基于线性算子不等式的时滞电力系统稳定性分析
2020-07-09 06:42华长春王毅博
燕山大学学报 2020年3期
华长春, 王毅博
(燕山大学电气工程学院,河北秦皇岛 066004)
0 引言
频率是衡量电力系统稳定运行的重要指标。电网频率的波动可能会降低系统的机械功率,甚至影响整个电网系统的稳定运行[1-2]。负载频率控制系统(Load Frequency Control,LFC)通过调节电网的电力供需,将频率维持在某个固定值。LFC系统中信息传输大多依靠开放式通讯网络,这种方式能够以较低功耗实现双向通讯。然而,开放式通讯网络会导致信号在监测和传输过程中出现等待、阻塞和丢包等情况,称为时滞现象。时滞会直接影响电网的性能,甚至造成电网系统的不稳定。因此,准确估计电力系统的时滞稳定裕度能够为LFC系统的控制器设计提供指导,具有重要的现实意义。
具有开放式通信网络的LFC系统是一个典型的时滞系统[3-5]。时滞微分方程(Delay Differential Equation,DDE)是表示时滞LFC系统最常用的方法之一。使用DDE表示的时滞LFC系统的稳定性问题已得到广泛研究。文献[6]讨论了具有PI控制器的单区域和多区域LFC系统的稳定性问题,获得了时滞稳定裕度和控制器参数之间的关系。文献[7]通过构建新型Lyapunov-Krasovskii(L-K)泛函,进一步研究了控制器增益与时滞之间的联系以及不同区域之间的相互作用。文献[8]针对单区域LFC系统,利用逆凸不等式方法,得出一种鲁棒稳定判据。通过构建增广型L-K泛函,文献[9]利用Bessel-Legendre积分不等式处理交叉项,研究了时滞单区域LFC系统稳定性问题,提出一种保守性较低的稳定判据。文献[10]研究了具有时滞和非线性干扰的LFC系统稳定性问题,通过Bessel-Legendre积分不等式建立了新型稳定判据。文献[11]提出一种模型重建的方法,结合Wirtinger积分不等式,得出一种计算复杂度较低的稳定判据。综上所述,针对时滞LFC系统的稳定性问题,现有文献普遍采用基于DDE的时域方法,并取得了许多成果。由于构造L-K泛函没有普遍规律,分析过程需要处理积分项,不可避免地增加了稳定判据的保守性。因此,针对时滞多区域LFC系统的稳定性问题还有很大的研究空间。
偏微分方程和常微分方程(PDE-ODE)的耦合形式也可用于表示系统的时滞现象[12-13]。但尚未成为时滞系统分析和综合的主流。最近,基于半群理论和线性算子理论,文献[14]提出了一类线性偏积分算子(Partial Integral,PI),基于PI算子可将PDE-ODE表示的时滞系统直接转化为偏积分方程(Partial Integral Equation,PIE)的形式。文献[15]利用MATLAB工具箱PIETOOLS能够高效地构造和求解PI算子不等式。通过构建完全型L-K泛函来分析系统的稳定性,分析过程不涉及积分不等式技术的使用,因此所得结果几乎不包含保守性。线性算子理论为时滞多区域LFC系统的稳定性分析提供了新思路。
本文进一步研究了时滞多区域LFC系统的稳定性分析问题。首先,构建PIE表示的时滞多区域LFC系统模型,构建完全型L-K泛函并以PI算子内积的形式表示,避免在稳定性分析中使用积分不等式技术。然后,基于李雅普诺夫方法得出一种保守性较低的稳定判据,结合PIETOOLS工具箱获得系统的时滞稳定裕度,进一步分析时滞稳定裕度对控制器参数设计的影响。最后,数值算例和仿真试验表明了所提方法的有效性。

1 时滞多区域LFC系统模型
1.1 传统系统模型
本节回顾了传统时滞多区域LFC系统模型,其结构如图1。其中,ΔPvi、ΔPdi、ΔPmi和Δfi分别代表i区域的气门阀位置变化量、负载扰动、机械输出功率和系统频率偏差。Mi和Di分别是i区域发电机的转动惯量和阻尼系数。Tti和Tgi分别表示i区域汽轮机和机组调速器的惯性时间常数,Tij代表区域i和区域j间联络线的同步系数,ΔPtie-i和ACEi(t)表示区域i联络线上的净交换功率偏差和区域控制误差。为方便分析,使用静态输出反馈控制策略代替PID控制策略,可得传统LFC系统模型如下:
(1)
式中
F=diag{F1,,FN},ΔPd(t)=[ΔPd1,ΔPd2,,ΔPdN]T,
Adii=-BiKiCi,Adij=-BiKiCij,
需要注意的是区域间联络线上净交换功率偏差和为零,即
根据文献[11]可得,扰动并不会影响LFC系统的内部稳定性。因此,传统多区域LFC系统可转换为如下多重时滞系统的形式
(2)
其中,时滞满足0≤τ1≤τ2≤τN。
图1 时滞多区域LFC系统框图
Fig.1 Scheme diagram of delayed multiarea LFC system
1.2 基于PIE系统模型
本节根据DDE表示的传统多区域LFC系统模型,推导得出基于PIE的系统模型。首先引入PI算子的定义。

(3)
其中,

证明对于任意矩阵函数G1:[-1,0]×[-1,0]→Rm1×n,G2:[-1,0]×[-1,0]→Rm2×n和函数f(s)≥0,s∈[-1,0],如下条件成立


则PI算子H满足
(4)
我们定义如下函数
ψi(t,s)=x(t+sτi),s∈[-1,0],
(5)
显然,ψi(t,s)可以表示系统时滞信道的历史状态,其边界条件如下:
(6)
根据微积分基本定理,可得

(7)
ψi(t,-1)=x(t-τ)
(8)
定义
(9)
结合(5)~(9),可得
(10)
式中
将(7)~(8)代入系统(2),可得
(11)
(12)
综合(11)~(12),定义PI算子T:Zn,nN→Zn,nN和A:Zn,nN→Zn,nN,将系统(2)转换为PIE的形式:
(13)
式中
DDE表示的LFC系统(2)中包含了隐式动态x(t-τi),加大了系统稳定性分析的难度。而基于PIE的LFC系统(13)通过边界条件(6)和状态ψ(t,s)定义系统隐式动态,使得系统形式更接近于线性系统,简化了系统的稳定性分析过程。
当ψ(t,s)满足边界条件(6)时,系统(13)的状态完全等价于系统(2),即两个系统具有相同的解x(t)。所以,针对系统(2)的稳定性分析问题可以通过研究系统(13)得到。
2 稳定判据
本节给出了时滞多区域LFC系统的稳定判据。根据PIE表示的LFC系统模型,构建完全型L-K泛函,以算子不等式的形式给出了系统的稳定判据。最后利用PIETOOLS工具箱对判据进行求解,计算系统的时滞稳定裕度。
完全型L-K泛函具有如下形式:
V(t)=
(14)
将(14)表示为PI算子内积的形式,如下
V(t)=〈ν,Hν〉Z,
(15)
式中
完全型L-K泛函相比传统L-K泛函更具一般性。完全型L-K泛函(15)中的待定参数均为矩阵函数,而传统L-K函数中的待定参数均为矩阵。因此完全型L-K泛函具有较大的求解域,更具一般性,有利于降低所得判据的保守性。对于系统(13),得到如下稳定判据。
T*HA+A*HT<0
(16)
证明基于PI算子理论,建立完全型L-K泛函如下:
V(xf)=〈Txf,HTxf〉Z,
(17)
由于PI算子是正定算子,所以对于任意ε,V(xf)≥ε‖xf‖2成立。对V(xf)求导可得
〈xf,(T*HA+A*HT)xf〉Z,
(18)
传统的时域方法在求解L-K泛函导数时,需要引入积分不等式技术处理交叉项,而积分不等式技术的本质是对泛函导数的近似求解,不可避免地在稳定判据中引入保守性。本文提出的方法不涉及积分不等式技术的使用。因此,所提出的稳定判据具有较低的保守性。
对于定理1的求解可以基于PIETOOLS工具箱。首先根据相应系统参数,构建系统PIE表示的系统方程,然后设定时滞h的初始值,通过PIETOOLS迭代求解算子不等式(15)是否存在可行解,进而判断系统是否为渐进稳定。求解时滞稳定裕度的计算流程如图2所示。
图2 时滞稳定裕度的计算流程图
Fig.2 Calculation flow chart of the maximum delay boundary
3 仿真结果
在本节中,以单区域和多区域LFC系统为例进行仿真研究,根据文献[11]给出的系统参数(如表1所示)。计算LFC系统在不同控制增益下的时滞稳定裕度,并将仿真结果与现有文献进行比较,表明本文所提方法的有效性与优越性。
表1 系统参数表
Tab.1 Table of system parameters

TtTgRDβMT12区域10.300.100.051.0021.0010.000.198 6区域20.400.170.051.5021.5012.000.198 6
3.1 时滞单区域LFC系统
针对时滞单区域LFC系统,将定理1所获得的时滞稳定裕度与文献[16]给出的结果进行比较,如表2所示。可以得出,在相同控制器增益下,定理1所得的时滞稳定裕度远大于文献[16]的结果。表明本文所提出稳定判据具有较低的保守性。
表2 时滞单区域LFC系统时滞稳定裕度表
Tab.2 Table of maximum delay boundary for delayed one-region LFC systems

KPKI文献[16]本文方法KPKI文献[16]本文方法0.200.0530.3934.220.600.1012.3017.190.400.0526.3835.830.600.158.9411.270.600.0520.6934.920.600.207.058.310.100.1016.0616.110.800.108.9214.290.200.1016.4316.850.800.156.579.390.400.1015.0917.650.800.205.186.86
根据定理1,通过设置不同的控制器增益(KP∈[0,1],KI∈[0,1])获得相应的时滞稳定裕度,如表3所示。不同的控制器参数对时滞稳定裕度的影响也不同。当比例增益KP固定时,时滞稳定裕度随着KI的增加而减小。而KP对时滞稳定裕度的影响可分为两个阶段。当控制器积分增益KI恒定时,当KP<0.4时,时滞稳定裕度的变化与KP成正比;当KP>0.4时,时滞稳定裕度的变化与KP成反比。当KI固定时,例如KI=0.05,时滞稳定裕度的最大值出现在KP=0.4处,而当KP>0.6时,时滞稳定裕度会迅速衰减。
表3 不同控制器增益下时滞单区域LFC的时滞稳定裕度表
Tab.3 Table of maximum delay boundary for delayed two-region LFC system at different controller gainss
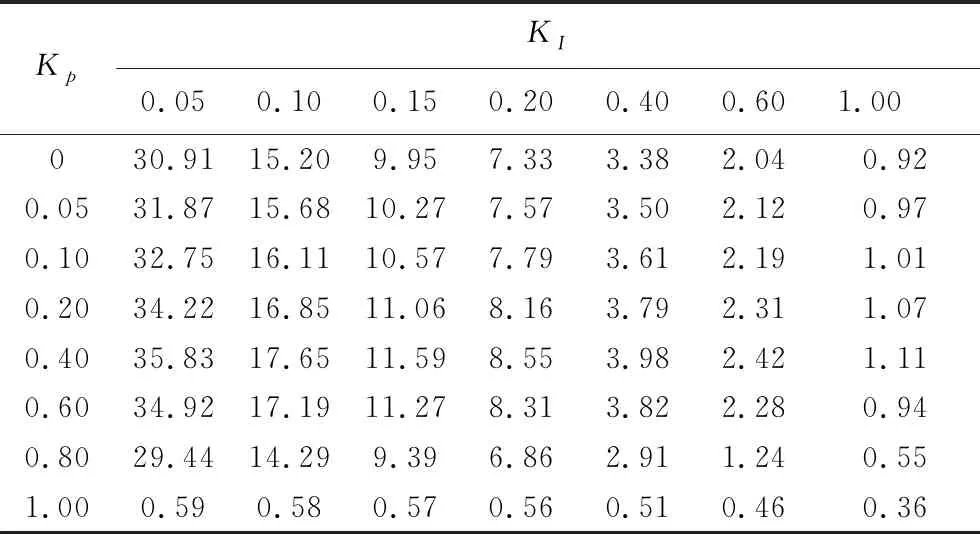
KpKI0.050.100.150.200.400.601.00030.9115.209.957.333.382.040.920.0531.8715.6810.277.573.502.120.970.1032.7516.1110.577.793.612.191.010.2034.2216.8511.068.163.792.311.070.4035.8317.6511.598.553.982.421.110.6034.9217.1911.278.313.822.280.940.8029.4414.299.396.862.911.240.551.000.590.580.570.560.510.460.36
针对具有PI控制器的单区域LFC系统进行仿真。根据文献[7],区域控制误差ACE(t)的信号更新周期被设置为两秒,扰动发生在15 s处。根据表2可得,当KP=0.6,KI=0.1时,文献[16]和定理1得到的时滞稳定裕度分别为12.30 s和17.19 s。设置不同的时滞上界(τ=12,τ=17和τ=18),得到系统状态ACE(t)和Δf在不同时滞条件下的响应曲线,如图3所示。当时滞最大上界为12 s和17 s时,系统是渐进稳定的,时滞最大上界为18 s时,系统是不稳定的。仿真结果表明了本文提出方法的有效性。
图3 不同时滞上界系统的状态响应
Fig.3 State response of systems with different time-delay upper bounds
3.2 时滞多区域LFC系统
针对时滞双区域LFC系统进行仿真,由表4可得,控制器参数为KP=0.4,KI=0.2,时滞参数为τ=9.00,θ=70°,两个区域的时滞上界分别为8.45 s和3.07 s。系统的状态响应曲线如图4所示,系统是渐近稳定的。
表4 时滞双区域LFC系统时滞稳定裕度表
Tab.4 Table of maximum delay boundary for delayedtwo-region LFC systems

θ/(°)文献[4]文献[7]文献[11]本文方法04.865.367.598.43204.785.978.658.95405.717.1910.9711.00456.177.5411.8711.92505.977.1711.1111.14704.935.968.739.00904.895.357.538.54
图4 多区域LFC系统的状态响应
Fig.4 State response of multi-area LFC system with time-delays
4 结论
本文讨论了时滞多区域LFC系统的稳定性分析问题。通过PIE表示具有PID控制器和通信延迟的多区域LFC系统。结合线性算子理论,采用完全型L-K泛函,获得保守性较低时滞相关稳定判据。通过数值算例分析了时滞稳定裕度与控制器参数的关系,对实际电网系统的控制器参数设计具有指导意义。
猜你喜欢
电气电子教学学报(2022年3期)2022-07-30
中国舰船研究(2022年1期)2022-03-19
云南大学学报(自然科学版)(2022年1期)2022-02-21
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
校园英语·上旬(2020年1期)2020-05-09
科学导报·科学工程与电力(2019年22期)2019-10-21
北方工业大学学报(2019年5期)2019-03-30
宇航总体技术(2018年5期)2018-10-15
上海师范大学学报·自然科学版(2018年3期)2018-05-14