风浪流作用下的FPSO 外输CALM 系统运动耦合分析
2020-07-09 09:56曲开成
三峡大学学报(自然科学版) 2020年4期
曲开成 张 旭
(河海大学 港口海岸与近海工程学院,南京 210098)
CALM 系统(catenary leg mooring system),即悬链锚腿系泊系统,是世界上最早被采用也是应用较为广泛的一种单点系泊形式[1],FPSO(Floating Production Storage and Offloading)与 CALM 系统的组合在海上石油运输中得到了广泛的应用.CALM 系统作为FPSO 的输油中转站,将FPSO 储存的原油通过若干柔性管传输到浮筒(CALM buoy)上,输送给穿梭油轮.在风、浪、流等环境载荷的作用下,浮筒和穿梭油轮会发生六自由度运动.此外,浮筒与系泊缆、油轮之间还会发生复杂的耦合运动[2].准确地预测CALM 系统的运动响应,掌握系统的响应规律,对于输油系统设计以及事故防范具有重要意义.
近年来许多学者开展了相关的研究.Wang等[3]采用SESAM 软件对风、浪、流载荷作用下的单点系泊系统进行了动态分析,认为风和流对锚链张力影响较大,尤其是流.垂荡是由随机波浪引起的.Cunff等[4]利用频域和时域内的非线性耦合分析,得出了浮筒系泊系统的RAO(response amplitude
operator,幅值响应算子),并通过比较分析发现,两者存在较大的耦合效应,进一步研究发现浮筒和系泊线的非线性阻尼是构成非线性项的主要原因.Umar与Datta[5]对浮筒非线性响应因素的研究结果表明,系泊线的非线性是产生浮筒运动非线性的主要因素,并计算了浮筒的一阶与二阶波浪力.Ryu等[6]进行了对比试验与耦合分析,发现对于浮筒纵摇运动的预报,利用基于相对流速的莫里森公式对裙板进行粘性建模将取得较好的结果.在对浮筒的垂直平面内的运动(纵荡、纵摇和垂荡)进行频域分析和时域分析后的结果表明:纵摇与纵荡和垂荡之间有耦合作用,裙板阻力的作用对于纵摇较为明显.作者还研究了水的粘性效应的影响,这是在时域完全耦合分析中实现的,而且将时域的分析结果与无系泊的自由浮筒和有系泊浮筒的运动试验结果进行比对,验证了时域结果.王冬姣,孙世鹏[7]采用特征函数展开及边界匹配的方法求解含裙板的CALM 浮筒作纵荡、垂荡和纵摇运动引起的辐射载荷,并研究了裙板参数对浮筒运动的影响规律.张大朋,刘建,白勇,等[8]研究了FPSO 的动力定位系统失效对CALM 浮筒的运动,以及对系泊缆、系船缆及输油软管有效张力的影响,研究表明在侧推器失效后,系泊系统中的突变张力无法有效分散到每根系泊缆绳上.康庄,张橙,孙丽萍[9]研究了FPSO 和外输系统的模型试验截断技术,并基于此开展了截断实验以研究系统的响应规律.
上述研究表明,对于系泊浮筒结构,不同的结构形式与系泊方等因素对其水动力响应特性有显著影响.本文的研究对象为FPSO 外输CALM 系统,存在浮筒、缆绳、输油管、穿梭油轮等多结构间的耦合作用,水动力响应特性更加复杂.因此,本文拟基于水动力分析软件,建立包括浮筒、穿梭油轮、系泊线及系船缆在内的不同类型结构的运动响应数值模型,考虑结构间的相互影响,对风浪流作用下的CALM 系统进行时域耦合分析,旨在对CALM 系统在自存工况中的水动力响应特性及其环境敏感性进行分析,以期为实际工程设计提供参考和建议.
1 数值模拟模型
首先基于AQWA 软件进行频域分析,得到了浮筒与穿梭油轮的幅值响应算子(RAO)、附加质量和辐射阻尼等参数.在此基础上,基于OrcaFlex软件建立包括浮筒、穿梭油轮、系泊线及系船缆在内的耦合数值模型,考虑结构间的相互影响,对风浪流作用下的CALM 系统进行时域耦合分析.
1.1 载荷计算方法
外载荷主要包括风、浪、流以及系泊缆的拉力.
1.1.1 流载荷
流载荷的作用力和力矩可表示如下:
式中:Fxc、Fyc和Mxyc分别是纵向流体力、横向流体力以及流体力矩;Cxc、Cyc与Cxyc分别为纵向流体力系数、横向流体力系数、流体力系数;ρc为流体密度;T为平均吃水;VcR为相对速度.
1.1.2 风载荷
风力和力矩可表示如下:

其中:Fxw、Fyw和Mxyw分别为纵向风力、横向风力和风力矩;Cxw、Cyw和Cxyw分别为纵向风力系数、横向风力系数和风力矩系数;ρcw为空气密度;VwR为10 m 高处的风速;AL为横向受风面积;AT为纵向受风面积.本文采用DNP 风谱,参数的取值可以参考OCIMF规范[10].
1.1.3 波浪载荷与缆绳张力
基于势流理论,根据辐射/绕射理论计算一阶波浪载荷.采用近场法计算平均二阶波浪漂移力,即直接将湿表面上的压力变化进行积分,用集中质量法计算系泊缆的动力学特性[11].
1.2 模型主尺度
FPSO 外输CALM 系统的总体结构示意图如图1所示.需要注意的是,M1组系泊缆的参数与其他两组系泊缆的参数存在差异.系统的工作水深为1 500 m,浮筒与穿梭油轮的详细主尺度见表1.系泊缆的具体参数见表2.

图1 FPSO 外输CALM 系统的总体结构示意图

表1 浮筒和穿梭油轮主尺度

表2 系泊缆参数
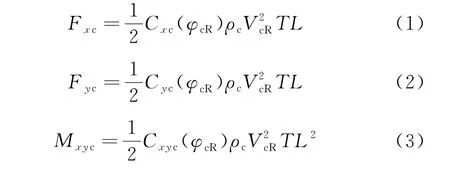
建立的基于AQWA 的浮筒与穿梭油轮频域分析模型以及基于OrcaFlex的水动力计算模型分别如图2与图3所示.具体可参考文献[12].
图2 浮筒与穿梭油轮AQWA 计算模型

图3 整体系统OrcaFlex计算模型
2 自存工况分析
卸油系统的工作地点是西非海域.该海域波浪条件相对温和,主要波浪成分为长周期的涌浪,局部地区也有风浪[13-14].根据波浪的统计数据,波浪类型可以分为主涌、次涌和风浪[15].考虑到次涌的能量密度相对较弱,因此在环境敏感性分析中重点考虑主涌和风浪的作用.
为了研究CALM 系统在自存工况下的响应,参考西非指定海域的海况统计数据,选取西非海域百年一遇的海况作为环境载荷进行数值模拟.考虑到目的是研究CALM 系统的水动力响应对于不同环境参数的敏感性,因此分别选取了涌浪、风浪(风速与风浪参数高度相关)以及流主导的海况进行计算.具体的参数见表3.其中,Hs代表有义波高,Tp代表波浪周期.在自存工况中,穿梭油轮将停止作业,系统中主要包括浮筒和系泊缆绳.

表3 自存工况的环境参数
选取了环境方向为0°、180°、240°和300°的4个典型工况进行计算(方向的定义可见图1),并假定环境载荷同向.为了对系统的响应特征进行分析,选取240°方向的涌浪主导海况为典型工况进行分析.选取具有代表性的(900 s~1 200 s内的)浮筒六自由度运动历时曲线,如图4所示.
从图4所示的历时曲线的整体变化趋势来看,各自由度的幅值随时间的变化规律存在一定的相关性,因此可以推断浮筒的各自由度运动存在相同的激励力.虽然各自由度运动之间存在相关性,但还是存在一些差异,特别是横荡、横揺与艏揺曲线中明显可以发现大振幅低频运动的特征.因此,为了更准确地分析浮筒的运动特性,对各自由度的运动开展相应的频谱分析,如图5所示.

图4 浮筒六自由度运动历时曲线(涌浪主导工况,240°)

图5 浮筒六自由度运动频谱分析(涌浪主导工况,240°)
由图5可知纵摇(Pitch)运动的频谱中均存在约0.07 Hz与0.13 Hz两个主频率,分别与主涌和风浪的频率相对应(见表3).此外,与主涌相对应的频率分量明显强于与风浪相对应的频率分量.由此可以推断,浮筒的纵摇运动受涌浪与风浪的共同激励,并且受涌浪的影响更大.在纵荡(Surge)与横荡(Sway)运动的频谱中,除了与主涌和风浪对应的频率分量之外,还存在一个较大的低频分量.表明在波浪的激励下,浮筒在纵荡与横荡方向上除了随波浪运动之外还会受到二阶波浪力的影响,产生明显的低频大幅运动.同理,对各自由度的运动频谱进行分析,可以得到以下结论:浮筒的升沉与纵摇运动主要受涌浪的影响,运动频率与涌浪频率接近.纵荡、横荡与横揺运动的主要激励力为涌浪,其在随着涌浪频率运动的同时,还会受到二阶波浪力的作用,产生明显的低频运动.而艏揺主要随风浪运动,并存在低频运动.
为研究浮筒运动响应对环境参数的敏感性,分别给出浮筒各自由度的运动在不同主导环境载荷中各方向上的运动幅值,如图6所示.其中横坐标为环境载荷方向(environmental drections),用参数e表示;纵坐标为最大幅值(maximum amplitude),用参数Amax表示.

图6 浮筒各自由度的运动在不同主导环境载荷中各方向上的运动幅值
由图6(a)与图6(e)可知,纵荡与纵摇运动在涌浪主导的环境下始终最大,并且当环境载荷方向发生变化时,纵荡与纵摇运动的幅值也会随之发生明显变化.结合上文中的频域分析可以得出,浮筒的纵荡与纵摇主要是涌浪引起的,并且对于环境载荷的方向较为敏感.由图6(c)可知,垂荡的最大位移在涌浪主导的环境下始终最大,并且当环境载荷方向发生变化时,其幅值基本保持不变.结合上文中的频域分析可以得出,浮筒的垂荡运动主要受涌浪的影响,且对环境方向不敏感.由图6(b)与图6(d)可知,浮筒的横摇与横荡运动的最大幅值在主涌浪以流主导的环境中较为接近,并且当环境载荷方向发生变化时,其幅值变化明显.表明浮筒的横摇与横荡运动受涌浪与流的影响均很大,特别是在横浪与横流的情况下,两者的共同作用将使浮筒产生较大的幅值.因此,在实际工程中,应该根据相关海域的风浪流特征,尽量避免横浪或者横流方向布置.图6(f)的现象非常有趣,频域分析表明,当环境载荷方向为240°时,艏揺运动主要随风浪运动,但其在涌浪主导工况中的运动幅值却远大于风浪主导的运动幅值.由此可以推断,艏揺运动中的高频分量主要受风浪的影响,但其运动中的低频分量主要是由涌浪造成的.
不同环境工况下,系泊缆绳的受力情况见表4.由表4可知,涌浪造成的系泊缆绳最大应力对于环境载荷方向并不敏感,并且其最大值始终小于风浪主导的工况.风浪与流主导的工况中,随着环境载荷方向从0°增加到300°,系泊缆绳的最大应力呈现出先增大后减小的趋势,并且当环境载荷方向为180°左右时应力最大.其中,流载荷造成的最大应力对环境载荷更加敏感,在入射方向为180°~240°左右的区间内将造成比波浪载荷更大的缆绳应力.从总体上看,最危险的工况出现在环境载荷方向180°,并且风和流较大时;当环境载荷方向为0°时,系泊缆的受力最小.

表4 不同环境工况下系泊缆绳受力情况
3 作业工况分析
本节主要研究CALM 系统在作业工况下的响应,选取西非海域一年一遇的海况作为环境载荷进行数值模拟,具体参数见表5.

表5 作业工况的环境参数
在作业工况中,穿梭油轮与浮筒相连进行正常作业,此时的CALM 系统中包括浮筒、系泊缆绳和穿梭油轮.系船缆的参数见表6.数值模拟中,穿梭油轮的阻尼等参数根据文献[16]的相关模型实验确定.

表6 系船缆参数
对于单点系泊穿梭油轮,由于“风标效应”,在不同的环境载荷下,其平衡位置也会发生相应的变化,从而保证受力最小.因此,为了研究穿梭油轮在不同环境条件下的响应,以环境载荷方向为240°的工况为例,分别分析了涌浪主导以及风浪主导这两种海况下穿梭油轮的运动以及系船缆的顶部张力响应.在相应的海况中,穿梭油轮的艏揺角度以及系船缆的受力情况如图7所示.

图7 环境载荷方向为240°时穿梭油轮的艏揺以及系船缆的顶部张力响应
由图7可知,在涌浪主导的海况中,最大艏揺角为67°,系船缆最大张力为725 k N.而在风浪主导的海况中,最大艏揺角度为90°,系船缆最大张力2 900 k N.显然,在风浪主导的环境工况中,穿梭油轮的摆动更剧烈,并且系船缆的张力更大,因此风浪对于CALM 系统的威胁更大.对其他环境载荷方向的工况进行类似分析,在最危险的工况中,系船缆的最大张力约为3 000 k N,小于其破断力.与此同时,系泊缆的最大张力约为2 800 k N,远小于其破断力.因此,所研究的外输系统的安全性满足要求.
此外,根据计算得到的穿梭油轮极限位置,在图8中绘出了穿梭油轮低频运动的最大扫掠面积,旨在为输油系统的设计提供参考.输油系统中其他结构与设备的布置应当尽量远离图示区域.

图8 穿梭油轮的极限扫掠面积
4 结 论
本文基于水动力数值模拟软件,对风浪流作用下的CALM 系统进行时域耦合分析,分析了其水动力响应特性及其对环境载荷的敏感性.主要得到以下结论:
1)浮筒的纵摇运动受涌浪影响较大,并且对于环境载荷的方向较为敏感;浮筒的垂荡运动主要受涌浪的影响,且对环境方向不敏感;浮筒的纵荡、横荡与横揺运动除了随涌浪运动外,还会在二阶波浪力的作用下产生大幅低频运动;艏揺运动中的高频分量主要受风浪的影响,低频分量主要是由涌浪造成的.
2)涌浪造成的系泊缆绳最大应力对于环境载荷方向并不敏感,而风浪与流载荷造成的系泊缆绳最大应力对于环境载荷却很敏感.
3)在作业工况中,穿梭油轮在风浪主导的环境条件中摆动更剧烈,并且系船缆的张力更大.
4)本文的CALM 系泊系统在环境载荷方向在0°时最安全,而最危险的工况出现在风和流较大时环境载荷方向180°左右.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年10期)2022-06-17
房地产导刊(2022年4期)2022-04-19
中国新技术新产品(2021年2期)2021-04-13
小雪花·小学生快乐作文(2020年3期)2020-10-13
船海工程(2020年3期)2020-07-31
汉语世界(The World of Chinese)(2019年3期)2019-07-01
船舶与海洋工程(2018年4期)2018-09-10
中国航海(2018年1期)2018-05-07
船海工程(2018年1期)2018-03-01