
HSR-JR605工业机械臂的运动仿真研究
2020-07-16 01:53刘海燕游庆如林春兰肖隆信
广西科技大学学报 2020年3期
刘海燕,苏 宇*,游庆如,林春兰,肖隆信
(1.广西科技大学 职业技术教育学院,广西 柳州 545006;2.吉林化工学院 机电工程学院,吉林 吉林 132000)
0 引言
机器人从出现至今,已经广泛应用于国民经济的各个领域.串联机器人是具有多个DOF(Degree of Freedom)的开链型连杆结构,由多个关节经过接触面连接到一起.开链式连杆结构的一端固定在基座上,另一端是机器人的末端执行器,中间则由一些杆体(刚体)通过活动关节串接而成.常用的活动关节多为R(旋转关节)和P(平动关节).机器人运动学的研究内容是建立刚体连杆的运动与机器人末端执行器的位置、方向之间的关系,描述其在全局笛卡尔坐标系中的配置,为机器人的运动控制提供分析方法和手段[1-4].
MATLAB Robotics Toolbox工具箱是由澳大利亚科学家Peter Corke教授开发并维护的免费的机器人学工具箱[5],提供了机器人学研究中许多重要功能的参数,包括机器人运动学分析、动力学分析、轨迹规划等[6].许多学者采用MATLAB Robotics Toolbox工具箱对机器人的运动特性进行仿真,如左富勇等[7]对SCARA机器人进行轨迹规划与仿真;王智兴等[8]对Standford机器人进行轨迹规划和仿真;陆佳皓等[9]对ER3A-C60机器人进行运动学仿真;王林军等[10]对ABB IRB1660点焊机器人进行轨迹规划和仿真,但针对HSR-JR605工业机械臂的运动学仿真几乎没有.本文针对HSR-JR605工业机械臂进行正向和逆向运动学仿真,并对其末端操作器的轨迹运动进行了仿真,为HSR-JR605工业机械臂的进一步研究提供思路.
1 建立HSR-JR605工业机械臂运动仿真模型
首先对华数机器人HSR-JR605的本体结构进行技术参数分析.从用户手册可知,HSR-JR605型机器人为6R型工业机器人,即机器人所具有的自由度数为6,且全部为旋转关节.前3个关节J1、J2、J3控制着机器人末端执行器手腕的空间位置,而后3个关节J4、J5、J6控制着机器人末端执行器手腕的姿态.HSRJR605工业机械臂的简化原理模型如图1所示.
具有n个关节的串联机器人具有n+1个连杆,为了求得机器人零部件的运动信息,基于D-H标准方法,可以刚性地在位于关节i+1的每个连杆(i)上建立一个局部坐标系Bi.
考虑HSR-JR605工业机械臂的关节偏置值和连杆长度值(如表1所示),这些值说明了每根连杆的长度和类型,从而确定求解正向运动学问题所需要的变换矩阵.
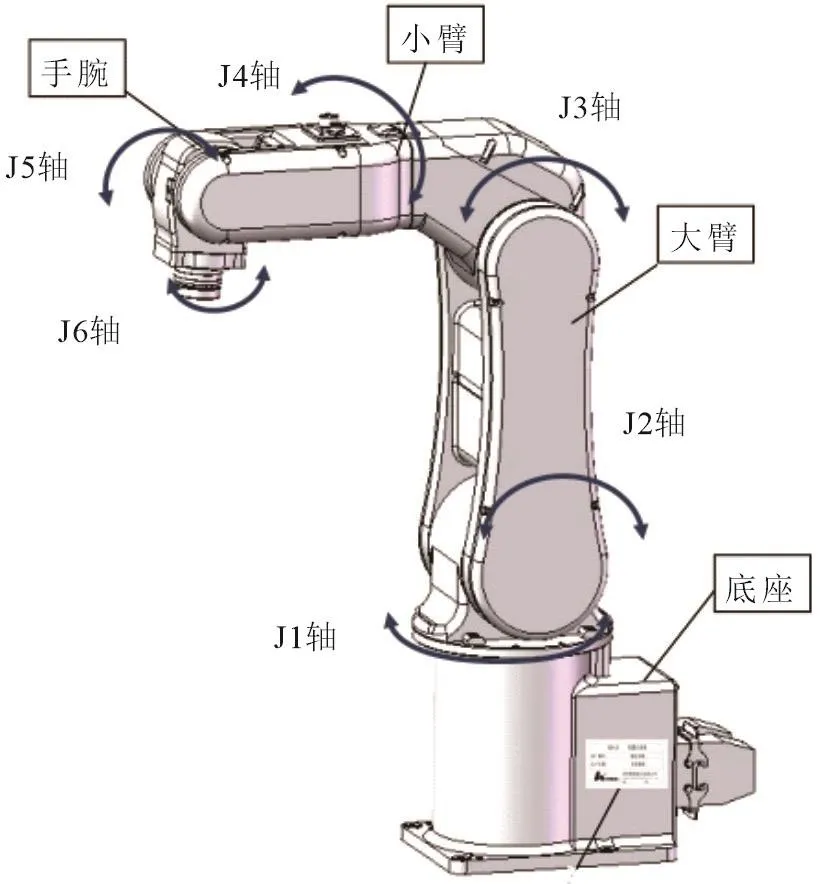
图1 HSR-JR605工业机械臂简化模型Fig.1 Simplified model of HSR-JR605 industrial manipulator
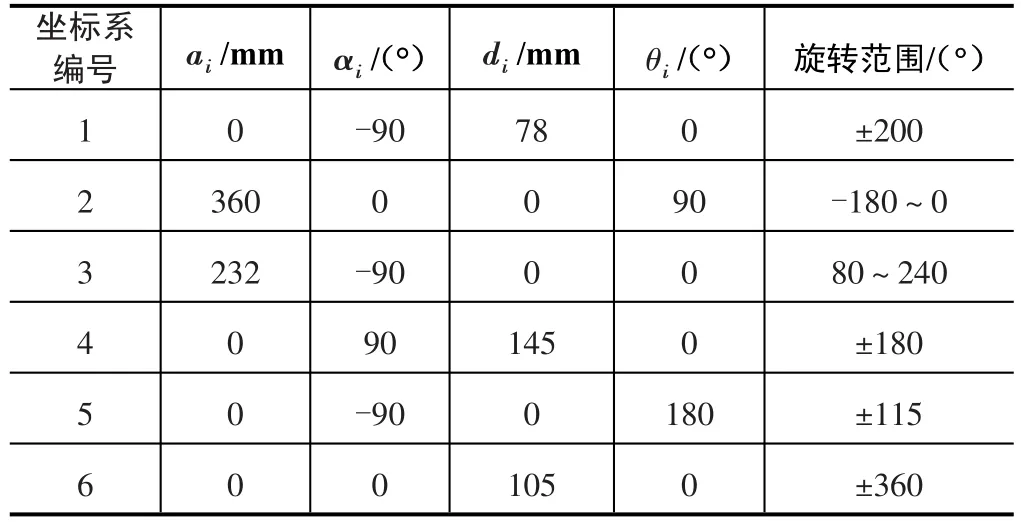
表1 HSR-JR605工业机械臂的D-H参数Tab.1 D-H parameters of HSR-JR605 industrial manipulator
其中:参数ai是连杆(i)的运动长度,是指沿着xi轴的zi-1轴和zi轴之间的距离;参数αi是连杆扭转角,是指zi-1轴绕着xi轴所转动的角度;参数di是连杆偏置值,是指沿着zi-1轴的xi-1轴和xi轴之间的距离;参数θi是xi-1轴绕着zi-1轴所转动的角度.参数ai和参数αi被称为连杆参数,定义了连杆(i)两个末端处的关节i和关节i-1的相对位置;参数θi和di被称为关节参数,确定了由关节i所连接的两相邻连杆的相对位置.
2 建立HSR-JR605工业机械臂运动学方程
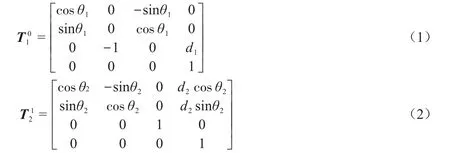
2.1 写出相邻杆件的位姿矩阵
连杆(1)是R├R(-90°),连杆(2)是R‖R(0°),因此有:
连杆(3)是R├R(-90°),连杆(4)是R┤R(90°),因此有:

连杆(5)是R├R(-90°),连杆(6)是R‖R(0°),因此有:

变换矩阵Ti-1i(i=1,2,…,6)的正向乘积可求得HSR-JR605工业机械臂的正向运动方程:

2.2 在MATLAB中构建HSR-JR605工业机械臂的仿真模型
在使用MATLAB对HSR-JR605工业机械臂进行运动仿真时,首先要搭建相应的HSR-JR605工业机械臂仿真模型.仿真使用的软件版本为:MATLAB(2019a)及Robotics Toolbox for MATLAB(release 10.2).
在MATLAB Robotics Toolbox中使用SerialLink功能函数构建HSR-JR605工业机械臂连杆仿真模型,程序如下:
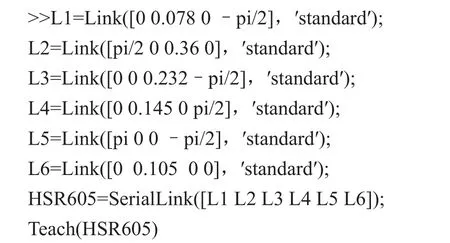
其中:pi=π.得到HSR-JR605工业机械臂的三维模型以及驱动器如图2所示,可通过调节滑块驱动HSR-JR605工业机械臂的各关节运动.
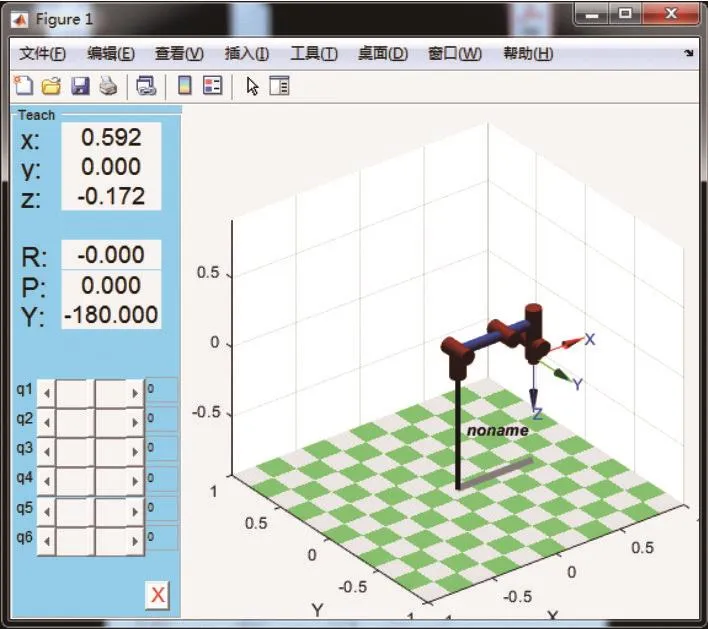
图2 HSR-JR605工业机械臂三维模型图Fig.2 3D model of HSR-JR605 industrial manipulator
3 正向、逆向运动学仿真分析
运动学研究的是机械臂的运动学特性,而不去考虑使机械臂运动时所施加的力的大小.机械臂正向运动学是已知一组给定的关节变量,可以求取机械臂末端执行器的位置和方向;机械臂逆向运动学则是已知机械臂末端执行器的位姿,反求各个关节的转动角度.本文调用MATLAB Robotics Toolbox中功能函数fkine和ikine分别对HSR-JR605工业机械臂的正向、逆向运动学进行仿真计算.
3.1 HSR-JR605工业机械臂正向运动学仿真
首先要找到一个合适的HSR-JR605工业机械臂6个关节的转角值,考虑到在求解逆向运动学方程时可能遇到的一个问题就是多解问题,对于一个全部为旋转关节的6自由度操作臂而言,可能有16种解[9],比较合理的选择是取最近解.经过尝试计算,选择HSR-JR605工业机械臂6个关节的转角值均为:pi/6.
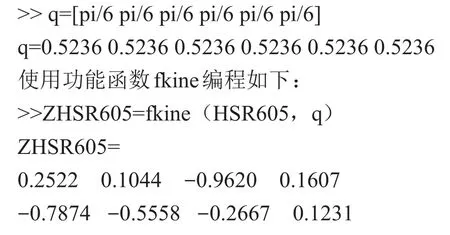

ZHSR605即为HSR-JR605工业机械臂在各关节转角向量为q时的末端执行器的姿态.
3.2 HSR-JR605工业机械臂逆向运动学仿真
假设已知HSR-JR605工业机械臂末端执行器的空间姿态为ZHSR605,反求各个关节的转动角度.使用MATLAB的功能函数ikine编程如下:

NHSR605工业机械臂即为已知HSR-JR605工业机械臂的末端执行器位置姿态为ZHSR605工业机械臂时各关节的转角.
由上述仿真结果可以看出:NHSR605=q.证明在MATLAB中构建的HSR-JR605工业机械臂仿真模型完全正确.
4 HSR-JR605工业机械臂运动轨迹规划
在完成对HSR-JR605工业机械臂系统的运动学仿真和分析的基础上,继续利用MATLAB Robotics Toolbox工具箱中的jtraj函数用于实现机器人运动轨迹规划.在关节空间可以利用jtraj函数进行插值运算,最终可以得到各采样时刻下各个关节的旋转角度值、关节速度值以及关节加速度值[5-6].jtraj函数采用7次多项式插值,默认的起始终止速度为0[5-6].假设HSR-JR605工业机械臂要在时间为t=0到t=10s内,从HSR-JR605工业机械臂的机械原点即零初始状态qz=[0-pi/2 pi 0 pi/2 0]出发,要求平稳运动到目标点qt=[pi pi/2 pi/3 pi/4 pi/5 pi/6],则在此关节空间进行的点对点的轨迹规划过程就是:

其中:qz矩阵中的每行代表一个时间采样点上各关节转动的角度值大小,而qd和qdd分别是qz矩阵对应的各个关节速度向量值大小以及关节加速度向量值大小.利用MATLAB Robotics Toolbox工具箱中的subplot函数和plot函数以三维动画的形式演示整个运动过程状态,调用语句为:
其中i为关节标号,从中可以得到各关节的转动角度q、关节速度qd、关节加速度qdd曲线分别如图3—图5所示.
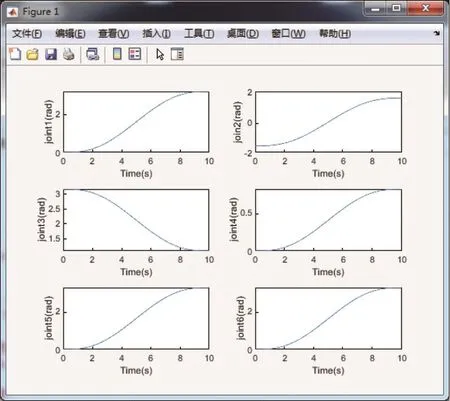
图3 HSR-JR605工业机械臂各关节角度仿真曲线Fig.3 Simulation curve of HSR-JR605 industrial manipulator's joints angle
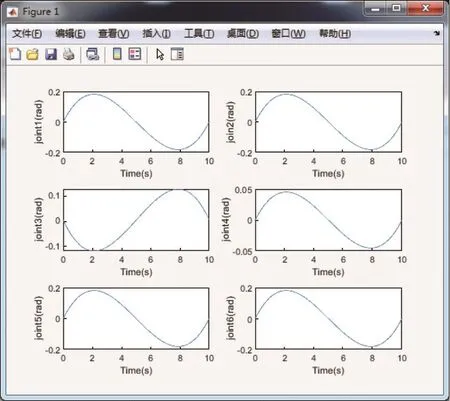
图4 HSR-JR605工业机械臂各关节角速度仿真曲线Fig.4 Simulation curve of angular velocity of HSR-JR605 industrial manipulator's joints
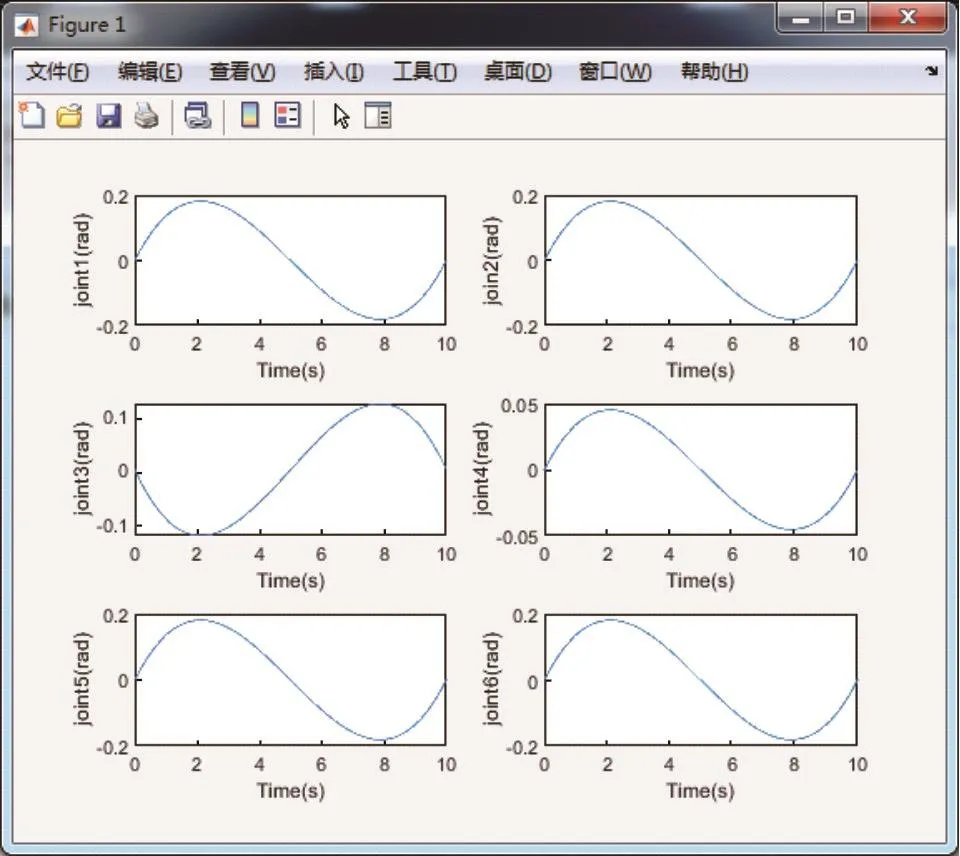
图5 HSR-JR605工业机械臂各关节角加速度仿真曲线Fig.5 Simulation curve of acceleration angle of HSR-JR605 industrial manipulator's joints
从图3—图5可以看出,曲线连续、平稳,无断点、跳跃、拐点等现象.
5 结束语
对华数机器人有限公司生产的HSR-JR605型工业机器人连杆坐标系的建立方法、末端执行器的变换矩阵推导、运动学方程、正向运动学、反向运动学、关节空间PTP(Point to Point)轨迹规划仿真等进行了研究.使用D-H参数法对HSR-JR605工业机械臂进行运动学正反解分析,并在MATLAB Robotics Toolbox工具箱中建立了HSR-JR605工业机械臂的虚拟仿真模型,同时调用工具箱中的两个功能函数fkine和ikine分别对其进行正、逆运动学仿真,选择合适的q值.正向、逆向运动学仿真结果:N=q,证明在给出的HSR-JR605工业机械臂的D-H参数下使用MATLAB Robotics Toolbox构建的仿真模型完全正确;调用jtraj函数对关节空间点到点(PTP)轨迹规划进行仿真分析,各关节运动性能良好、曲线平稳无扰动和断点,为HSR-JR605工业机械臂的进一步研究提供思路.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年8期)2019-09-03
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年9期)2017-11-27
汽车实用技术(2017年16期)2017-09-21
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
