电力机器人的自主导航与视觉辅助定位融合方法
2020-07-15 10:54谢晓娜曦2常政威2倩2
四川电力技术 2020年3期
谢晓娜,刘 曦2,常政威2,彭 倩2,许 硕
(1.成都信息工程大学控制工程学院,四川 成都 610025;2.国网四川省电力公司电力科学研究院,四川 成都 610041)
0 引 言
中国大力推进“科技兴安”战略,在重点行业领域开展“机械化换人、自动化减人”,大力提高企业安全生产科技保障能力。在电力行业,变电站巡检机器人[1-2]、地下电缆巡检机器人等移动机器人覆盖了发电、输电、变电、配电、用电等各环节,代替人工巡视、操作,发挥日益重要的安全保障作用。
导航是机器人在工作过程中要解决的最重要问题之一,也是实现机器人智能化和完全自主移动的关键技术[3]。变电站等场所的电力机器人导航方式,经历了巡线、轨道和全场定位等[4]。此外,基于视觉的导航方式[5],是通过摄像机实时采集图像进行目标点的监控与识别,指导机器人进行移动定位和导航。但仅依靠视觉定位导航是无法满足电力作业现场等复杂环境下的要求,与其他导航方式相融合是一个新的研究方向[6]。
目前,基于激光传感器即时定位与地图构建(simultaneous localization and mapping,SLAM)的定位和导航方式[7]是变电站巡检机器人主要采用的技术。SLAM不需要依靠应用场所的辅助物,机器人前进、后退、转弯、掉头环节稳定可靠。但对于电力作业现场复杂环境下,机器人需要准确到达任务位置,并准确巡视预置位图像以识别故障或安全隐患时,仅靠激光SLAM全场定位方式,可能导致定位不满足要求,迫切需要研究新的多数据融合机器人导航方式。
为了改进变电站、高电压实验室等电力作业现场的机器人定位精度,提出了一种自主导航与视觉辅助定位融合方法,在基于激光SLAM的自主导航基础上,对机器人位置和视觉角度进行再次校准,使其能够准确获得预置位图像。在实验室的应用结果表明,所提方法定位精度可达到1 cm。
1 问题简介
以实验室内配电变压器试验过程中的安全巡检为例,电力机器人可在试验作业过程中,自主导航到达不同的预设位置,实时对典型安全风险、不安全行为进行实时识别和预警提醒,如表1所示。

表1 机器人巡检要点
在每个巡检步骤中,机器人必须准确导航到已设定的最优位置,才能保证准确拍摄和识别图像。以温升试验阶段巡检为例,如图1所示,只有准确定位后并完整拍摄围栏内区域,才能有效开展巡检图像分析,对人员误闯入、设备接线空间位置变化、冒烟等异常及时警示和报告。如果定位不准确,则可能拍摄的视频图像不完整、存在较大偏差,无法正确执行巡检任务。

图1 温升试验阶段巡检监视图像
2 视觉辅助定位方法
2.1 激光SLAM导航与视觉辅助定位融合
结合现有的机器人架构,提出一种基于激光SLAM导航与视觉辅助定位相结合的方法,整个流程如图2所示。
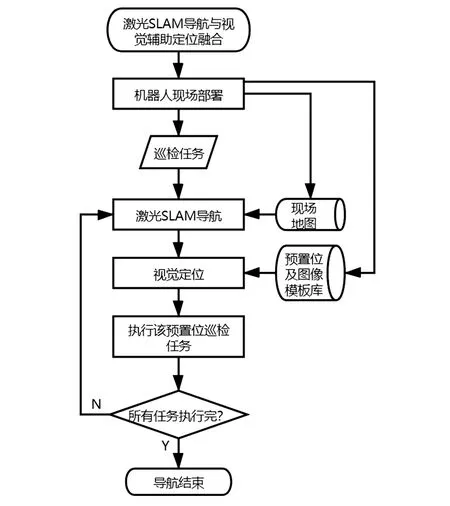
图2 激光SLAM导航与视觉辅助定位
在部署环节,机器人通过激光传感器扫描,采用预建地图的方式,将地图存放于机器人数据库。同时,结合具体巡视任务,将机器人对应的停靠定位、拍摄的标准预置位图像模板保存在数据库中。
在根据接收到的巡检任务自主导航时,机器人根据所采样的信息,通过概率统计方式匹配地图中的位置,计算导航路径。同时,采用电子陀螺仪等辅助传感系统来定位和辅助机器人调控运动姿态,从而达到激光SLAM导航的目的。
机器人到达指定位置后,精度可能不满足特定巡视任务的要求,此时视觉定位模块通过对摄像头图像以及查询数据库得到的预置位图像模板进行分析处理,并对应调整机器人位置等,直到精度满足要求为止。
机器人准确定位后,利用可见光摄像机和红外摄像机执行在该预置位的巡检任务。然后,依次导航到其他位置并再次校准,执行每个预置位的巡检任务,直到完成所有的任务才回到充电位置,导航结束。
由此可知,与单一的激光导航方式不同,所提方法在部署环节即建立了预置位对应的图像模板库,作为视觉定位环节的校准图像依据。在巡检过程中,实现激光SLAM导航与视觉辅助定位的实时融合。
2.2 基于视觉图像的定位校准
机器人能够准确执行任务的前提是它可以精确导航并停靠在定位处,然而当由于环境的特殊性、机器人的误差等原因而导致无法满足定位要求时,提出采用一种基于视觉图像的定位校准算法,以减少定位误差和改进精度,其主要步骤如图3所示。

图3 基于视觉图像的定位校准流程
首先,机器人读取在当前位置采集到的视频图像,提取图像的轮廓定位,并和已保存的该预置位图像模板比对,使用基于哈希(Hash)的图像匹配算法[8]判别两幅图像的相似度。
计算机器人位置偏差的前提,是计算像素与实际距离比例。图4[9-10]为摄像机成像模型:(xc,Oc,yc)表示摄像机坐标系;原点Oc为摄像机中心的位置;平面π为成像平面;m为摄像目标物体,其映射在π上得到点m′。显然,可知:
(1)
式中,p为实际坐标与像素坐标的比例关系。
考虑机器人摄像机当前图像和预置位图像模板中,机器人与目标物体的垂直距离基本相同。根据前面计算得到的图像轮廓,计算当前图像中窗体中心的坐标值(x′,y′),而图像模板窗体中心在其坐标系下的坐标值记为(x,y),计算得到机器人的位置偏差:
Δd≈p·(x′-x)
(2)
根据Δd与机器人允许的最大误差值相比,如不满足要求,则机器人据此重新定位。

图4 摄像机成像模型
3 视觉辅助定位方法的应用
3.1 应用环境及测试方法
如图5所示,为了验证所提视觉定位方法的精度,在某配电变压器实验室现场进行导航和定位性能测试,图中左下角为工作中的机器人。由于在试验准备及进行过程中,存在叉车搬运、人员进入围栏区域等行为步骤,如机器人的定位和导航精度不高,可能会导致误碰撞或巡视结果不准确等后果。

图5 实验室应用
机器人基于激光SLAM构建的实验室地图如图6所示。

图6 机器人构建的实验室地图
测试方法为:配置机器人预置点位,通过自主导航的方式让机器人前往不同的预置点,同时测量机器人定位误差和角度误差。首先在实验室配置了11个点位,如表2所示。然后,基于激光SLAM定位方法对11个点位分别执行5次定位。经测量,最大定位误差在5 cm范围内。
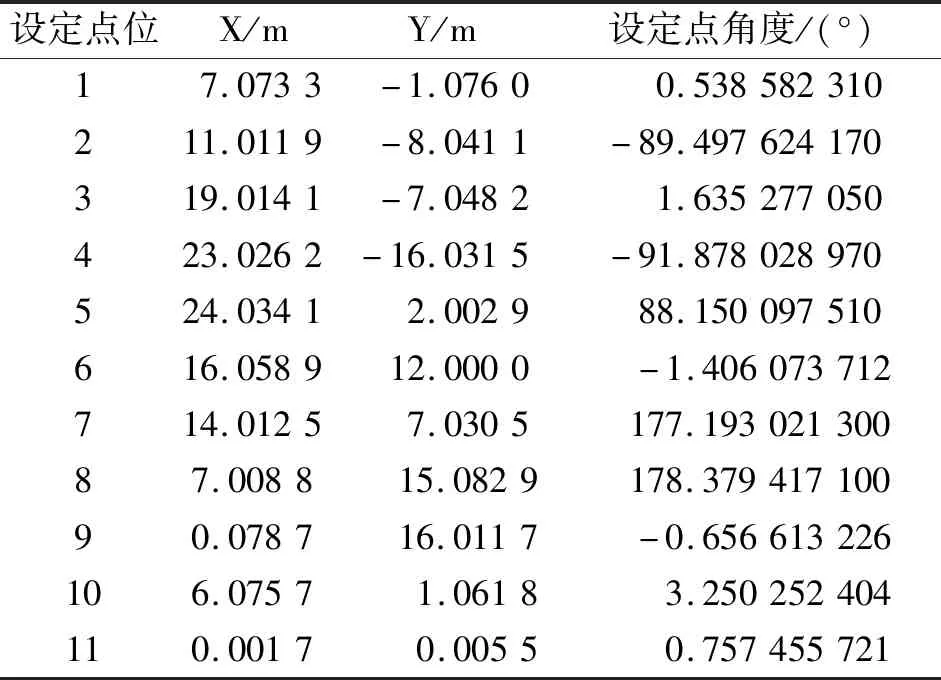
表2 实验室现场配置点位
3.2 视觉辅助定位精度试验
基于激光SLAM与视觉融合定位,进行第1组定位试验,分别记录定位误差,如表3所示。

表3 第1组定位误差
可以看出,最大的X偏差、Y偏差分别约为0.49 cm、0.16 cm,即最大定位误差为0.49 cm;最大角度偏差约为0.92°。
按照该方式进行多组定位测量,第2至第5组结果如表4所示。
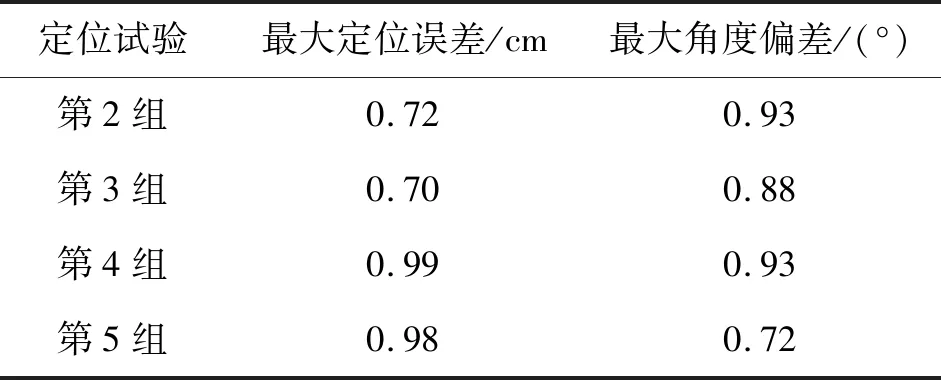
表4 第2至第5组定位误差
然后,选定一点进行连续20次定位测量,计算定位误差和角度误差,如表5所示。可以看出,最大定位误差为第11次的Y偏差0.75 cm。
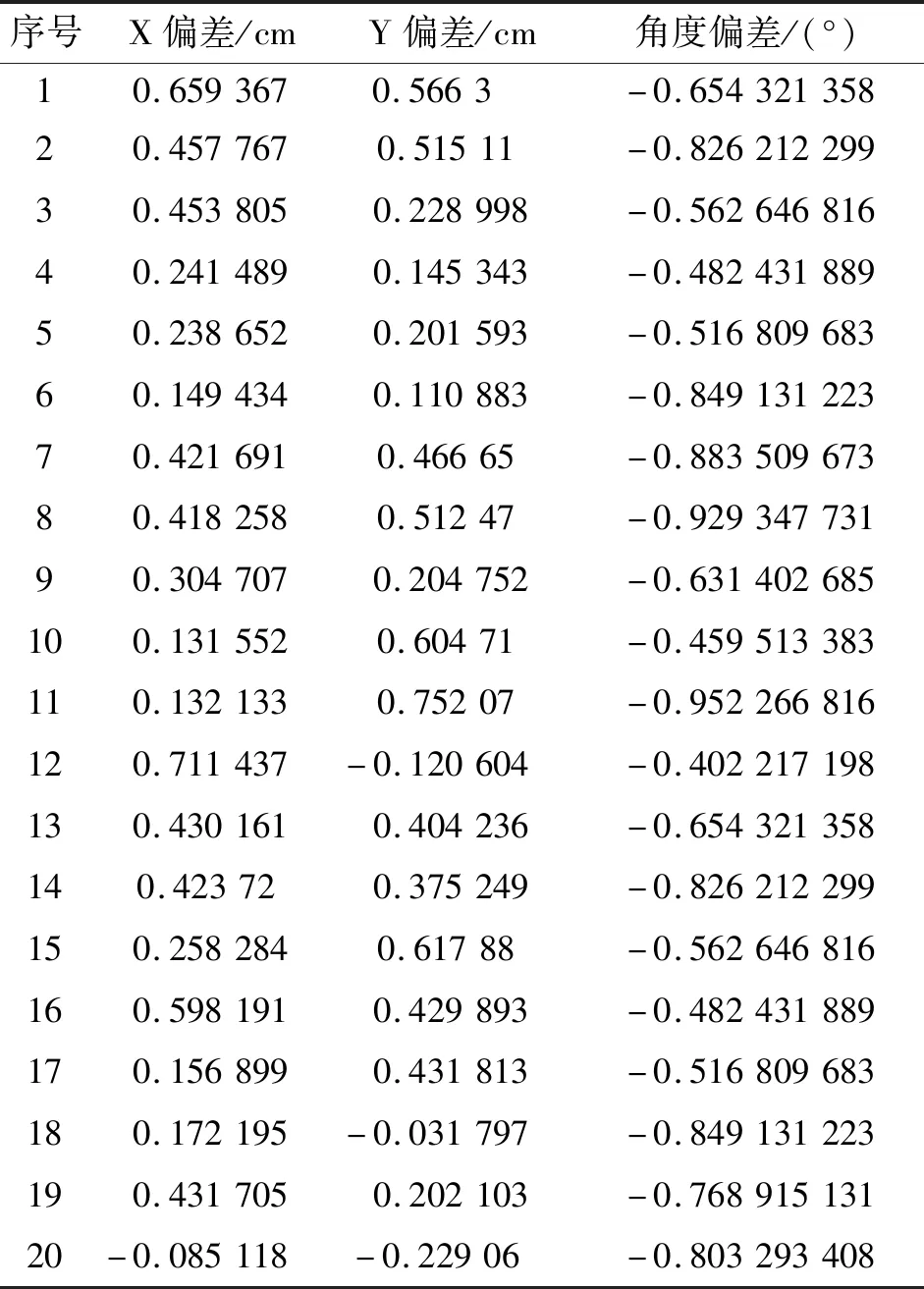
表5 同一定位点测量
综上,所提视觉辅助定位方法的定位精度小于±1 cm、角度精度小于±1°。与激光SLAM定位方法相比,定位精度提高了80%。经现场应用,满足了配电变压器检测试验的机器人巡视要求。
4 结 语
针对定位精度要求高的电力作业环境,提出了一种自主导航与视觉辅助定位融合方法。在激光SLAM导航基础上,通过机器人实时采集图像与预置位图像模板的比对分析,得到机器人定位误差,从而完成机器人定位校准。实验室应用结果表明,通过SLAM算法与视觉定位方法的融合,能够有效提高机器人定位精度。
下一步的工作,是进一步研究如何结合视觉图像的识别结果,提升电力机器人对动态环境下障碍物的判别能力和导航有效性。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
发明与创新(2021年39期)2021-11-05
导航定位学报(2021年4期)2021-08-29
数字海洋与水下攻防(2020年5期)2021-01-04
数字海洋与水下攻防(2020年1期)2020-04-20
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
中学数学杂志(初中版)(2017年4期)2017-08-28
电子制作(2017年19期)2017-02-02
汽车文摘(2015年11期)2015-12-02