基于E3JK-DR11-C光电传感器立体停车位检测系统研究
2020-07-16 03:01吴雪娜高远路
中国新技术新产品 2020年9期
高 猛 吴雪娜 韩 雄 高远路
(1.沈阳工学院机械工程与自动化学院,辽宁 抚顺 113122;2.辽宁通用重型机械股份有限公司,辽宁 调兵山 112700)
1 立体停车位结构原理
立体停车位为路边式双层或多层钢结构车位,车位缩短了车位长度方向的尺寸,这样的设计与常规停车位相比,大大缩短了停车入位时所需车位的额外长度(常规停车位长7.5 m,设计的停车位长5 m,2.5 m 长度为驾驶员泊车的额外操作空间),提高了路边停车位长度方向的利用率,同时双层或多层结构设计也大大提高了高度方向的利用率。设计方案以4 个常规停车位空间为例,设计成路边式双层钢结构车位后,2 层就可以停放12 台家用轿车,空间利用率可提高到300%,停车位结构原理图如图1 所示[1]。
基于立体停车位的特殊停车操作过程,该文开发了一种传感检测系统。具体停车过程为驾驶员驾驶车辆驶入立体停车位区域后,减速并靠近车位停车,将车辆前后轮分别停置在与路面平齐的2-板车上,然后确认车体前后端距离车位立柱的安全距离后,熄火下车,沿板车轨道方向推车体侧方,车便在板车上沿轨道停入车位,上下层停车位原理相同,驾驶员可经1-引桥驶入3-上层车位,采用同样的方式停车入位。由于车位长度尺寸与车体前后端的预留空间非常小,加之车轮必须停置在板车上,导致这种立体车位对驾驶员停车位置的精确度要求非常高,必须在车库的容差范围内,且由于车型不同,对停车精确度的要求也不同,车体越长,容差范围越小,对停车位置的精度要求越高,反之亦然。这就导致对驾驶员的驾驶技术有很高要求,为方便驾驶员停车,提高驾驶员的停车效率以及停车的精确度和安全性,该文开发了基于E3JK-DR11-C 光电传感器的立体停车位检测系统[2]。
2 传感器检测系统设计
针对车位停车功能要求,确立了传感检测系统具有的3个基本功能。1)检测车轮与板车的相对位置,确定车轮位置信息,确保车轮均停在板车上。2)检测车体前后端与车位立柱的安全距离,确保无干涉碰撞危险。3)以信号灯形式向驾驶员传达停车位置信息,使驾驶员不需要下车,便可调整车体位置,最终确定合格的停车位置。
具体检测过程如下:停车辅助传感检测系统由4 个E3JK-DR11-C 光电传感器作为信号采集端,3 个信号指示灯作为输出端,由单片机控制[3]。每个立体停车位的前柱与后柱分别安置2 个漫反射光电传感器,监测汽车车体前后端是否与停车位前后立柱存在干涉碰撞危险,如果传感器检测到车体前后端的干涉信息,则相应侧的信号指示灯亮红灯,驾驶员需要根据信号灯的信息,调整车体的前后位置,前侧红灯亮,缓慢倒车一段距离,至前侧红灯熄灭为止,后侧处理方式相同。在每个车位的2 个板车的中线位置分别安置1 个漫反射光电传感器,检测车轮是否在板车上,如果2 个传感器至少有1 个捕捉到了车轮信号,则绿灯亮起。在前后信号指示灯无红灯且中间位绿灯亮起时,驾驶员即可熄火泊车,然后推车入位。
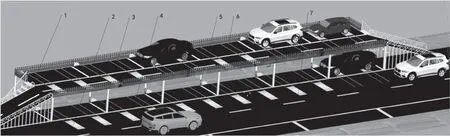
图1 立体停车位结构原理图
3 光电传感器选型设计
漫反射光电传感器以光电效应为物理基础,漫反射光电开关是一种集发射器和接收器于一体的传感器,当有被检测物体经过时,将光电开关发射器发射的足够量的光线反射到接收器上,于是光电开关就产生了开关信号。当被检测物体的表面光亮或其反光率极高时,漫反射式的光电传感器是首选的传感器类别。
漫反射光电传感器基本符合立体停车监测系统的设计要求,与其他原理的传感器相比,漫反射光电传感器的检测距离非常长,且为无接触式检测,所以不会损伤检测物体,使用寿命长并且稳定性强。工作时,漫反射光电传感器是对检测对象的表面进行反射,不受检测物体材料的制约。漫反射光电传感器在检测的过程中,传感器内部无机械运动,检测反应速度非常快。
漫反射光电传感器也具有一定的缺点,在户外立体车位设计的过程中,应尽可能地将传感器放置在粉尘污染小的地方,采取一定的防尘措施并建立维护制度。设计传感器的位置时,应尽可能地将传感器放置在车位内部,避免阳光直射[4]。
基于立体停车位的停车操作规程及传感器停车检测系统的功能要求,传感检测系统所选用的传感器必须满足反应快、精度高、使用寿命长、绿色环保等基本要求。立体停车位停车检测系统选用了欧姆龙的E3JK-DR11-C 扩散反射型光电传感器。传感器性能参数见表1。

表1 欧姆龙的E3JK-DR11-C 扩散反射型光电传感器参数表
4 传感检测系统实物仿真
传感检测系统实物仿真模块用于验证传感器检测性能及控制系统程序的可靠性,采用2-型材框架模拟单个停车位的框架结构,在框架左侧上方安置3-前端检测传感器,用于模拟检测车体前端与车位立柱的相对位置关系信息,在框架右侧上方安置8-后端检测传感器,用于模拟检测车体后端与车位立柱的相对位置关系信息,在框架下沿,按照实际车位方案设计的板车距离与车位长度尺寸比例安置4-前轮检测传感器和9-后轮检测传感器,用于模拟检测汽车车轮位置信号,框架正上方中间安置3 个LED 小灯,分别是5-前端信号灯,6-车轮信号灯,7-后端信号灯,用于模拟停车位传感器检测系统的信号输出显示。用大小合适的1-模型小车沿车位长度方向前后运动,模拟汽车停车过程,观察5-前端信号灯,6-车轮信号灯,7-后端信号灯的信号输出状态,5-前端信号灯亮红灯,表示车体前端超出停车范围,横向入库时候会与车位前立柱发生碰撞,需要驾驶员倒车至5-前端信号灯熄灭。同理,7-后端信号灯亮红灯,表示车体后端超出停车范围,横向入库时候会与车位后立柱发生碰撞,需要驾驶员驱车前进至7-后端信号灯熄灭,调整至5、7 信号灯均熄灭且6-车轮信号灯亮绿灯时候,满足停车要求。特别注意模型轮胎材料为橡胶,以便检验4-前轮检测传感器和9-后轮检测传感器对橡胶的检测效果。传感检测系统实物仿真模块可以真实模拟仿真车位停车过程及检测系统工作过程,确定了检测系统功能的有效性及单片机程序的适用性。传感检测系统实物仿真模块如图2 所示。

图2 传感检测系统实物仿真
5 结论
经过实物模型仿真测试,基于欧姆龙E3JK-DR11-C 扩散反射型光电传感器的停车位检测系统,可以有效实现其检测系统的设计功能,并且设计结构简单、成本低、检测效率高、信号反应快,检测系统稳定,单片机检测程序的可靠性、适用性高。立体停车位检测系统可以有效提高驾驶员停车的精确度和安全性,对该类立体停车位的应用与推广具有重要意义,同时对其他类似结构的汽车或大型物体的定位检测具有借鉴意义。
猜你喜欢
英语文摘(2020年7期)2020-09-21
小作家报·教研博览(2020年51期)2020-09-10
数学小灵通(1-2年级)(2019年5期)2019-05-21
小学科学(学生版)(2019年3期)2019-03-30
自然资源情报(2018年7期)2018-12-28
遵义(2018年13期)2018-08-08
小天使·一年级语数英综合(2018年6期)2018-06-22
小布老虎(2016年10期)2016-12-01
华人时刊(2016年19期)2016-04-05
思维与智慧·上半月(2016年3期)2016-03-11