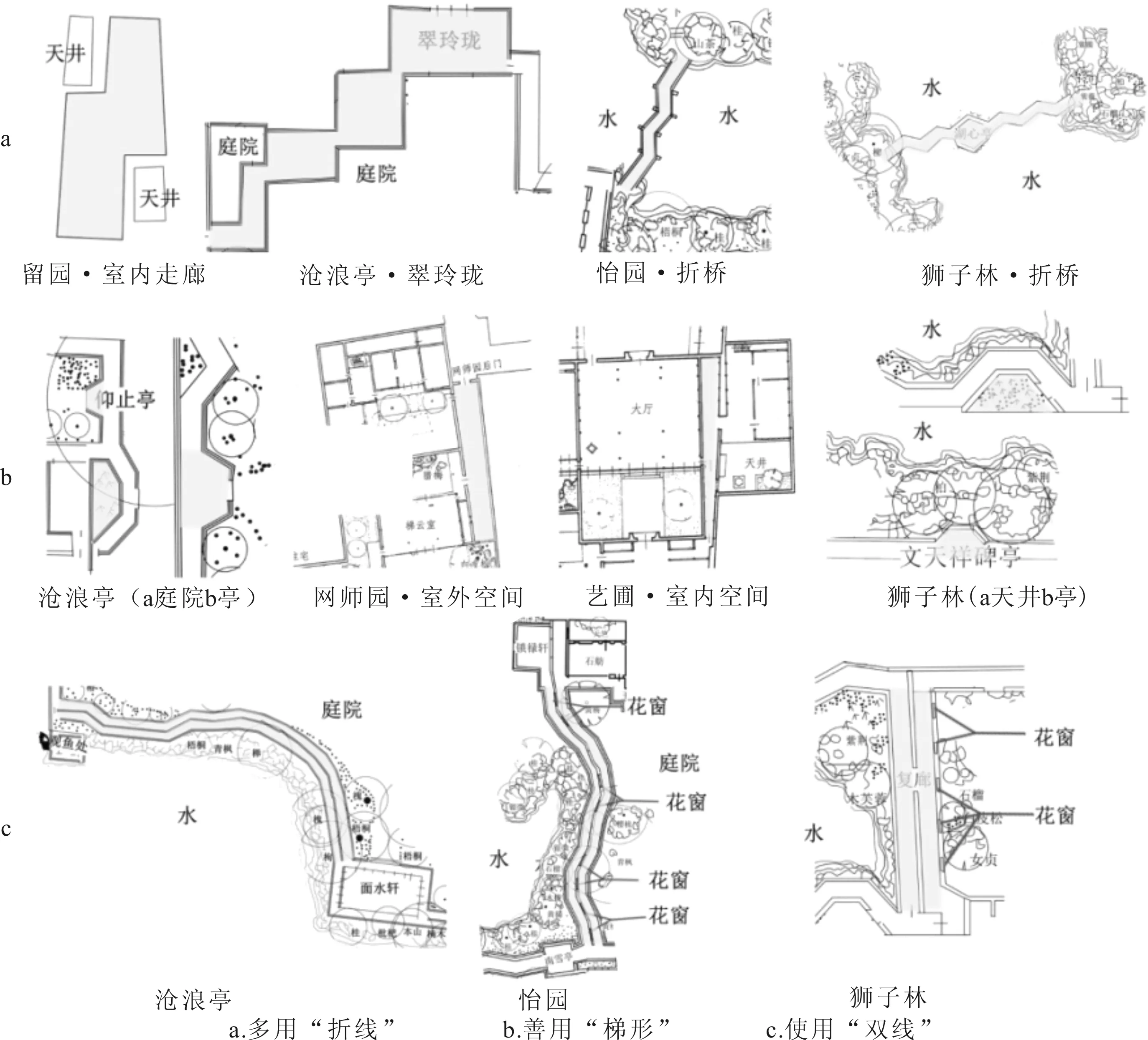
图4 苏州古典园林步行空间基面设计

图5 苏州古典园林“灰空间”基本形态
4 结论与启示
4.1 结论
通过空间注记法、测量法和GIS空间分析法,对苏州市9座古典园林实地考察,研究了其步行系统的类型与布局、空间尺度、界面及空间设计。主要结论如下。
(1)步行系统分为“线空间”和“面空间”两大类,其中“线空间”包括“室内空间”、“灰空间”和“室外空间”,三者衔接流畅,自由组合,变化万千。“面空间”占园林总面积的30%~50%,“灰空间”占线空间总长度的50%以上,二者是步行空间的主要类型。
(2)步行系统的空间布局有两种主要类型,布局在园林外围或均匀布局在园林中,二者各具优势。“线空间”与“面空间”的组合有11种基本形,包括:单侧相邻、多侧相邻、单面相接、多面相接、单线串联、多线串联、“线”包“面”、“面”夹“线”、“口”字形、“日”字形、“田”字形。
(3)苏州园林步行空间尺度(D/H值)的模数为0.3~0.6,创造适宜1-2人单侧通行的步行空间,D/H值为0.5~1.0之间的空间全部为“灰空间”,提供了适宜3~5人的休息活动范围。步行空间尺度设计(D/H值)与园林总面积无关,与广场设计的D/H相比,苏州园林的D/H值偏低、尺度小,形成了独有的精致玲珑的空间特点,尺度的压缩可增加步行路径长度从而提高园林整体可游性。
(4)基面设计方法,具有多用“折线”、善“梯形”、使用“双线”的特点。垂直界面设计,创造连续起伏的边界,使用植物、景石、字画、对联、花窗进行墙面装饰,大胆“开口”,注重“视”和“景”的互动,营造自然动态景观。
(5)“灰空间”设计有四种基本形,即“单块板单视线”、“单块板双视线”、“两块板双视线”和“两块板单视线”。步行空间设计具有三个基本手法,即“宜游”、“可坐”、“好赏”,使得苏州园林的可步行性强,步行空间景观性高、趣味性强。
4.2 对现代城市公共空间设计的启示
苏州古典园林“小中见大”、“步移景异”的造园艺术,除了“理景”(景观节点),更离不开“梳景”(步行系统)。景点、视线、步线构成了完整的“景—视—行”系统,不可分割。对比现代城市公共空间设计和步行系统设计,有以下建议。
(1)现代城市公共空间,尤其公园和广场,贪多求大,注重“景”的设计,忽略“观”的营建,实际利用率并不高。现代城市公共空间应注重小尺度景观的营建,增加D/H值为0.3-0.6尺度的步行“线空间”,增加小尺度(D/H为0.5-1)游憩“面空间”的比例,“线空间”中增加“室内空间”和“灰空间”的类型,建立“室内-室外-灰空间”无缝衔接、任意切换的步行系统,注重“线”与“面”的空间组合方式。
(2)城市公共空间中的步行空间设计,可借鉴苏州古典园林“灰空间”的四种基本类型,“单块板单视线”、“单块板双视线”、“两块板双视线”和“两块板单视线”。注重基面设计,适当引用“双线”的设计手法,增加空间趣味性;注重“垂面设计”,适当“开口”,形成空间的交互渗透;注重“顶面设计”,增加“顶面空间”的数量、丰富“顶面空间”的形态。
(3)“宜游”、“可坐”、“好赏”,同样是影响城市公共空间的活力的重要指标。“好赏”,可以通过城市公共空间交通设计、空间组织、景观序列建构和景观节点的细部设计来实现,而“宜游”和“可坐”其实是对公共空间的舒适性和功能性提出具体要求,各类公共空间和景观节点都可以通过微更新的方法实现局部改造,虽然不可能像古典园林那样设计大面积的园林建筑和游廊,但可以利用现代化的技术方法,例如增加可移动的景观座椅,智慧化的景观设施来实现。
猜你喜欢
中国中小学美术(2022年4期)2022-05-31
数学大王·中高年级(2022年5期)2022-05-22
计算技术与自动化(2022年1期)2022-04-15
特区文学·诗(2021年6期)2021-12-22
现代苏州(2021年20期)2021-11-02
今日农业(2021年4期)2021-06-09
现代装饰(2021年1期)2021-03-29
青年文学家(2020年22期)2020-08-31
金桥(2018年6期)2018-09-22
岷峨诗稿(2014年3期)2014-11-15