
基于信噪比估计的无人机频谱感知算法
2020-07-14 08:35张曾邓小芳
现代电子技术 2020年10期
张曾 邓小芳


摘 要: 无人机外出执行任务的过程中,有效的频谱感知能力能适应多种复杂的电磁环境,提高无人机的生存能力从而保障任务的顺利执行。根据实际应用情况,提出一种基于信噪比估计的无人机频谱感知算法。该算法首先对信噪比环境进行估计,然后选择更合适的基础感知算法,保障在低信噪比环境下的检测性能。仿真结果表明,该算法在低信噪比环境下较传统感知算法提高了检测性能,达到了在降低算法复杂度的同时,提高频谱利用率的目的。
关键词: 无人机; 频谱感知; 信噪比估计; 性能检测; 阈值调整; 仿真分析
中圖分类号: TN781?34 文献标识码: A 文章编号: 1004?373X(2020)10?0119?05
UAV spectrum sensing algorithm based on signal?to?noise ratio estimation
ZHANG Zeng, DENG Xiaofang
(Key Laboratory of Cognitive Radio and Information Processing, Ministry of Education, Guilin University of Electronic Technology, Guilin 541000, China)
Abstract: In the process of UAV going out to perform tasks, the effective spectrum sensing ability can adapt to a variety of complex electromagnetic environment and improve the UAV viability to ensure the smooth execution of tasks. A UAV spectrum sensing algorithm based on SNR (signal?to?noise ratio) estimation is proposed according to the practical application situation. In the algorithm, the SNR environment is estimated, and then the more appropriate basic sensing algorithm is selected to ensure the detection performance in the low SNR environment. The simulation results show that, in comparison with the traditional sensing algorithm, this algorithm improves the detection performance in the low SNR environment, reduces the complexity of the algorithm, and achieves the purpose of improving the spectrum utilization.
Keywords: UAV; spectrum sensing; signal?to?noise ratio estimation; performance detection; threshold adjustment; simulated analysis
0 引 言
经过多年的发展,无人机在应急救灾、森林防火、环境监测、科研试验等生产、生活领域发挥着重要的作用。现代信息条件下电磁环境极为复杂,无人机的数量也不断增加,使得战略频谱资源显得愈加紧张。在障碍物众多、地形复杂的恶劣环境中执行任务时,保证单机尤其是关键节点持续执行任务能力极为重要,急需提高无人机对空闲频段的发现和利用能力 [1]。
1999年,Mitola提出的认知无线电技术是缓解当前频谱资源利用率低下问题的关键技术。认知无线电技术的核心技术之一是频谱感知,其核心思想是认知用户感知周围无线环境,及时发现已分配给授权用户而又未被占据使用的闲置频段,是实现频谱资源共享的重要前提。在频谱感知的研究中,国内外学者作了大量的基础理论研究,首先,为了提高频谱利用率,尽量使检测时间缩短,获取更多时间传输数据;其次,面临不同的无线环境,要能拥有较宽的动态检测范围和感知灵敏度;此外,在进行动态感知的过程中不能对授权用户产生有害干扰。经过数年的研究,感知技术多集中于对授权用户发射机信号检测的相关研究,其主要基本检测算法有能量检测、匹配滤波器检测、循环平稳特征检测及协方差盲检测[2]。其中能量检测不需要主用户先验信息,感知时间短,算法复杂度低而广泛应用,但在低信噪比环境下检测性能会急剧下降,无法正确感知区分授权信号和噪声信号。匹配滤波器检测能获得理想的检测性能,但是需要主用户的先验信息为基础,需要时间和载波的严格同步来获取检测增益,实施起来较为困难,应用较少。循环平稳特征检测和协方差盲检测在低噪环境下有较好的抗干扰和检测性能,但是算法复杂度高,一定程度上降低了检测效率。频谱感知算法当前研究多集中在合作感知方向上,但针对无人机特定场景下的应用,单节点即单机频谱感知算法的改善同样重要,对于无人机自主生存能力的提高有着重大的意义。文献[3]提出基于噪声方差估计的自适应多门限能量检测算法,较为精确地估计噪声方差不确定区间,从而自适应地设定多判决门限,但其始终基于能量检测方法,试图逼近理论检测性能,在低信噪比环境下的检测性能依然较差。文献[4?5]提出以基于无人机协作频谱感知为思路,进行门限调整的能量检测为基础,融合判决,一定程度上提高了检测概率,但是仍然在低噪环境下表现不佳,同时无人机之间的大量通信还是会增加额外的带宽开销。为改善单节点频谱感知性能,文献[6]提出的两步感知算法可以提高检测性能,先采用高效率的能量检测,再使用循环平稳特征检测进行二次判定,确保检测性能,但是一定程度上降低了感知效率,提高了算法复杂度。
本文研究旨在提高无人机单节点频谱感知能力,主要在不同信噪比条件下,选取更优的感知方法,达到增强频谱检测性能的目的。通过对环境信噪比条件进行估计,同一感知周期内选择更合适的检测算法,降低算法复杂度提高检测性能。
1 基于信噪比估计的无人机频谱感知算法原理与分析
1.1 频谱感知基本检测模型
无人机数量的不断增长,外出执行任务通常是以群体为单位,机群内包括指挥节点和非指挥节点。指挥节点可以將现场环境动态情况及时传递,非指挥节点主要负责任务的执行。整个机群大范围的覆盖,很好地形成对现场各区域频谱使用情况实时感知,并将信息共享。现场基本组成单位如图1所示。
在实际应用中,存在不确定因素的影响,根据授权频段是否被授权用户占据,所以频谱感知模型可以假设一个二元检验[7]:
[r(t)=gs(t)+ζn(t),H1ζn(t),H0] (1)
式中:[g]为衰落信道的幅度增益;[ζ]为噪声不确定性的参数;[s(t)]为接收信号;[n(t)]表示均值为0的加性高斯白噪声;[H1]表示频段被授权用户占用,认知用户不可以接入;[H0]表示频段授权用户未占用,认知用户经过允许可以接入暂时使用。在衡量检测性能时,以虚警概率[Pf]和检测概率[Pd]为主,若[Pf]过高会损失一定的频谱接入机会,所以在一定[Pf]条件约束下要尽量提高[Pd]。
1.2 基于信噪比估计的感知流程
信噪比是反映信道状态的重要参数,在能量检测算法中,在较低的信噪比环境下,检测性能会急剧下降。为了提高在低信噪比环境下的检测性能,可以采用循环平稳特征检测的检测算法,而采用该算法的同时,提高了整体算法复杂度,一定程度上影响检测效率。所以通过对信噪比环境的估计,将二者方法的优点进行结合,在不同的信噪比环境下选择更合适的感知算法,可以实现在降低算法复杂度的基础上,提高在低信噪比环境下的检测性能。
进行信噪比估计首先计算待检信号与噪声采样点的能量均值之比[8]:
[ESNR=PSPW=1Nn=1Ny(n)21Nn=1Nw(n)2] (2)
式中:[PS]为估计的待检信号功率;[PW]为噪声功率;[N]为采样点数。将式(2)结果转换为以分贝([dB])为单位的信噪比[S]:
[S=ESNR|dB=10·log1Nn=1Ny(n)21Nn=1Nw(n)2] (3)
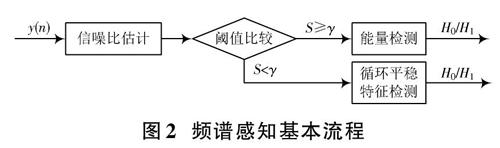
将估计的结果与设定信噪比选择阈值[γ]相比较,从而选择更合适的检测方法。根据信噪比估计情况,若[S≥γ],说明信道条件较好,选择能量检测的方法,快速获得检测结果;若[S<γ],说明信道环境较为恶劣,选择循环平稳特征检测法,提高低信噪比条件下的检测准确度。基本频谱感知流程如图2所示。
在一个感知周期中,系统根据信噪比估计结果,与设定的阈值进行比较,继而选择更合适的检测算法,相比于两步检测,降低了检测算法的平均复杂度。在单次检测周期内衡量检测性能时虚警概率和检测概率就是选择当次算法的虚警概率和检测概率。
1.3 能量检测法
能量检测法是一种次优检测法,通过对接收信号总能量来判断授权信号是否存在,或者只存在噪声信号。能量检测法是一种非相干检测且感知时间较短,但噪声的不确定性会对检测性能产生严重影响。检测周期内将特定时间内的接收信号在频域内实现快速傅里叶变换,获得的累计能量作为检验统计量,并与判决门限比较得到感知结果[9]。能量检测流程如图3所示。
接收信号[y(t)]采样后得到[y(n)],经过快速傅里叶变换、平方求和及取均值,然后构建判决统计量[X=1Nn=1Ny(n)2],将统计量与判决门限[λ]进行比较,当[X≤λ]时,表示授权用户未占据频段,判决结果为[H0];当[X>λ]时,则表示授权用户存在,频段不可被占用,判决结果为[H1]。文献[10]指出,判决统计量服从卡方分布,即:
[X~χ2N,H0χ2N(2γ),H1] (4)
式中,[γ]为用户接收信号的信噪比。根据中心极限定理,当采样点数[N]远大于1时,[X]近似服从高斯分布:
[X~Nδ2w,2Nδ4w,H0Nδ2w+δ2x,2N(δ2w+δ2x)2,H1] (5)
则可以推导出能量检测的虚警概率[PEf]和检测概率[PEd]分别为:
[PEf=PX>λ|H0=Qλ-Nδ2w2Nδ4w] (6)
[PEd=PX>λ|H1=Qλ-N(δ2x+δ2w)2N(δ2x+δ2w)2] (7)
式中:[δ2x]为信号功率;[Q(x)=x+∞12πexp-t22dt],为标准高斯互补积分函数;[δ2w]为噪声功率。依据设定的目标虚警概率[PEf],可以推导出判决门限为:
[λ=Q-1(PEf)·2Nδ4w+Nδ2w] (8)
式中,[Q-1(x)]为逆函数。由式(8)可知,判决门限主要受信道噪声功率的影响,进而影响不同信噪比条件下的检测概率。
1.4 循环平稳特征检测
循环平稳特征检测是利用谱相关函数检测信号中的周期特征来判断授权用户是否存在 [11]。其检测原理是授权信号一般会经过调制、编码等处理,而后会进行接收机解调、解码的过程,整个过程中信号的传输会伴随冗余信息,所以与其相关的均值、自相关函数都会存在周期性,而噪声信号不存在这些特性。循环平稳特征检测流程如图4所示。
构建的谱相关函数[Sαx(f)]的表达式为:
[Sαx(f)=limT→∞limΔt→∞1Δt-Δt2Δt21TFT(t,f+α2)? FT·(t,f+α2)dt] (9)
式中:[α]为引入循环频率;[FT]定义为:
[FT(t,v)=t-T2t+T2X(u)e-j2πvudu] (10)
[Sαx(f)]会在不同的频率[f]与循环频率[α]处出现峰值,噪声不具备循环特性,所以只在[α=0 Hz]处出现峰值,也就是说通过峰值位置来判断是否存在授权信号。但是检测方法还存在一定的缺陷,在信噪比环境极其恶劣的条件下,峰值位置的判断是模糊的,峰值断定缺乏量化,进而有研究解决了这个问题,通过计算频谱相关系数构建判决统计量 [12],如下:
[Cαx=Sax(f)[S(f+α2)S(f-α2)]12] (11)
因此,当检测循环频率不等于零时,根据信号的循环谱峰值位置出现在不同位置判断授权用户是否存在,即判决准则如下:
[Cax(f)=Sas(f),H10,H0] (12)
式中,[Sas(f)]为授权调制信号的循环谱密度函数。设置判决门限[λ],当[Sas(f)>λ]时,说明主用户存在;当[Sas(f)≤λ]时,说明主用户不存在。则可以推导出虚警概率和检测概率分别为:
[Pcf=P(Sas(f)>λ|H0)Pcd=P(Sas(f)>λ|H1)] (13)
頻谱相关系数具有归一化的形式,检测门限设定在仅噪声存在的条件下,判决门限为:
[λ=max(I(α))α=0NI2(α)N] (14)
式中,[I(α)?maxfCαx(f)]。
1.5 信噪比选择阈值调整
信道条件较好的环境下,感知周期内多采用能量检测法,快速获得感知结果,信道条件恶劣的环境下,采用循环平稳特征检测法。
当设定期望检测概率[Pd],而系统检测概率比期望值低的时候,需要调整信噪比阈值,多采用循环平稳特征检测的方法。相反,当检测概率大于或等于期望概率时,说明信道条件较好,可以多采用能量检测方法,加快感知速度,提高检测效率。为此,设定阈值调整:
[γi=γi-1+ξ(Pd-Pd)] (15)
式中:[γi-1]为第[i-1]次检测的信噪比阈值;[ξ]为调整因子,[ξ>0],[ξ]设定值越小,选择阈值调整更小,可以找到最合适的选择阈值。当对比检测概率[Pd]和期望检测概率[Pd]时,若[Pd-Pd>0],则说明信道条件较预期差,应该提高选择阈值,即增加[γi],可以提高循环平稳特征检测使用概率;若[Pd-Pd<0],则说明信道噪声条件较预期好,可以适当降低选择阈值,即减少[γi],可以提高能量检测法的使用概率,从而提高检测效率。
2 算法流程
根据上文描述,可以归纳本文算法流程,其中单周期检测流程图如图5所示。
信噪比阈值调整流程图如图6所示。
3 仿真分析
将每架无人机视为单个认知用户节点,验证算法的可行性。将仿真结果与两步检测和能量检测做了对比,Matlab仿真设置信噪比区间[SNR∈[-20,5]dB],设定初始信噪比选择阈值为[-8 dB],期望检测概率[Pd=0.9],信噪比调节因子[ξ=10]。当虚警概率设定[Pf=0.03]时,三种检测算法的随信噪比变化的检测概率对比如图7所示。
由图7可见,三种方法都受信噪比环境影响,其中能量检测影响最大,在低信噪比状态下的检测性能最差,两步检测方法在低信噪比下检测性能要优于能量检测;但本文所提的方法检测概率要高于另外两种方法,说明基于信噪比估计选择更适合检测算法的思路,有更好的信噪比环境适应能力,保证了系统的检测性能不会急剧下降。
图8表示在[SNR=-12 dB]时,系统检测概率随虚警概率的变化曲线。由图可知,在设定虚警概率一定的条件下,本文所提的感知算法的检测概率表现要好于另外两种方法,在低信噪比环境下表现出更好的检测性能。
4 结 语
无人机外出执行任务期间,为了提高频谱空穴的发现和利用能力,保障任务的顺利执行,提出基于信噪比估计的无人机频谱感知算法。无人机在面临复杂电磁环境下,首先进行现场信噪比估计,然后选择更合适的频谱感知方法,在降低一定算法复杂度同时保证在低信噪比环境下的感知性能。仿真结果表明,在低信噪比环境下无人机作为单个认知节点采用本文所提算法有着更好的检测性能。未来无人机频谱感知的研究,在改善单机节点检测性能的基础上,可以进一步提高联合检测性能,依据无人机组网架构,提出更有效的感知算法。
参考文献
[1] 薛楠.如何破解无人机大发展时代频谱短缺之忧?[J].上海信息化,2015(11):16?19.
[2] CHEN K C, PRASAD R. Cognitive radio networks [J]. IEEE signal processing magazine, 2013, 10(8): 11?15.
[3] 文凯,姜赖赢.一种基于噪声方差估计的自适应多门限能量检测算法[J].南京邮电大学学报(自然科学版),2017,37(3):68?72.
[4] 邴雨晨,刘红,杨建波,等.一种空中联合作战频谱感知方法[J].电讯技术,2014,54(10):1372?1377.
[5] 郝博雅,周辉,孙斌.双机协作的频谱感知算法[J].四川兵工学报,2012,33(2):114?116.
[6] MALEKI S, PANDHARIPANDE A, LEUS G. Two?stage spectrum sensing for cognitive radios [C]// 2010 IEEE International Conference on Acoustics, Speech and Signal Processing. Dallas: IEEE, 2010: 2946?2949.
[7] BAGWARI A, KANTI J, TOMAR G S, et al. A robust detector using SNR with adaptive threshold scheme in cognitive radio networks [J]. International journal of signal processing, image processing and pattern recognition, 2016, 9(5): 173?186.
[8] SRISOMBOON K, THAKULSUKANANT K, PRAYOTE A, et al. Adaptive two?stage spectrum sensing under noise uncertainty in cognitive radio networks [J]. IEICE transaction on fundamentals of electronics communications & computer sciences, 2016, 14(1): 21?35.
[9] VIEN Q T, NGUYEN H X, TRESTIAN R, et al. A hybrid double?threshold based cooperative spectrum sensing over fading channels [J]. IEEE transactions on wireless communications, 2016, 15(3): 1821?1834.
[10] LIU Xin, GUAN Mingxiang, ZHANG Xueyan, et al. Spectrum sensing optimization in an UAV?based cognitive radio [J]. IEEE access, 2018(6): 44002?44009.
[11] ZHANG Shibing, BAO Zhihua. An adaptive spectrum sensing algorithm under noise uncertainty [C]// IEEE Intenational Conference on Communication. Kyoto: IEEE, 2011: 1?5.
[12] HE Xinying, ZENG Zhimin, GUO Cali. Signal classification based on cyclostationary spectral analysis and HMM/SVM in cocnitive radio [C]// 2009 International Conference on Measuring Technology and Mechatronics Automation. Zhangjiajie: IEEE, 2009: 14?17.
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
科技视界(2016年15期)2016-06-30
企业导报(2016年9期)2016-05-26
