
海上浮式风机混合模型试验系统开发
2020-07-11 14:41刘浩学温斌荣魏汉迪汪学锋彭志科田新亮
实验室研究与探索 2020年5期
刘浩学,温斌荣,魏汉迪,汪学锋,彭志科,田新亮
(上海交通大学a.海洋工程国家重点实验室;b.高新船舶与深海开发装备协同中心;c.机械系统与振动国家重点实验室,上海200240)
0 引 言
海上风能是一种清洁的可再生能源,其中高质量的风能资源主要集中在深海区域。当水深超过50 m时,海上浮式风机具有更好的经济性[1]。近年来,世界各研究机构和风电企业均加快了对海上浮式风机的研制。浮式风机同时经受风载荷、波浪载荷、流载荷和其他各种载荷的联合作用,掌握浮式风机在不同环境条件下的响应情况至关重要。数值仿真可以简洁、高效地求解浮式风机耦合动力学响应,但其计算结果的合理性和有效性仍然需要模型试验来进行验证[2]。水池模型试验是研究浮式风机动力性能的重要途径,然而,开展浮式风机的水池风浪联合模型试验存在以下困难和缺点:①浮式风机同时受到较大风载荷和波浪载荷的联合作用,在水池实验室难以同时高质量地重现两种载荷,降低了试验结果的准确性;② 进行缩尺试验时,雷诺数相似和弗劳德数相似不能同时实现,这将带来动力特性的不匹配[3];③ 随着对浮式风机控制策略、发电功率、叶片工作状态监测等研究的深入,需要部署更多的设备和线缆,然而水池模型试验缩比定律对风机的重量有着严格的要求[4];④ 水池试验需要耗费大量的物力、财力,经济性有待提高。
为克服浮式风机水池试验的局限性,近年来,一种新型的数值仿真和模型试验相结合的混合模型试验技术应运而生[5],该技术用物理模型模拟风力机气动响应,用数值模型计算浮体的水动力响应,进而将物理模型和数值仿真通过传感器、驱动器结合起来,实现浮式风机的半物理仿真试验。
Sauder等[6]实时采集水池浮式风机浮体的运动响应,并将其输入数值模型计算摇荡风机在风场中对浮体的作用力,然后通过施力机构对浮体施加相应气动作用力,来模拟风浪联合作用下浮式风机的浮体运动响应。Bayati 等[7]采用风机物理模型模拟气动特性,利用力传感器实时采集风机对浮体的作用力,并代入浮体运动方程计算浮体时域运动响应,将求解运动结果通过六自由度平台实现,研究浮式风机非定常气动特性。Hall等[8]在海工水池采用施力机构将风机气动力作用于浮体,进行了缩尺比为1∶50 的混合模型试验,并且对试验数据进行了公布,讨论了试验的精度和延迟情况。
本文开发了一套海上浮式风机的混合模型试验系统和设备,包括风机的物理模型、浮体运动的数值求解程序以及相关测量设备和驱动设备,并且论证了该系统的可行性,提出了进一步的优化方法。
1 混合模型试验基本原理
混合模型试验方法的基本思想为:采用物理模型和数值模型相结合的方式,进行实时的载荷测量、响应计算和运动执行[9],将在水池中进行的风浪流联合试验转移到陆地高质量风场中进行,如图1 所示。如图1(b)所示,系统主要由三部分组成:①风机物理模型,模拟浮式风机在复杂环境作用下的空气动力特性响应;②浮体数值模型,求解浮式平台-系泊系统在环境载荷作用下的水动力特性响应;③数据采集与控制系统,用于实现物理空间-数值空间的数据传输与浮体等效运动执行。

图1 浮式风机模型试验对比示意图
混合模型试验系统的具体工作原理见图1(b)和图2。将风机物理模型安装在一台6 自由度运动平台上,整个系统置于高质量风场中,在塔筒底部和6 自由度平台之间布置一个六分力传感器,以实时测量风机对浮体的作用力。将测量所得作用力经低通滤波、缩尺转换后输入浮体数值模型,作为外部激励力作用于浮体时域运动方程;在数值空间求解浮体的6 自由度运动响应;通过6 自由度平台实现浮体的运动模拟;在每一时间步内,不断采集数据、循环迭代求解、运动执行,实现海上浮式风机的风浪联合混合模型试验。

图2 混合模型试验原理
2 风机物理模型
风力机是浮式风机的主要工作部件,其发电质量与载荷特性关乎浮式风机系统的经济性与可行性[10]。精确还原真实浮式风机的气动载荷特性至关重要。本文以NREL 5 MW 参考风机为原型风机,依据弗劳德缩尺定律,设计、制造了一套缩尺风机模型,缩尺比λ=1∶50,如图3 所示。文献[11]中详细介绍了该风机模型的设计与开发过程。
风机叶片的轮廓参数参考NREL 5 MW风机叶片的公开数据,根据模型试验和加工工艺的要求对翼型和叶尖轮廓进行了修正处理。选取碳纤维加工中空结构的叶片,在准确还原叶片翼型形状及气动性能的同时,将叶片质量及惯量分布严格控制在缩尺定律的要求范围内。

图3 模型风机总装配、叶片和塔筒示意图
为了研究风轮与塔筒之间的相互作用,风机塔筒设计为圆锥形筒状结构,以真实还原大型现代风机发电机的塔筒结构,塔筒顶部与风机的机舱连接,底部通过六分力传感器与6 自由度平台相连。传感器、电动机等装置的电源线、信号线等线缆从塔筒内部穿过,以最大限度地减少线缆对风场的影响和线缆悬挂导致的刚度、阻尼干扰。
机舱是风力机工作系统的主要承载部件,采用高性能铝合金加工而成,在保证足够强度的同时,尽可能减小结构重量[12],见图4。机舱上搭载有完整的风机控制系统,包括变转速控制器、变桨距控制器、偏航控制器,可完整还原大型风机的状态控制与环境响应。此外,为监测风机系统的工作状态,模型风机上还搭载有完善的信号采集系统,可实现对风轮转速、气动扭矩、功率输出、叶片载荷、机舱负载等的实时监测,实现对模型风机全方位、多层次的状态监测。在传统的水池试验中,由于弗劳德缩尺定律对质量的严格限制,要布置如此繁多的信号采集与状态监测通道几无可能。
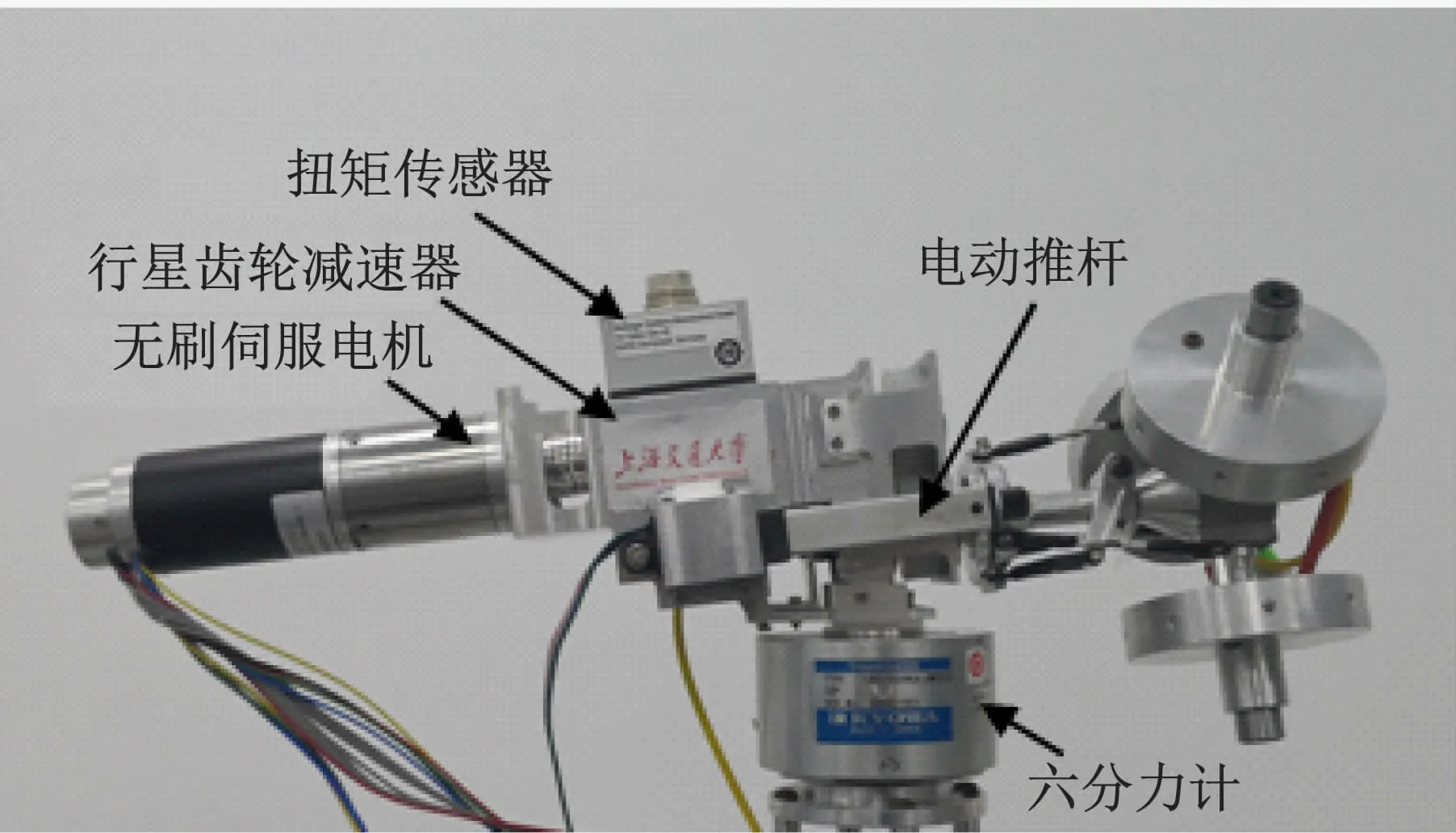
图4 模型风机机舱布置图
3 浮体数值模型与验证
3.1 浮体数值计算模型
浮式平台的水动力响应在数值计算模型中实现,浮式风机在风、浪等环境载荷作用下,浮体时域运动方程为
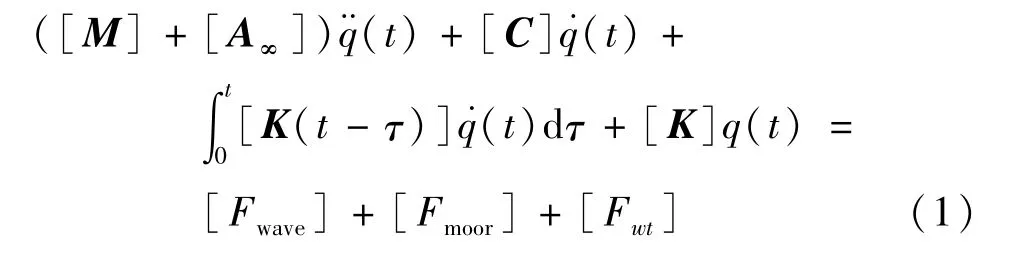
式中:M为实尺度浮式风机整体的质量矩阵;A∞为振动频率无穷大时的附加质量矩阵;C 为线性黏性阻尼矩阵;K 为刚度矩阵;Fwave为浮体所受到的波浪载荷;Fmoor为浮体受到的锚链力;Fwt为风机所受到的气动载荷;为卷积项,描述自由液面的记忆效应,即某时刻流体动量的变化会影响之后流体的运动;卷积项K(t)为时延函数[13]。
时域计算的对象为实尺度浮体模型。附加质量矩阵、阻尼矩阵、刚度矩阵以及幅频响应函数RAO 等水动力参数均由HydroD/Wadam频域计算得到。计算时忽略风机停机状态下空气对风机的作用,同时不考虑系泊系统的作用力,系泊系统的作用由程序施加。采用面元模型基于势流理论计算浮体的水动力参数,将计算所得参数的Wamit 文件提前加载于变量空间,利用查表的方式,实时计算实尺度浮式风机的6 自由度响应,提高程序计算效率。
波浪与浮体之间的相互作用一般考虑到二阶速度势,作用在浮体上的波浪激励力包括一阶波浪力和二阶波浪力。在本文的水动力计算中,只计入一阶波浪力,二阶的波浪力的影响较小予以忽略。此外,由于该试验系统对数值计算的求解速度要求较高,只考虑一阶波浪力降低了计算的复杂性,可有效加快计算速度。一阶波浪力根据提前加载的波浪时历文件和水动力参数文件计算所得。
应用悬链线模型计算锚链系统的回复力,考虑锚链的水中质量、轴向刚度和与海底的摩擦力,忽略锚链的弯曲刚度和阻尼。在时域水动力计算的过程中,根据各时间点浮体的位移和导缆孔的位置,计算相对于锚点的水平位移和垂直位移,结合锚链参数通过悬链线方程来计算锚链力。
时域方程中浮式风机塔筒和风轮受到的风载荷Fwt为实尺度浮体受到的作用力。本文提出的混合模型试验,为了更加全面地对风机进行监测和控制,专注风机气动力部分研究,将部署不同的采集和控制设备,会带来重量不相似的问题。为了解决该问题,风机部分的重力和惯性力在浮体时域方程中予以考虑。Fwt由安装在塔筒底部六分力传感器的测量值经过修正所得。
3.2 基于Matlab的数值求解程序及其验证
根据时域水动力方程和频域计算得到的浮体各项水动力参数、外载荷和运动状态,通过Matlab 采用四阶龙格库塔法,迭代计算时域方程的数值解,得到浮体的6 自由度响应情况[13]。

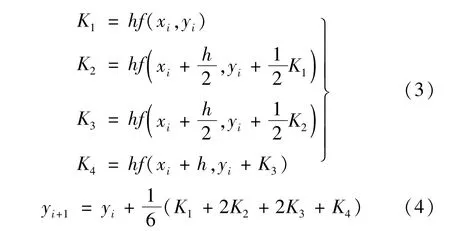
求解流程如图5 所示,首先设置浮体的质量、惯性半径、重心位置等参数,然后加载锚链参数文件、波浪环境和水动力参数等进行初始化,开始求解计算,将每一时间步的外载荷作用于动力学方程,并根据此时的位移情况求解出时间步长结束后的响应情况,由新的位移、速度计算下一时间步响应,如此循环往复,得到时域的运动响应。求解时间步长的选择与计算机的性能有关,时间步长越小运动越平滑准确,但是因采集设备、运动执行设备的限制,时间步长需要根据实际情况取一个折中的数值。

图5 时域水动力方程数值求解流程
为验证数值计算模型的准确性,以SJTU-S4 浮式风机的自由衰减测试为例,将数值计算与试验测试结果对比。水池模型试验地点为上海交通大学海洋工程深水池,试验模型为自主设计的SJTU-S4 浮式风机,见图6。该浮式风机设计水深100 m,模型缩尺比为1∶50,系泊系统采用3 根锚链,锚链间夹角为120°。
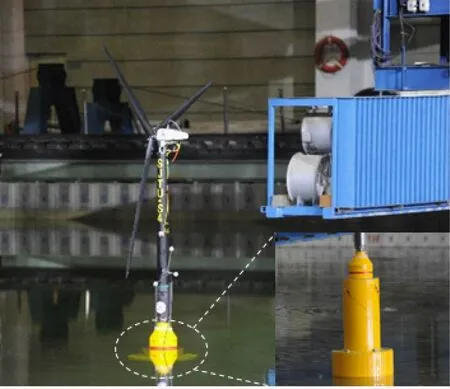
图6 SJTU-S4浮式风机模型试验
数值计算程序所得浮式风机的6 自由度静水衰减结果与水池静水衰减试验结果进行对比,如图7 所示。由图可知,开发的数值计算程序能准确计算浮体的运动响应情况。
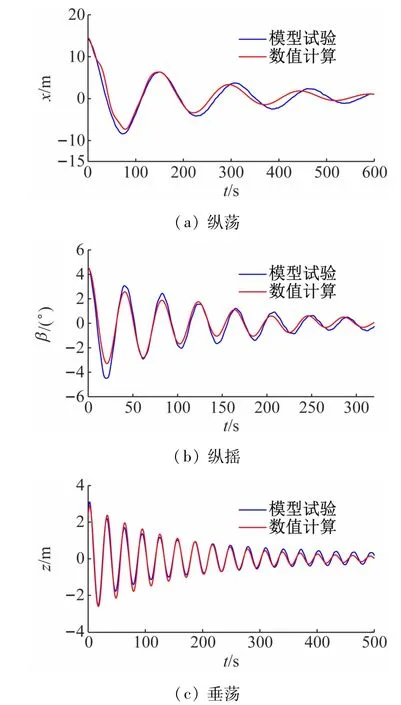
图7 SJTU-S4自由衰减结果
4 数据交互与运动控制系统
4.1 数据交互与运动控制
由于风力机运行在现实物理空间而浮式平台作用在虚拟数值空间,保证物理与数值空间数据交互的稳定性和可靠性至关重要。此外,浮式平台在环境载荷作用下的运动响应通过6 自由度平台加以实现,如何保证运动平台响应速度与数值计算速度之间的匹配性关乎系统运行稳定性。为此,本文开发了一套数据交互和运动控制系统。
4.1.1 数据交互与处理
本系统的数据交互存在于每一时间步内六分力传感器—数值模型—运动系统之间。
六分力传感器布置于风机塔筒底部与6 自由度平台的连接处,实时测量风机对运动平台的作用力,同时信号处理系统对采集的数据进行滤波处理;由于风机的重力和惯性力已经在时域求解程序中考虑(见式(1)),所以需要对传感器测量值Fload进行修正,即扣除风机模型的重力和惯性力,记为载荷修正量Fcorr。Fcorr根据风机的质量Mt、刚度Kt和运动响应q(t)计算:

将修正后的风机气动力Fwt根据缩尺关系转换为实尺度气动载荷,同时考虑由缩尺关系带来的时间尺度的变化,达到模型尺度的时历风力与实尺度时历风力的匹配,然后传输于数值模型时域运动方程。
在时域数值求解得到实尺度的浮体运动响应之后,同样需要根据缩尺定律进行缩比转化,即将实尺度运动时历转化为模型尺度运动响应,进而通过6 自由度运动平台加以实现。
4.1.2 运动控制
因存在实尺度、模型尺度之间时域数据的缩比转换和物理、数值空间之间时间对应关系,需要明确以下时间概念:①数值程序实尺度迭代时间步长Ts1;②数值程序求解每一时间步长需要的计算时间Ts2;③ 模型尺度时间步长Tm,即数据采集和运动机构的时间步长,对应采集频率和响应频率;④ 从数据采集到运动机构执行到指定位置,除程序计算时间以外的硬件设备传输响应时间Td。以上时间应有如下关系,以保证实尺度、模型尺度、物理和数值空间交互的匹配性:

在数值计算程序中,每一时间步长Ts1的计算时间Ts2之间存在一定偏差,导致实际步长T′m=Ts2+Td不完全等于理论Tm。为保证数值计算速度与运动响应速度之间的匹配性,需要先判断T′m与Tm的相对关系;如果T′m<Tm,需要设置时间等待来延迟运动指令的发送;如果T′m>Tm,则需要对时间差ΔT=T′m-Tm之后的位姿进行预测,预测方法可采用历史数据来进行拟合外推[14-15],然后将拟合数据输入给运动平台实现运动,同时拟合数据作为下一次数值迭代的初值。
4.2 浮体运动模拟系统
模拟浮体运动的6 自由度平台采用Stewart平台。Stewart 6 自由度运动平台具有刚度大、承载能力强、位置误差不累计等特点[16],可以用来实时模拟浮体的运动,平台结构如图8 所示。该平台由6 个铰接于地面的伺服电缸及其上部运动平面构成,运动平面为一刚性平板,与各电缸顶端铰接相连。控制柜中的解算程序可以将目标6 自由度姿态解算为对应的6 根丝杆的伸长量,然后控制伺服电动机转动,进而实现丝杆的不同伸长量,实现平台上平面在空间内的3 个方向线运动与角运动,从而对固连在其上部的模型风机实现6自由度运动控制,6 自由度运动平台参数如下:有效负载100 kg,垂向行程200 mm,横向行程±130 mm,纵向行程±130 mm,横滚范围±15°,俯仰范围±15°,扭转范围±15°,重复定位精度0.1 mm/0.1°。
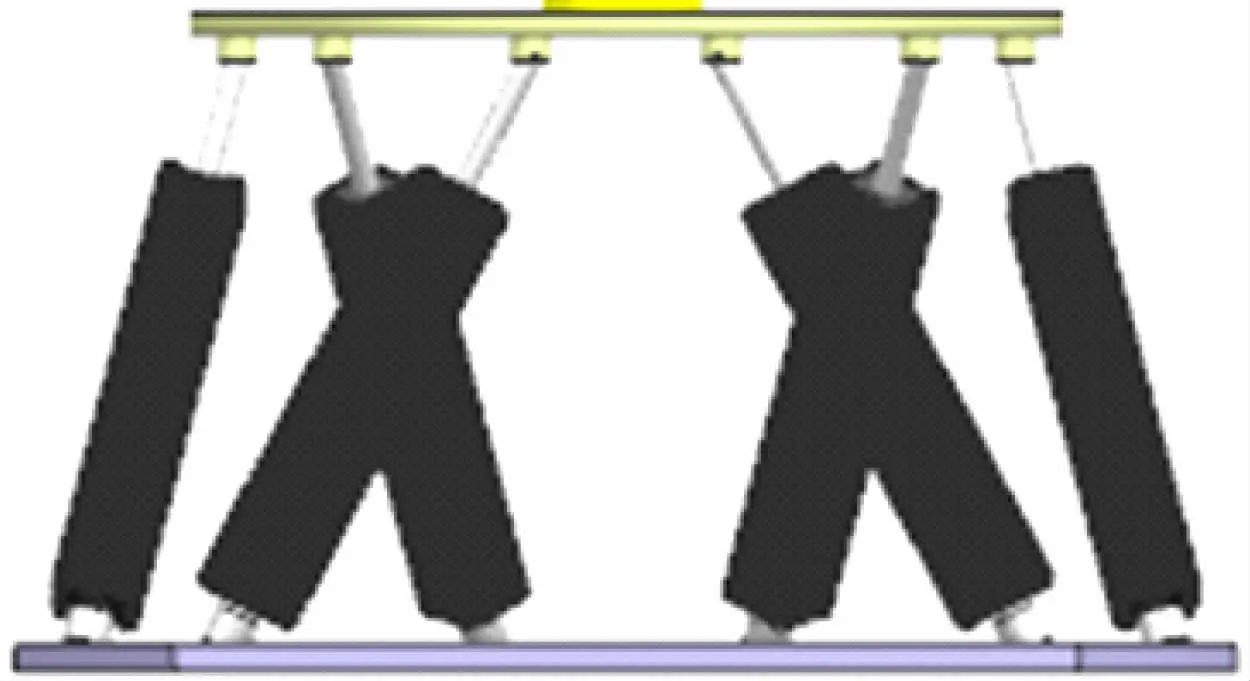
图8 6自由度运动平台示意图
利用测量精度为0. 01 mm 的激光测距仪对Stewart平台的运行性能进行了定位精度测试,分别选取线位移和角位移测试结果展示,如图9 所示。Stewart平台接收数值模型求解得到的每一时间步长结束时的浮体位移姿态,并实现该运动。

图9 运动平台性能测试
4.3 结果与讨论
基于以上物理、数值模型和数据交互与运动控制系统,搭建了一套海上浮式风机混合模型试验系统[17],如图10 所示。

图10 浮式风机混合模型试验系统
由于模型设计、制造的难度,及试验设备、场地等的限制,目前对于浮式风机发电功率、平台振荡作用下的气动载荷、偏航/变桨控制等方面的模型试验研究较少,该混合模型试验方法提供了一种解决方案。该方法可在质量高风场如航天风洞内进行试验,精细化机舱和叶片模型可精确刻画气动响应特征。由于数据交互转化关系中已消除物理风机模型的重力和惯性力,该方法中物理模型风机的质量不受限制,为开展广泛的风机伺服/结构控制研究提供了途径。同时,该方法可在数值模型中直接更改浮体结构,方便研究不同浮体运动响应对风机气动特性的影响;此外,脱离海洋工程水池进行试验,成本也将大幅下降。
本文方法的实现依赖于快速且合理准确的数值计算程序、快速的信号处理与高精度的运动执行,所以要求在保证物理现象的真实性的同时,尽可能简化模型以加快程序计算速度。为了提高系统的执行速度,可将计算电脑替换为相关的硬件控制板加快代码执行速度,缩小时间步长,提高求解精度。
5 结 语
本文提出了一种海上浮式风机混合模型试验方法,通过物理模型和数值模型相结合的方法将传统的浮式风机水池试验搬移到高质量风场中进行。系统主要由风机物理模型、浮体数值模型、数据交互与控制系统构成。浮式平台运动响应由数值计算模型求解得到,并通过运动平台加以实现。通过数据交互模块实现风机模型与数值模型之间的运动、载荷等信息交互。设计、开发了一套浮式风机混合模型试验系统,初步测试结果表明,该系统性能可靠。对于该系统在风浪联合作用下的运动性能与验证,将在后续研究中进行分析讨论。
猜你喜欢
长江科学院院报(2022年3期)2022-03-18
舰船科学技术(2021年12期)2021-03-29
航空发动机(2020年3期)2020-07-24
重型机械(2020年2期)2020-07-24
水利规划与设计(2020年1期)2020-05-25
建材发展导向(2019年10期)2019-08-24
上海船舶运输科学研究所学报(2019年1期)2019-04-19
振动工程学报(2018年3期)2018-07-05
西南交通大学学报(2016年6期)2016-05-04
浙江大学学报(工学版)(2015年7期)2015-03-01
