基于WSN的设施农业智能移动监控系统研制
2020-07-15 05:01梁裕巧李洪兵康云川刘子路陈立万
计算机技术与发展 2020年7期
梁裕巧,李洪兵*,罗 洋,康云川,刘 莎,刘子路,陈立万
(1.智能信息处理与控制重庆高校市级重点实验室,重庆 404120;2.物联网与智能控制技术重庆市工程研究中心,重庆 404120;3.三峡库区地质环境监测与灾害预警协同创新分中心,重庆 404120)
0 引 言
在信息化发展飞速的时代,传统的农业已经与这个社会不相匹配,且落后于其他产业。而中国的农业必须从传统农业的实践方式逐步升级到以产业化、信息化为指导的智慧农业管理方式[1]。中国的自然灾害相对比较频繁,灾害的发生尤其对农民的影响特别大,外部环境因素具有很大的不可预测性。设施农业智能移动监控系统能够在可控的情况下对农作物进行生产监控,有效防止自然灾害、土质情况、病虫的控制等。设施农业移动监控系统主要是以ZigBee通信技术、物联网传感器技术等进行开发。
随着农业物联网的诞生,ZigBee无线通信技术应用到智能农业监控已经成为必然趋势[2-7]。它是基于IEEE.802.15.4标准的低功耗局域网协议,ZigBee协议栈是建立在IEEE.802.15.4的PHY层和MAC子层规范之上,无线通信频段设置为2.4 GHz。与其他无线网络相比,它具有低功耗、低成本、自组织、稳定性强等特点。因此,本系统采用有高达256 KB的闪存和20 KB的擦除周期以支持无限更新和大型应用程序,8 KB的RAM适用于复杂的ZigBee应用的CC2530为主芯片。在掉电模式下,当睡眠定时器运行时电流损耗不到1 μA,还具有强大的地址识别和数据包处理等功能[3-15]。
通过终端传感器进行数据采集,协调器将采集的信息通过WIFI网关传输到PC端和手机端,对数据进行分析处理,实现设施农业智能管理和移动监控。对农作物生长进行实时精准感知,及时反馈作物信息,提高相关人员的决策能力,并且降低生产成本,节约资源。
1 系统总体设计
1.1 系统组成
设施农业智能移动监控系统以CC2530为核心控制器,结合ZigBee无线传感器网络移动监控设施农业的系统开发。系统主体构架分为监控终端节点、ZigBee转WIFI网关、PC端和手机端四部分。其中监控终端节点分为4个移动节点,每个节点分别搭载不同类型的传感设备,监控终端节点1搭载了空气温湿度传感器、光照传感器、蜂鸣器、继电器和光照灯;监控终端节点2搭载了土壤湿度传感器、土壤PH值传感器、继电器控制和水泵;监控终端节点3搭载了土壤硝酸根离子类传感器、叶面湿度传感器、土壤金属类传感器;监控终端节点4搭载了烟雾传感器和卷帘电机。
1.2 系统功能
将监控终端节点采集的信息通过ZigBee无线组网传输到协调器,协调器通过ZigBee传输链路将信息传输到ZigBee转WIFI网关,而PC端和手机端通过WIFI传输链路连接网关的IP地址,实现对设施农业智能监控。当空气温湿度超过预设值,蜂鸣器自动报警,主控芯片给继电器发送控制信号,打开排风扇;当土壤湿度过低时,主控芯片也给发送控制信号,打开水泵,实现灌溉;当光照强度不足时,可以通过PC端和手机端控制光照强度,也可以控制卷帘电机。系统总体结构框图如图1所示。
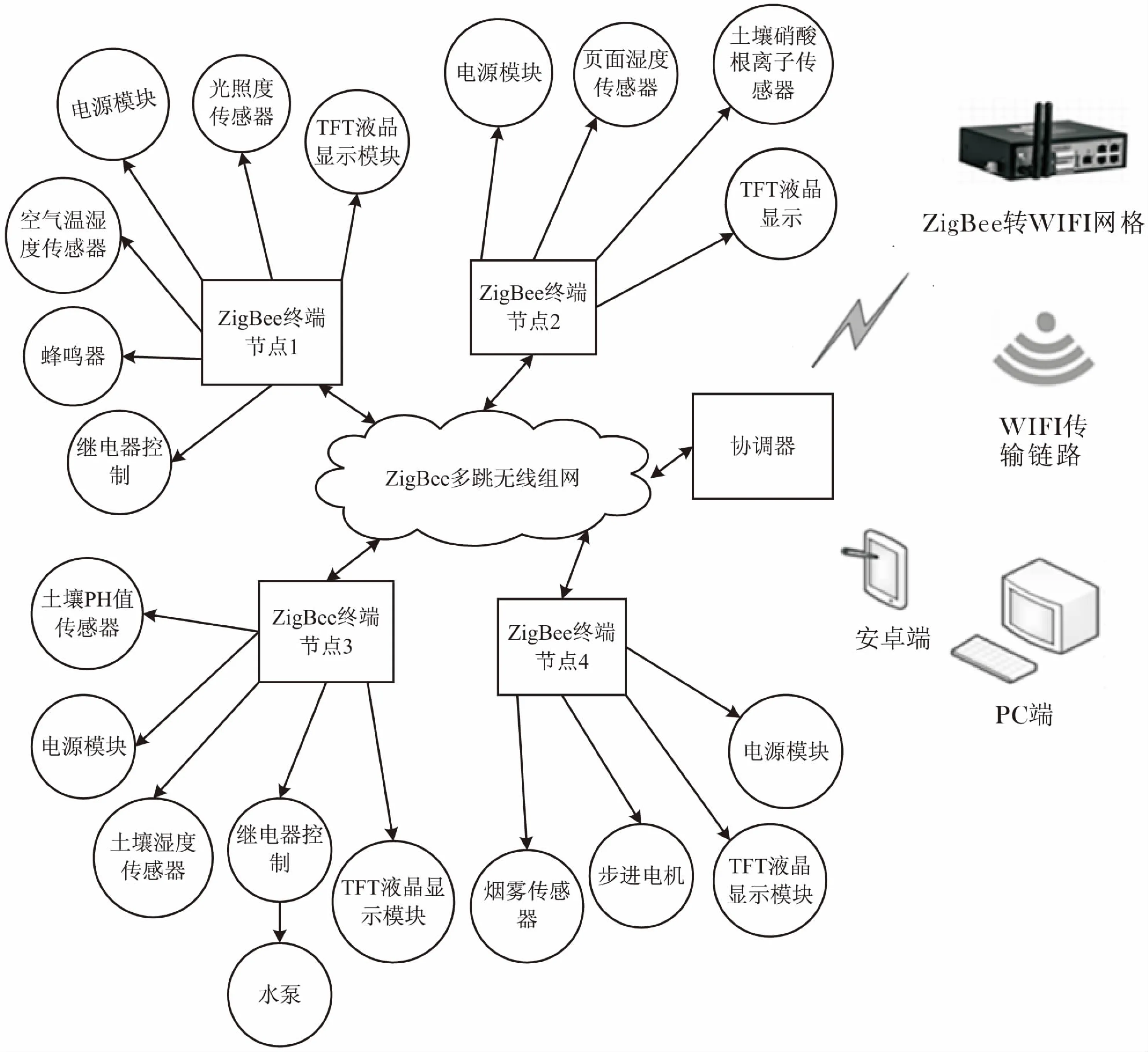
图1 系统总体结构框图
2 系统硬件设计
在ZigBee网络下的设施农业智能移动监控系统的硬件设计采用Altium Designer 14软件绘制CC2530主板核心的原理图,然后导入绘制PCB图,最后印刷成电路板。本系统硬件主要包括四个ZigBee终端节点、一个协调器节点和ZigBee转WIFI网关。终端节点和协调器是由CC2530最小系统、TFT液晶显示屏、串口通讯模块、电源模块组成。ZigBee转WIFI网关主控芯片采用RT5350设计。
2.1 无线传感器选择
温湿度传感器采用DHT11传感器,它是温湿度集于一身的复合型传感器,采用专用的数字模块采集技术和温湿度传感技术,传感器内部由一个电阻式感应湿度元件和测量温度元件组成,恶劣环境下具有极高的可靠性和长期的稳定性。DHT11传感器具有响应快、抗干扰能力强、功耗低、体积小等特点。DHT11传感器工作电压为3.3 V~5.5 V,一般为4针单排引脚封装,连接简单。
烟雾传感器型号为MQ-2,具有电源指示和TTL信号输出指示,具有DO开关信号(TTL)输出和AO模拟信号输出。本系统设计采用的是DO开关信号输出模式,TTL输出有效信号为低电平,具有长期的使用寿命和可靠的稳定性,响应恢复特性快,输入电源5V-DC,功耗为150 mA。
土壤湿度传感器采用Moisture Sensor,工作电压为2.0 V~5.0 V,采用叉形设计,方便插入土壤,检测深度为38 mm,输出电压随着土壤湿度升高而增大。土壤PH值传感器型号为HAD-TPH,采用了国际固体电解质和大面积四氟乙烯结界,不易堵塞免于维护,HAD-TPH的测量范围为0 pH~14 pH,准确度为±0.1 pH,分辨率为0.01 pH,采用12V-DC供电,可使信号输出长度达20米以上无干扰,具有低成本、高性能、体积小、功耗低、集成度高等特点,支持二次开发,广泛用于农业灌溉、土壤速测、科学试验等。
2.2 CC2530主控芯片配置
CC2530是前Chipcon公司推出基于IEEE 802.15.4、ZigBee和RF4CE的片上系统(SOC)。此次系统CC2530芯片选用CC2530F256版本,内置集成业界领先的2.4 GHz的RF收发器,并与增强型的8051MCU相结合。具有可编程的256字节闪存、8 KB RAM和两个UART接口和可复用的SPI接口、8通道可配置分辨率12的ADC和21个GPIO等。
2.3 串口通讯模块
数据通讯时,可以根据CPU的连线结构和数据传送方式不同分为并行通信和串行通信。并行通信是指数据发送和接收时,每个数据单独用一根导线进行同时传送,速度快,效率高但是成本也高,容易受干扰;串行通信是指按顺序一位一位进行数据发送和接收,只需要一根导线即可,传送数据慢,但成本低,易于较长距离的数据传送。串行通信又分为同步和异步两种方式。CC2530内有两个串行通信接口USART1和USART2,能够分别运用于异步USART模式或者同步SPI模式,两个USART具有相同功能并可以设置独立的I/O引脚。协调器节点上的串口通信电路采用CH340G芯片实现USB转串口电路,CH340G可以提供串口全双工异步通信与USB接口相连接的解决方案。
3 系统软件设计
本系统以IAR Embedded Workbench V8.13作为开发平台,基于TI公司的ZStack-2.5.1a协议栈进行设计。软件设计主要包括终端传感器数据采集程序、阀门控制程序、协调器节点流程设计、上位机监控管理软件设计。系统上电工作时,先设置PC机和协调器和终端节点的连接串口号,比特率设置为115 200 Hz;然后协调器进行组建ZigBee网络,等待终端节点申请加入组网;组网成功后终端采集数据,并将采集的数据发送给协调器。系统总体工作流程如图2所示。
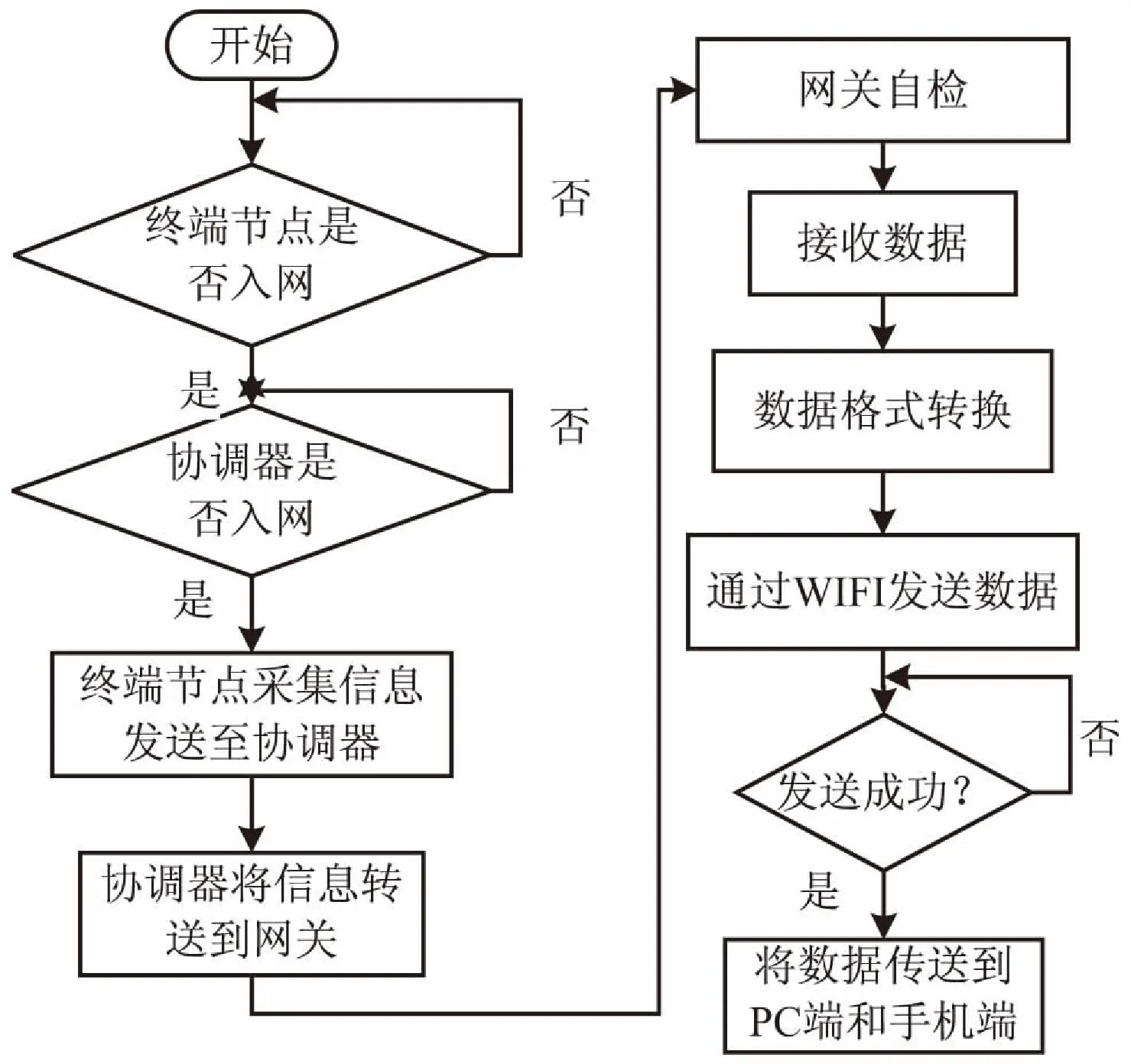
图2 系统总体工作流程
3.1 协调器节点软件设计
协调器在ZigBee网络中拥有最高的权限,节点可以有多个,但协调器在整个网络中只有一个。协调器的主要作用是维护整个网络保持整个设备的通信,对整个系统实施管理和监控,还可以对整个网络进行安全加密。当有终端节点申请加入组网时,协调器会给终端节点配置16位短地址且允许加入网络。协调器入网流程如图3所示。
3.2 终端节点软件设计
终端节点上连接各种传感器设备,当一些节点在没有用到时都处于睡眠模式,需要用到时节点被唤醒,所以只需用一节电池供电即可,并且存储空间(RAM)较小。主要功能是将传感器采集的数据显示出来,终端节点主要负责与协调器节点进行通讯,终端节点开始初始化,并向协调器节点发送一个加入网络的申请,终端节点介绍协调器16位网路短地址,并采集数据发送给协调器。终端节点入网流程如图4所示。
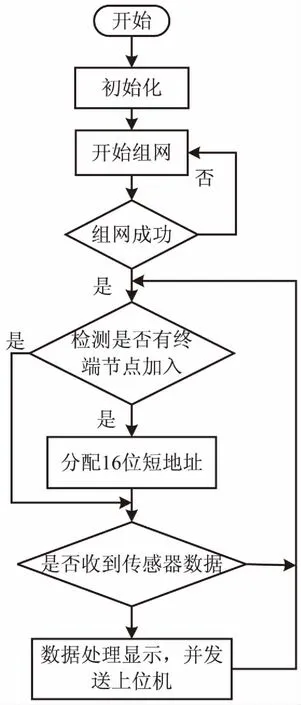
图3 协调器入网流程
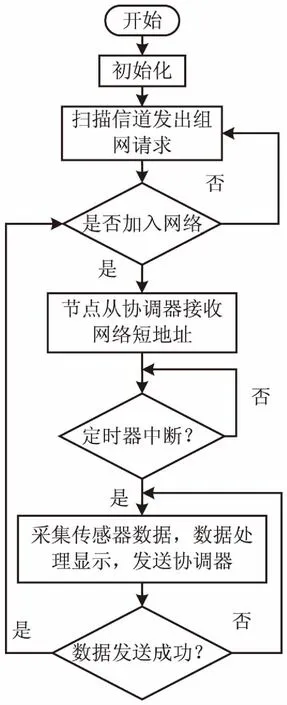
图4 终端节点入网流程
3.3 PC端监控软件设计
上位机管理平台的主要功能是对终端各个节点采集的数据通过协调器发送到PC端实施管理及监控。上位机的监控界面采用Microsoft Visual Studio 2017软件进行开发设计。
打开上位机界面,开始执行程序时,首先进行串口设置,实现管理和监控终端采集的数据信息。如果有异常情况,上位机的显示部分会亮红并给发送一个信息通过蜂鸣器实现警报处理。
3.4 ZigBee与WIFI网关设计
通过分析ZigBee与WIFI协议,文中采用双模无线网关设计。ZigBee转WIFI网关主控芯片采用RT5350,内部集成了基带处理器、射频放大器、高性能的CPU内核、一个拥有五端口的百兆以太网交换机。它没有很多的外围电路,就可以实现无线传输,并提供更大的覆盖范围和更高的无线吞吐量。在ZigBee自定义通信协议帧基础上设计Linux和CC2530串口传输协议,设计总体分为通信模型建立、协议解析和转换、验证三个部分。
4 智能移动监控设计
对于错综复杂的农田环境,如果只对设施农田部分点进行数据采集监控则不够全面,不能完全实时监控整个设施农田的信息。本次研究考虑对终端节点的移动性,采用智能小车进行自动循迹移动采集信息,并将各个传感器安装在智能小车上,实现不间断或定时移动采集监控农作物信息。智能小车采用STM32为主控芯片,通过PC和手机端控制智能小车在设施农田中自动寻轨、测距、避障和采集信息等。
智能小车电机驱动模块采用BTN7960芯片构成集成双H桥驱动电路;循迹检测利用红外传感器对设施农田铺好的黑色轨迹的反射系数不同扫描I/O口,检测到I/O有信号输出判断处理,完成小车自动循迹功能;本次无线传输通信同样采用2.4 GHz的ZigBee技术;舵机速度采用PWM脉宽调制技术,控制舵机的转向和速度。
根据PID增量式控制算法对智能小车舵机的转角和速度进行调整。增量式PID控制算法如图5所示。

图5 PID增量式算法简化图
PID控制器基本微分方程为:
(1)
由式(1)得到控制器第k-1个采样时刻输出值:
(2)
将式(1)与式(2)相减整理得到增量式PID控制算法公式:

Aek+Bek-1+Cek-2
(3)
从式(3)中可以得到:
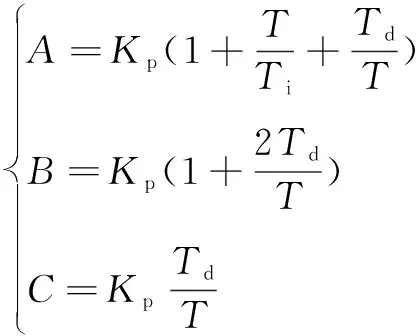
(4)
其中,uk为控制器输出值,ek为控制器输入与设定值之间的误差,Kp为比例系数,Ti为积分时间常数,Td为微分时间常数,T为调节周期。
5 系统性能测试
对各个模块经过一系列测试,该系统能够通过ZigBee组网正常地收发数据,数据能在TFT液晶显示屏中正常显示,智能小车能在预定收发范围内正常循迹、避障和采集监控信息。
在室外空旷的场景下测试,网络传输范围在100 m左右,通过了测试并且无丢包现象。终端节点和协调器节点的耗能小,且工作时长达半年左右。该系统实现了低功耗传输,稳定性能好,成本低。系统测试结果如表1所示。
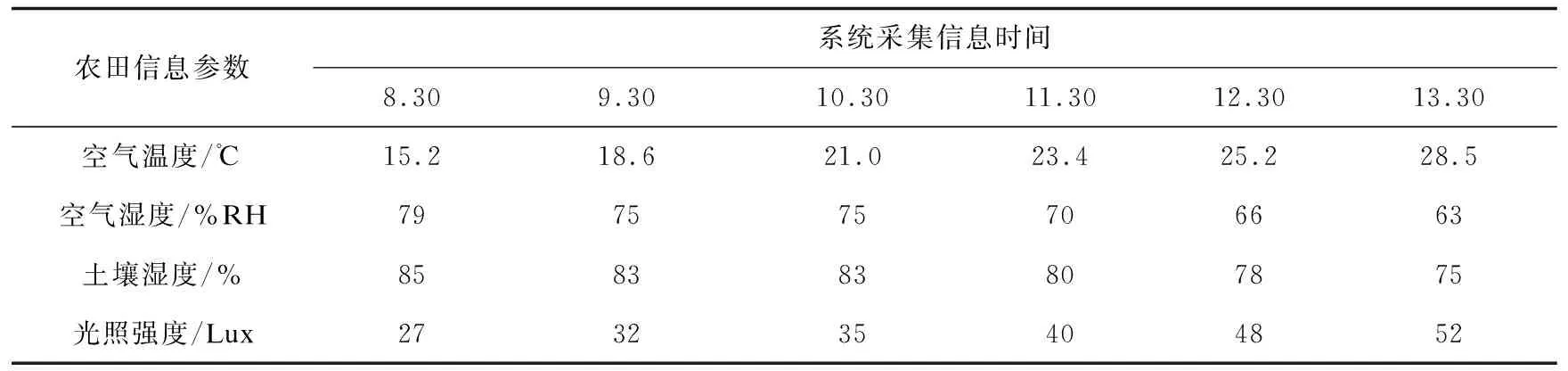
表1 系统测试结果
6 结束语
该系统是以CC2530为主芯片基于ZigBee无线网络进行传输,以智能小车移动实时监测农田环境信息。实现对设施农业进行智能移动监控的作用,为传统农业向现代化、信息化、智能化发展提供重要的基础。农业智能移动监控能有效解决传统管理监测系统的布线复杂问题。该系统是通过ZigBee无线网络组网进行数据传输,系统具有模块化、功耗低、性能好、可扩展性强等特点,能最大化降低农业应用的成本。
猜你喜欢
小猕猴智力画刊(2022年9期)2022-11-04
导航定位学报(2022年4期)2022-08-15
煤气与热力(2022年4期)2022-05-23
计算机应用文摘·触控(2022年6期)2022-04-15
现代电子技术(2022年4期)2022-02-21
中兴通讯技术(2021年5期)2021-11-25
北京航空航天大学学报(2021年9期)2021-11-02
计算机应用与软件(2021年10期)2021-10-15
电子制作(2021年4期)2021-06-16
华东师范大学学报(自然科学版)(2019年3期)2019-06-24