
一种全新的自动扶梯防非操纵逆转设计
2020-07-10 05:49张志高
商品与质量 2020年5期
张志高
东芝电梯(中国)有限公司 辽宁沈阳 110168
目前自动扶梯在公共场合中已经广泛使用,自动扶梯给我们的生活带来了极大的便利,但与此同时自动扶梯的安全性也受到了极大的关注,扶梯安全事故时有发生,造成自动扶梯事故的原因错综复杂,其中自动扶梯发生逆转导致的事故尤为严重。本文将对自动扶梯逆转的原因进行分析,并提出一种全新的逆转检测方法,行之有效的检测自动扶梯逆转的故障,当自动扶梯发生逆转时有效的检测出故障,停止自动扶梯保证乘梯人的人身安全。
1 自动扶梯发生逆转的原因
1.1 电气系统的风险
客户端电源错相、断相等造成了电动机反转,导致上行运转的自动扶梯出现逆转;客户端电源电压下降或突然失压且自动扶梯载荷较大致使驱动力不足,导致上行运转的自动扶梯出现逆转;低压元件发生粘连、短路、断路等故障,或安全电路(PESSRAE)、制动器回路等发生故障,使之失效,失去该有的保护、控制、制停等作用,导致自动扶梯逆转[1]。
1.2 机械系统的风险
驱动装置与梯级链轮之间的驱动链断链造成了自动扶梯逆转;驱动梯级的链条发生断链造成自动扶梯逆转;自动扶梯发生严重超载,造成电动机力矩不足而导致自动扶梯逆转;驱动装置与梯级链轮之间的驱动使用的皮带发生打滑而造成自动扶梯逆转;自动扶梯在运行中突然发生故障导致急停,而工作制动器不能提供足够的制动力矩而导致自动扶梯逆转。
2 自动扶梯非操纵逆转检出装置的设计
为了避免自动扶梯非操纵逆转造成的事故,在GB16899-2011《自动扶梯和自动人行道的制造与安装安全规范》和TSG T7007-2016《电梯型式试验规则》中将非操纵逆转的故障列入了重要的检验项目。本文将提出一种新颖的非操纵逆转的检出方法,使自动扶梯控制系统行之有效的检测出逆转故障。本文提出了一种以传感器检测梯级轴为手段的自动扶梯非操纵逆转检出方法,该方法能直接有效的检测出自动扶梯的非操纵逆转,在自动扶梯发生逆转前有效的停止扶梯防止事故的发生。本文设计的自动扶梯非操纵逆转装置主要包括运转中的逆转检出和运转停止后的逆转检出[2]。
2.1 自动扶梯运转中的非操纵逆转检出
如图1所示,在梯级回路上设置了两个传感器,传感器将对梯级后轮轴进行检测。首先,根据两个传感器检测梯级后轴信号的时间差,判断扶梯的运转方向;然后,与自动扶梯控制系统中获得的运转方向输入信号进行比较,当比较方向不同时判断为逆转,自动扶梯停止运行。
在图1中,传感器1与传感器2并排设置,传感器1、2之间需要隔开一定距离,便于传感器检测梯级后轴的信号形成时间差,主控制CPU将通过信号的时间差做出判断。为了防止误检出需要在启动扶梯后设置相应的补偿时间(补偿时间根据扶梯的额定运行速度而定),在扶梯启动后的补偿时间内不检测自动扶梯的逆转,补偿时间后开始开启自动扶梯的非操纵逆转检测功能。主控制CPU根据传感器1、传感器2检测的信号判断扶梯的运行方向,当传感器1与传感器2检测信号持续空白状态若干时间之后(视自动扶梯额定速度而定),当主控制CPU先获得传感器1检测信号时判断梯级向上侧旋转,相反主控制CPU获得传感器2检测信号时判断为梯级向下侧旋转。主控制CPU根据传感器判断梯级的旋转方向后将与控制系统获得的运行信号(扶梯启动时的输入方向信号)比较,比较结果为同方向时判定为自动扶梯正常运行,比较结果为反方向时判定为自动扶梯发生非操纵逆转故障,主控制CPU发出指令切断主控制回路接触器,扶梯停止运行。
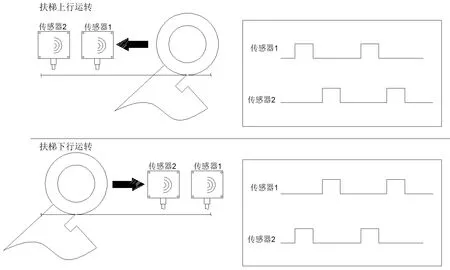
图1 非操纵逆转检出原理图
2.2 自动扶梯上行运转正常停止时的非操纵逆转检出
本文对自动扶梯非操纵逆转发生的场合进行了全面的考虑,因此增加了自动扶梯上行运转停止时的非操纵逆转检出。经分析认为自动扶梯上行运转正常停止后的若干时间内有发生非操纵逆转的可能,本文给出了针对该问题的解决方法。
自动扶梯停止后有效检出时间设置说明:运转方向不改变时的扶梯安全加速度为0.1m/s2。当发生逆转时速度为0.167m/s,在该速度状态下运行0.85m(梯级间距400mm×2+传感器1、传感器2偏差值为50mm) 的距离所要时间为5.1秒。自动扶梯加速至0.167m/s所要时间为16.7秒,因此合计时间为21.8秒,考虑余量可以将该段时间设置为25秒[3]。
在上述有效检出时间内,我们通过传感器1、传感器2的检测信号判断扶梯是否发生非操纵逆转。当扶梯停止后若主控制CPU得到传感器2的检测信号并在若干时间(视自动扶梯额定速度而定)以内主控制CPU连续得到传感器两次检测出信号,将判断为扶梯发生非操纵逆转。
3 结语
我们已经对本文提及的自动扶梯非操纵逆转检出的方法进行了试验验证,此次的设计无论是从理论上还是实际操作上都已经通过了测试,可以高效、及时准确的检测出自动扶梯的非操纵逆转故障。并实现了多角度监测了自动扶梯的非操纵逆转故障。与现阶段各电梯厂对自动扶梯非操纵逆转的检测方法相比存在着更稳定、更高效、更方便检查维修等优点,在使用效果上有极大的进步,它的安全性和可靠性也得到了大大的提高。
猜你喜欢
人民长江(2022年9期)2022-10-06
思维与智慧·上半月(2022年4期)2022-04-08
商品与质量(2021年20期)2021-04-22
小聪仔(幼儿版)(2020年12期)2020-02-01
发明与创新·中学生(2019年12期)2019-11-23
好孩子画报(2016年6期)2016-05-14
文理导航·趣味课堂(2016年3期)2016-04-26
人间(2015年21期)2015-03-11
中国建筑科学(2014年3期)2014-07-21
